1.本说明书公开超声波诊断装置,特别是公开具有接受来自操作员的指示的输入的操作面板的超声波诊断装置。
背景技术:
2.作为医疗器械而使用的超声波诊断装置通常具有:装置主体,其进行超声波图像的形成处理等;主显示器,其显示超声波图像等;操作面板,其接受来自医师等操作员的指示的输入。操作面板具有开关、定点设备(pointing device)、旋转钮等。另外,操作面板也可以具有显示用于指示输入的各种信息的子显示器。
3.以往,提出了操作面板由运动机构支承、且能够通过运动机构的动作而变更操作面板的姿态(即位置以及朝向中的至少一方)的超声波诊断装置。
4.例如,在日本特开2011-245041号公报中,公开有能够通过多个运动机构而变更操作面板的姿态的超声波诊断装置,该多个运动机构包括变更操作面板的高度的升降机构、进行操作面板的左右方向的滑动运动的左右滑动机构、进行操作面板的前后方向的滑动运动的前后滑动机构以及进行操作面板的水平旋转运动的旋转机构。
5.将操作面板支承为能够变更其姿态的运动机构通常具备用于维持操作面板的姿态的锁定机构。锁定机构通常在各运动机构分别设置。例如,在日本特开2011-245041号公报所记载的超声波诊断装置中,记载有限制(锁定)左右滑动机构的运动的锁定机构以及限制前后滑动机构的运动的锁定机构。
6.在设置有多个锁定机构的情况下,期望能够通过对一个操作部的操作来变更多个锁定机构的限制状态。限制状态的变更是指在未限制运动机构的运动的状态(解锁状态)与限制了运动机构的运动的状态(锁定状态)之间相互进行状态变化。
7.在日本特开2011-245041号公报所记载的超声波诊断装置中,能够通过配置于操作面板的前侧的松脱杆,而变更左右滑动机构以及前后滑动机构的限制状态。然而,期望能够通过对一个操作部的操作,来进行更多的锁定机构的限制状态的变更,特别是变更对包括变更操作面板的高度位置的上下运动机构在内的多个运动机构的运动进行限制的多个锁定机构的限制状态。在日本特开2011-245041号公报所记载的超声波诊断装置中,未记载升降机构的锁定机构的限制状态也能够通过上述的松脱杆变更。以往,存在升降机构的锁定机构的限制状态的变更由脚踏板等进行的情况,在日本特开2011-245041号公报所记载的超声波诊断装置中,也理解为通过对相对于松脱杆另外设置的、脚踏板等其他操作部的操作来变更升降机构的锁定机构的限制状态。
8.需要说明的是,也考虑根据对一个操作部的操作使马达等电动部件动作,从而变更对包括上下运动机构在内的多个运动机构的运动进行限制的多个锁定机构的限制状态。
技术实现要素:
9.本说明书所公开的超声波诊断装置的目的在于,在超声波诊断装置中,能够不使
用电动部件,而通过对一个操作部的操作,来变更对包括变更操作面板的高度位置的上下运动机构在内的多个运动机构的运动进行限制的多个锁定机构的限制状态。
10.本发明的超声波诊断装置的特征在于,具备:操作面板,其接受来自操作员的指示的输入;多个运动机构,其包括进行对所述操作面板的高度位置进行变更的上下运动的上下运动机构,且用于对所述操作面板的位置或者姿态进行变更;多个锁定机构,其限制所述多个运动机构的运动;一个操作部;以及缆线,其将所述操作部与所述多个锁定机构分别连接,当所述操作部被所述操作员操作时,通过所述缆线的作用,而变更基于所述多个锁定机构的限制状态。
11.发明效果
12.根据本说明书所公开的超声波诊断装置,在超声波诊断装置中,能够不使用电动部件,而通过对一个操作部的操作,来变更对包括变更操作面板的高度位置的上下运动机构在内的多个运动机构的运动进行限制的多个锁定机构的限制状态。
附图说明
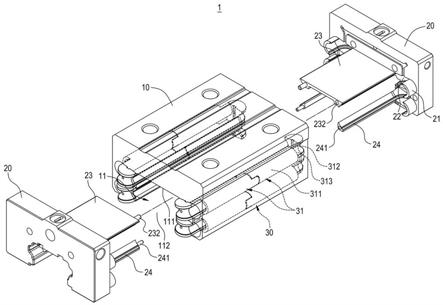
13.图1是本实施方式的超声波诊断装置的外观立体图。
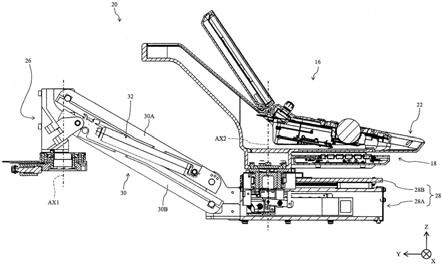
14.图2是从本实施方式的可动支承机构的侧面观察到的局部剖视图。
15.图3是上下锁定机构的侧视图。
16.图4是示出第一旋转运动机构以及第一旋转锁定机构的仰视图。
17.图5是第一锁定销和第一锁定孔的放大图。
18.图6是可动基部的立体图。
19.图7是示出第二旋转锁定机构的剖视图。
20.图8是示出可动基部的内部结构的俯视图。
21.图9是示出前后锁定机构的立体图。
22.图10是示出从各锁定机构延伸的各缆线的回绕路径的图。
23.图11是示出操作部以及缆线转接机构的俯视图。
24.图12是示出操作部以及缆线转接机构的变形例的俯视图。
具体实施方式
25.图1是本实施方式的超声波诊断装置10的外观立体图。超声波诊断装置10构成为包括装置主体12、主显示器14以及操作面板16。另外,超声波诊断装置10包括与装置主体12连接、并相对于被检体进行超声波的收发的超声波探测器(未图示)。在本说明书中,如图1所示,装置主体12的宽度方向由x轴表示,将x轴的正方向称为“右”,将x轴的负方向称为“左”。另外,装置主体12的进深方向由y轴表示,将y轴的正方向称为“后”,将y轴的负方向称为“前”。另外,装置主体12的高度方向由z轴表示,将z轴的正方向称为“上”,将z轴的负方向称为“下”。
26.装置主体12对超声波探测器发送用于使其向被检体发送超声波的发送信号。另外,装置主体12基于来自超声波探测器的接收信号,而进行超声波图像的形成处理。主显示器14显示装置主体12所形成的超声波图像等。
27.操作面板16具有开关、定点设备、旋转钮等,并接受来自医师等操作员的指示的输
入。特别是,操作面板16由操作员进行操作,以进行被检体的超声波诊断。在本实施方式中,操作面板16构成为包括供上述的开关等操作件配置的平板状的操作盘16a以及供与指示的输入相关的各种信息显示的子显示器16b。子显示器16b以从操作盘16a的后端部朝向上方向立起设置的方式设置。操作面板16载置于载置台18之上。载置台18是以使上侧面稍微朝向前方向的方式前后倾斜的平板状的构件,在载置台18的上侧面载置操作盘16a。由此,操作盘16a以稍微朝向前方向的方式倾斜,操作员更容易地进行操作盘16a的操作。在操作面板16载置于载置台18后,操作面板16与载置台18的位置关系固定,因此载置台18的运动或者姿态与操作面板16的运动或者姿态意义相同。
28.载置台18由可动支承机构20支承。可动支承机构20构成为包括能够运动的多个运动机构。由此,载置台18被支承为能够变更其姿态(位置以及朝向中的至少一方)。特别是,载置台18被可动支承机构20支承为能够在装置主体12的上方空间变更姿态。另外,可动支承机构20所包括的各运动机构具备对运动进行限制的锁定机构。锁定机构的限制状态的变更(即未限制运动的解锁状态以及限制运动的锁定状态之间的相互的状态变化)通过操作员的操作来进行。可动支承机构20所包括的多个锁定机构的限制状态的变更通过由操作员操作在载置台18的前端部的左右方向大致中央设置的操作部22来进行。关于可动支承机构20所包括的各运动机构、各锁定机构以及操作部22的详细情况在后叙述。
29.图2是示出本实施方式的可动支承机构20的侧视图。在图2中,其局部成为剖视图。可动支承机构20大致区分的话构成为包括上述的载置台18、从装置主体12立起设置的固定支柱24(参照图1,在图2中未图示)、与固定支柱24连接的旋转支柱26、将载置台18支承为能够旋转的可动基部28以及将旋转支柱26与可动基部28连接的平行连杆30。
30.固定支柱24是从装置主体12的后端部的左右方向大致中央向上方向立起设置的柱状的构件。固定支柱24固定设置于装置主体12。另外,固定支柱24不是运动机构因此不运动。
31.旋转支柱26是沿上下方向伸长的柱状的构件。旋转支柱26与固定支柱24的上侧连接。详细而言,旋转支柱26的下端与固定支柱24的上端连接。在此,相对于固定支柱24(即装置主体12),旋转支柱26能够旋转地连接。具体而言,旋转支柱26能够以旋转轴ax1为中心在水平面内旋转地连接,该旋转轴ax1作为从载置台18(即操作面板16)分离并沿铅垂方向延伸的第一铅垂轴。
32.可动基部28是具有大致长方体的形状的构件。具体而言,可动基部28构成为包括:箱部28a,其具有长方体的形状;以及滑动板28b,其是在箱部28a的紧上方设置为水平的板状构件。滑动板28b以能够相对于箱部28a沿前后方向移动(滑动)的方式与箱部28a连接。在图2中,示出滑动板28b位于最后侧的状态,在该状态下,滑动板28b正好覆盖箱部28a的上侧面。
33.相对于滑动板28b,载置台18能够在水平面内旋转地连接。具体而言,载置台18能够以旋转轴ax2为中心在水平面内旋转地连接,该旋转轴ax2作为在比上述的旋转轴ax1接近载置台18(即操作面板16)的位置沿铅垂方向延伸的第二铅垂轴。
34.平行连杆30构成为包括是细长形状的构件且平行地设置的两个连杆30a以及30b。平行连杆30的一端与旋转支柱26连接,从一端沿水平方向分离的另一端与可动基部28的后端部的左右方向大致中央连接。由此,可动基部28支承于从旋转支柱26沿水平方向分离的
位置。平行连杆30相对于旋转支柱26能够在垂直面内在规定的角度范围内旋转地连接,同样地,相对于可动基部28能够在垂直面内在规定的角度范围内旋转地连接。通过平行连杆30相对于旋转支柱26在垂直面内进行旋转运动,从而可动基部28上下运动。即,可动基部28的高度位置变更。另外,伴随于此,平行连杆30相对于可动基部28在垂直面内旋转,从而在使可动基部28的高度位置变更时,可动基部28(特别是滑动板28b)的姿态保持为水平。
35.可动支承机构20所具有的上述各部具有层级结构。即,载置台18(即操作面板16)能够相对于滑动板28b以旋转轴ax2为中心进行旋转运动,但由于滑动板28b自身前后运动,因此通过滑动板28b前后运动,从而载置台18也前后运动。另外,包括滑动板28b的可动基部28通过平行连杆30的旋转运动而上下运动,因此通过平行连杆30进行旋转运动,从而滑动板28b以及载置台18也上下运动。并且,平行连杆30通过旋转支柱26的以旋转轴ax1为中心的旋转运动而在水平面内进行旋转运动,因此通过旋转支柱26进行旋转运动,从而平行连杆30、滑动板28b以及载置台18也在水平面进行旋转运动。
36.这样,在本实施方式的可动支承机构20中,平行连杆30作为进行对操作面板16的高度位置进行变更的上下运动的上下运动机构而发挥功能,旋转支柱26作为进行使操作面板16以旋转轴ax1为中心在水平面内旋转的第一旋转运动的第一旋转运动机构而发挥功能,载置台18作为进行使操作面板16以旋转轴ax2为中心在水平面内旋转的第二旋转运动的第二旋转运动机构而发挥功能,滑动板28b作为进行将操作面板16的前后位置变更的前后运动的前后运动机构而发挥功能。
37.在可动支承机构20中,旋转支柱26的旋转轴ax1从操作面板16分离,因此操作面板16通过第一旋转运动而在以旋转轴ax1为中心的直径比较大的圆周上移动。另一方面,载置台18的旋转轴ax2处于比旋转轴ax1接近操作面板16的位置(其中也包括旋转轴ax2穿过操作面板16的情况),因此主要通过第二旋转运动而变更操作面板16的朝向。
38.以下,对各运动机构的详细情况以及在各运动机构分别设置的锁定机构进行说明。
39.上下运动机构是上述的平行连杆30,且在平行连杆30设置有对其垂直面上的旋转运动进行支承的气弹簧32。在图3中示出气弹簧32的侧视图。气弹簧32构成为包括:工作缸32a,其被密闭且在内部填充有压缩气体;以及杆32b,其插入到工作缸32a。在工作缸32a内的压缩气体的反作用力的作用下,力向从工作缸32a延伸突出的方向作用于杆32b,由此发挥弹簧功能。通过该弹簧功能,而支承平行连杆30的旋转运动、特别是抬升可动基部28的位置的情况下的旋转运动。
40.气弹簧32是具有锁定部32c的带锁的气弹簧。锁定部32c发挥对杆32b相对于工作缸32a的插入以及延伸突出进行限制的锁定功能。当杆32b的移动被锁定部32c限制时,平行连杆30的旋转运动被限制。换句话说,气弹簧32发挥作为上下锁定机构的功能。
41.在锁定部32c连接有缆线wa。详细情况在后叙述,但缆线wa朝向操作部22(参照图1或者图2)延伸。当缆线wa被(向图3中的右下方向)拉拽时,锁定部32c的锁定功能被解除,且杆32b的移动的限制被解除,即平行连杆30的旋转运动的限制被解除。在锁定部32c设置有通过弹簧等而对锁定部32c附加向图3中的左上方向施力的作用力的机构,在未对缆线wa施加拉拽力的情况下,在该作用力的作用下锁定部32c的锁定功能有效,杆32b的移动被限制,即平行连杆30的旋转运动被限制。需要说明的是,锁定部32c成为二级杠杆结构,通过变更
该二级杠杆结构的杠杆比,能够降低锁定解除所需的拉拽缆线wa的力。
42.图4是固定支柱24与作为第一旋转运动机构的旋转支柱26的连接部的仰视图。在图4中,固定支柱24的图示除了一部分以外被省略。
43.在固定支柱24的上侧面设置有从该上侧面向上方向突出的圆筒形状的定子24a。另一方面,在旋转支柱26的下侧面设置有从该下侧面向下方向突出的同样为圆筒形状的转子26a。转子26a的内径比定子24a的外径稍大。通过定子24a嵌合于转子26a,从而旋转支柱26相对于固定支柱24能够以旋转轴ax1(定子24a以及转子26a的圆筒中心线)为中心旋转地连接。具体而言,当旋转支柱26旋转时,转子26a绕定子24a旋转。
44.在转子26a的侧面设置有沿着圆周方向排列的多个第一锁定孔26aa。
45.在转子26a的侧方设置有第一锁定销34。第一锁定销34具有沿转子26a的径向伸长的细长形状,且能够沿着转子26a的径向移动。由此,第一锁定销34的前端能够嵌合于在转子26a的侧面设置的第一锁定孔26aa。在图4中,示出了第一锁定销34嵌合于第一锁定孔26aa的状态。通过在第一锁定孔26aa嵌合第一锁定销34,从而限制转子26a(即旋转支柱26)的旋转运动。即,第一锁定孔26aa以及第一锁定销34发挥作为第一旋转锁定机构的功能。在转子26a的侧面沿着圆周方向设置有多个第一锁定孔26aa,从而能够将旋转支柱26在多个旋转位置(姿态)锁定。
46.第一锁定销34的基端(与转子26a相反的一侧的端部)与第一转接构件36的销连接部36a连接。在本实施方式中,销连接部36a成为第一转接构件36的一端。第一转接构件36具有沿水平方向伸长的形状,且以能够以沿铅垂方向延伸的旋转轴ax3为中心在水平面内旋转的方式安装于固定支柱24。另外,在第一转接构件36的缆线连接部36b连接有缆线wb。在本实施方式中,缆线连接部36b成为第一转接构件36的另一端。与缆线wa同样地,缆线wb也朝向操作部22延伸。缆线wb从定子24a(以及转子26a)的中央贯通孔进入旋转支柱26的内部并去往操作部22。
47.当缆线wb被向前方向(向图4中的右方向)拉拽时,第一转接构件36向图4中的逆时针旋转,即销连接部36a向后方向移动。由此,第一锁定销34向后方向、即从转子26a的中心离开的方向移动,第一锁定销34向第一锁定孔26aa的嵌合脱离,转子26a、即旋转支柱26的旋转运动的限制被解除。第一锁定销34被未图示的弹簧(spring)朝向转子26a的中心方向施力。因此,在未对缆线wb施加拉拽力的情况下,在该弹簧的作用力的作用下,第一锁定销34向转子26a的中心方向移动,第一锁定销34向第一锁定孔26aa嵌合,旋转支柱26的旋转运动被限制。
48.优选为,第一锁定孔26aa的侧壁具有以使孔径朝向开口逐渐变大的方式倾斜的侧壁倾斜部分,且与此相应地,第一锁定销34的前端的侧面具有以使直径从前端朝向基端逐渐变大的方式倾斜的锥部34a。在嵌合状态下,第一锁定销34的锥部34a与第一锁定孔26aa的侧壁倾斜部分对置。由此,在第一锁定销34的前端从第一锁定孔26aa脱出时,能够减小第一锁定销34的侧面与第一锁定孔26aa的侧壁之间的摩擦力。进而,降低将第一旋转运动的锁定解除所需的缆线wb的拉拽力。另外,第一锁定孔26aa的侧壁倾斜部分以及第一锁定销34的锥部34a也起到对锁定时的旋转支柱26相对于固定支柱24的晃动进行抑制这样的效果。由此,操作面板16的晃动也被抑制,操作面板16的操作性提升。
49.在第一锁定销34设置有锥部34a且在第一锁定孔26aa设置有侧壁倾斜部分的情况
下,当第一锁定销34进入了第一锁定孔26aa时,锥部34a与第一锁定孔26aa的侧壁倾斜部分触碰。此时,当通过操作员使旋转支柱26进行旋转运动时,从侧壁倾斜部分推压锥部34a,对第一锁定销34向从第一锁定孔26aa脱出的方向施加力。为了抑制该情况,也可以是,如图5所示,第一锁定孔26aa的侧壁具有设置于侧壁倾斜部分的近前侧和里侧、且以使孔径恒定的方式沿深度方向延伸的侧壁非倾斜部分,且第一锁定销34的侧面具有设置于锥部34a的基端侧和前端侧、且在嵌合状态下与侧壁非倾斜部分对置的笔直部34b。换言之,也可以在第一锁定销34的前端设置直径恒定、且以笔直部34b为侧面的笔直前端部分34c。由此,能够降低从第一锁定孔26aa施加于第一锁定销34的向从第一锁定孔26aa脱出的方向的力,而抑制第一锁定销34的脱出。
50.从降低将第一旋转运动的锁定解除所需的缆线wb的拉拽力的观点出发,在第一转接构件36中,也可以使从缆线连接部36b到旋转轴ax3的距离长于从销连接部36a到旋转轴ax3的距离。这样一来,利用杠杆的原理降低将第一旋转运动的锁定解除(使第一锁定销34移动)所需的缆线wb的拉拽力。
51.图6是示出可动基部28以及载置台18的一部分的立体图。在图6中,近前侧(左下侧)为后,里侧(右上侧)为前。
52.在滑动板28b的左右方向中央部的后侧部分设置有u型的切口28ba。并且,在切口28ba安装有固定构件28bb,该固定构件28bb设置有沿垂直方向延伸的俯视下为圆形的孔。另一方面,在载置台18的下侧面、详细而言在下侧面的左右方向大致中央的后端附近设置有从该下侧面向下方向突出的大致圆筒形状的转子18a。设置于固定构件28bb的孔的内径比转子18a的外径稍大。通过转子18a嵌合于固定构件28bb的孔,从而载置台18相对于滑动板28b能够以旋转轴ax2(固定构件28bb的孔以及转子18a的圆筒中心线)为中心旋转地连接。具体而言,当载置台18旋转时,插入到设置于固定构件28bb的孔的转子18a旋转。
53.转子18a具有从转子18a的上端向侧方突出的凸缘18aa。在俯视下,凸缘18aa的外边成为以旋转轴ax2为中心的圆弧,凸缘18aa成为拱形形状。在凸缘18aa设置有沿着以旋转轴ax2为中心的圆周方向排列的多个第二锁定孔18ab。
54.图7是示出转子18a与固定构件28bb的连接部、即载置台18与滑动板28b的连接部的侧面剖视图。在凸缘18aa的下方设置有第二锁定销38。第二锁定销38具有沿上下方向伸长的细长形状,且能够沿上下方向移动。由此,第二锁定销38的前端能够嵌合于在凸缘18aa设置的第二锁定孔18ab。在图7中,示出第二锁定销38嵌合于第二锁定孔18ab的状态。通过在第二锁定孔18ab嵌合第二锁定销38,从而限制转子18a(即载置台18)的旋转运动。即,第二锁定孔18ab以及第二锁定销38发挥作为第二旋转锁定机构的功能。通过设置有多个第二锁定孔18ab,能够将载置台18在多个旋转位置(姿态)锁定。
55.第二锁定销38的基端(与凸缘18aa相反的一侧的端部)与第二转接构件40的销连接部40a连接。在本实施方式中,销连接部40a成为第二转接构件40的一端。第二转接构件40具有在垂直面(yz平面)内向一方向伸长的形状,且以能够以沿水平方向(x轴方向;左右方向)延伸的旋转轴ax4为中心在垂直面内旋转的方式安装于固定构件28bb。换句话说,第二锁定销38以及第二转接构件40与滑动板28b(以及载置台18)的前后移动一起前后移动。另外,在第二转接构件40的缆线连接部40b连接有缆线wc。在本实施方式中,缆线连接部40b成为第二转接构件40的另一端。与缆线wa以及wb同样地,缆线wc也朝向操作部22延伸。缆线wc
穿过转子18a的中央贯通孔(以及固定构件28bb的孔)并去往设置于载置台18的操作部22。
56.当向上方向拉拽缆线wc时,第二转接构件40向图7中的顺时针旋转,即销连接部40a向下方向移动。由此,第二锁定销38向下方向、即从凸缘18aa离开的方向移动,第二锁定销38向第二锁定孔18ab的嵌合脱离,转子18a、即载置台18的旋转运动的限制被解除。第二锁定销38被弹簧42朝向上方向即凸缘18aa侧施力。因此,在未对缆线wc施加拉拽力的情况下,在弹簧42的作用力的作用下,第二锁定销38向上方向移动,第二锁定销38向第二锁定孔18ab嵌合,载置台18的旋转运动被限制。
57.优选为,第二锁定孔18ab的侧壁具有以使孔径朝向下侧开口逐渐变大的方式倾斜的侧壁倾斜部分,且与此相应地,第二锁定销38的前端的侧面具有以使直径从前端朝向基端逐渐变大的方式倾斜的锥部38a。在嵌合状态下,第二锁定销38的锥部38a与第二锁定孔18ab的侧壁倾斜部分对置。由此,在第二锁定销38的前端从第二锁定孔18ab脱出时,能够减小第二锁定销38的侧面与第二锁定孔18ab的侧壁之间的摩擦力。进而,降低将第二旋转运动的锁定解除所需的缆线wc的拉拽力。另外,第二锁定孔18ab的侧壁倾斜部分以及第二锁定销38的锥部38a也起到对锁定时的滑载置台18相对于滑动板28b的晃动进行抑制这样的效果。由此,操作面板16的晃动也被抑制,操作面板16的操作性提升。
58.另外,与第一锁定孔26aa同样地,第二锁定孔18ab的侧壁也可以具有设置于侧壁倾斜部分的近前侧和里侧、且以使孔径恒定的方式沿深度方向延伸的侧壁非倾斜部分,与第一锁定销34同样地,第二锁定销38的侧面也可以在锥部38a的基端侧和前端侧具有笔直部(参照图5)。
59.从降低将第二旋转运动的锁定解除所需的缆线wc的拉拽力的观点出发,在第二转接构件40中,也可以使从缆线连接部40b到旋转轴ax4的距离长于从销连接部40a到旋转轴ax4的距离。这样一来,利用杠杆的原理降低将第二旋转运动的锁定解除(使第二锁定销38移动)所需的缆线wc的拉拽力。
60.图8是可动基部28的俯视。在图8中下侧为后,上侧为前。在图8中省略了滑动板28b的图示,即,图8是箱部28a的俯视图。在箱部28a的内部的左右侧设置有沿前后方向伸长的导轨28c。在滑动板28b的下侧面的左右侧分别设置有沿前后方向伸长、且与导轨28c嵌合的槽(未图示)。通过滑动板28b的该槽嵌合于导轨28c,从而滑动板28b相对于箱部28a能够沿前后方向运动地连接。
61.图9是示出对滑动板28b的前后运动进行限制的前后锁定机构的立体图。在设置于箱部28a的导轨28c、详细而言在右侧(在图8中为左侧)的导轨28c的内侧(左侧(在图8为右侧))侧面设置有沿着前后方向排列的多个第三锁定孔28ca。
62.在设置有第三锁定孔28ca的导轨28c的、第三锁定孔28ca侧的侧方设置有第三锁定销44。第三锁定销44具有沿左右方向伸长的细长形状,且能够沿着左右方向移动。由此,第三锁定销44的前端能够嵌合于在导轨28c的侧面设置的第三锁定孔28ca。通过在第三锁定孔28ca嵌合第三锁定销44,从而限制滑动板28b的前后运动。即,第三锁定孔28ca以及第三锁定销44发挥作为前后锁定机构的功能。
63.第三锁定销44经由后述的第三转接构件46而与台座48连接。台座48安装于滑动板28b。换句话说,第三锁定销44、第三转接构件46以及台座48与滑动板28b成为一体而沿前后方向移动。通过在沿前后方向伸长的导轨28c的侧面设置有多个沿前后方向排列的第三锁
定孔28ca,能够将滑动板28b在多个位置锁定。
64.第三锁定销44的基端(与导轨28c相反的一侧的端部)与第三转接构件46的销连接部46a连接。第三转接构件46具有沿水平方向伸长的形状,且以能够以沿铅垂方向延伸的旋转轴ax5为中心在水平面内旋转的方式安装于台座48。另外,在第三转接构件46的缆线连接部46b连接有缆线wd。在本实施方式中,旋转轴ax5处于第三转接构件46的一端,缆线连接部46b处于第三转接构件46的另一端,销连接部46a处于旋转轴ax5与缆线连接部46b之间。
65.与缆线wa~wc同样地,缆线wd也朝向操作部22延伸。缆线wd与缆线wc同样地,穿过载置台18的转子18a的中央贯通孔(以及滑动板28b的固定构件28bb的孔)(参照图6)的中央贯通孔并去往设置于载置台18的操作部22。
66.当向左方向(图9中的右下方向)拉拽缆线wd时,第三转接构件46向图9中的顺时针旋转,即销连接部46a向左方向移动。由此,第三锁定销44向左方向、即从导轨28c分离的方向移动,第三锁定销44向第三锁定孔28ca的嵌合脱离,滑动板28b的前后运动的限制被解除。第三锁定销44被未图示的弹簧朝向导轨28c侧施力。因此,在未对缆线wd施加拉拽力的情况下,在该弹簧的作用力的作用下,第三锁定销44向导轨28c侧移动,第三锁定销44向第三锁定孔28ca嵌合,滑动板28b的前后运动被限制。
67.优选为,第三锁定孔28ca的侧壁具有以使孔径朝向开口逐渐变大的方式倾斜的侧壁倾斜部分,且与此相应地,第三锁定销44的前端的侧面具有以使直径从前端朝向基端逐渐变大的方式倾斜的锥部44a。在嵌合状态下,第三锁定销44的锥部44a与第三锁定孔28ca的侧壁倾斜部分对置。由此,在第三锁定销44的前端从第三锁定孔28ca脱出时,能够减小第三锁定销44的侧面与第三锁定孔28ca的侧壁之间的摩擦力。进而,降低将前后运动的锁定解除所需的缆线wd的拉拽力。另外,第三锁定孔28ca的侧壁倾斜部分以及第三锁定销44的锥部38a也起到对锁定时的滑动板28b相对于箱部28a的晃动进行抑制这样的效果。由此,操作面板16的晃动也被抑制,操作面板16的操作性提升。
68.另外,与第一锁定孔26aa同样地,第三锁定孔28ca的侧壁也可以具有设置于侧壁倾斜部分的近前侧和里侧、且以使孔径恒定的方式沿深度方向延伸的侧壁非倾斜部分,与第一锁定销34同样地,第三锁定销44的侧面也可以在锥部44a的基端侧和前端侧具有笔直部(参照图5)。
69.另外,在本实施方式中,从缆线连接部46b到旋转轴ax5的距离长于从销连接部46a到旋转轴ax5的距离,因此利用杠杆的原理降低将前后运动的锁定解除(使第三锁定销44移动)所需的缆线wd的拉拽力。
70.可动支承机构20所包括的各运动机构以及在各运动机构分别设置的锁定机构的详细情况如以上那样。在图10示出从各锁定机构朝向载置台18的操作部22延伸的缆线wa~wd的回绕路径。
71.从作为上下锁定机构的气弹簧32的锁定部32c延伸的缆线wa在图10中由实线表示。缆线wa从锁定部32c穿过平行连杆30的内部而进入可动基部28的箱部28a,并从箱部28a穿过载置台18的转子18a的中央贯通孔而进入载置台18。
72.从连接有作为第一旋转锁定机构的第一锁定销34的第一转接构件36延伸的缆线wb在图10中由虚线表示。缆线wb从第一转接构件36穿过固定支柱24的定子24a的中央贯通孔而进入平行连杆30的内部,并穿过平行连杆30而进入可动基部28的箱部28a,且从箱部
28a穿过载置台18的转子18a的中央贯通孔而进入载置台18。
73.从连接有作为第二旋转锁定机构的第二锁定销38的第二转接构件40延伸的缆线wc在图10中由单点划线表示。缆线wc从第二转接构件40穿过载置台18的转子18a的中央贯通孔而进入载置台18。
74.从连接有作为前后锁定机构的第三锁定销44的第三转接构件46延伸的缆线wd在图10中由双点划线表示。缆线wd从第三转接构件46穿过载置台18的转子18a的中央贯通孔而进入载置台18。
75.这样,缆线wa~wd以几乎不向可动支承机构20的外部露出的方式穿过可动支承机构20的内部而回绕。
76.如图8所示,在箱部28a的内部设置有缆线贯穿路28d,该缆线贯穿路28d为筒状,在俯视下弯曲为u状,且在两端部具有朝向后侧的开口28da。在缆线贯穿路28d中贯穿缆线wa以及wb。如上述那样,缆线wa以及wb穿过载置台18的转子18a的中央贯通孔而进入载置台18,且转子18a与滑动板28b一起进行前后运动。换句话说,伴随着滑动板28b的前后运动,缆线wa以及wb的回绕路径变动。于是,由于与滑动板28b的前后运动相伴的缆线wa以及wb的回绕路径的变动,而使缆线wa以及wb钩挂于某处、或者难以通过操作部22的操作来拉拽,为了抑制该情况,通过使缆线wa以及wb贯穿缆线贯穿路28d,从而使缆线wa以及wb具有余长部。另外,根据弯曲为u状的缆线贯穿路28d,即使滑动板28b进行前后运动,也能够将缆线wa以及wb的弯曲半径维持为相同。由此,能够抑制缆线wa以及wb的缆线阻力的变动,从而抑制用于操作缆线wa以及wb的力、或者锁定解除所需的缆线wa以及wb的移动量与滑动板28b进行前后运动相应地变动的情况。
77.需要说明的是,缆线wc以及wd也穿过转子18a而进入载置台18,但连接有缆线wc的第二转接构件40以及连接有缆线wd的第三转接构件46与滑动板28b(即转子18a)一起进行前后运动。因此,即使转子18a进行前后运动,转子18a与第二转接构件40以及第三转接构件46的相对的位置关系也不变动,缆线wc以及wd的回绕路径不怎么变动,因此不使缆线wc以及wd贯穿缆线贯穿路28d。
78.在本实施方式中,缆线wa~wd与设置于载置台18的缆线转接机构50连接。图11是载置台18的俯视图,且是示出缆线转接机构50和操作部22的图。在图11中,除了缆线转接机构50、操作部22以及与它们相关的构件以外的图示被省略。
79.缆线转接机构50构成为包括固定于载置台18的基部50a以及能够相对于基部50a沿前后方向移动的可动部50b。作为缆线的第一部分的缆线wa~wd与可动部50b的后端部50ba连接。由此,气弹簧32的锁定部32c(参照图3)与可动部50b由缆线wa连接,第一转接构件36(参照图4)与可动部50b由缆线wb连接,第二转接构件40(参照图7)与可动部50b由缆线wc连接,第三转接构件46(参照图9)与可动部50b由缆线wd连接。
80.在可动部50b的前端部50bb连接有作为缆线的第二部分的缆线we,缆线we朝向前方向延伸,并被带轮52将其延伸方向变换为右且稍靠后的方向,且与操作部22连接。
81.操作部22由操作员进行操作,以变更各锁定机构的限制状态。操作部22设置于为了使操作员抓住载置台18而沿着载置台18的前端设置的、左右延伸的抓手54的附近。在本实施方式中,在抓手54的左右方向中央部设置有放置操作员的手臂或者手臂附近的掌托56(在图11中掌托56的罩未图示,示出了其内部),操作部22的一部分设置为位于掌托56的下
侧。
82.在本实施方式中,操作部22具有将沿左右方向伸长的长边部分与从长边部分的左侧端部向前后方向伸长的短边部分组合而得到的俯视下为l型的形状。长边部分的右侧部分从掌托56的下部向右侧突出,且向外侧空间露出。该突出部分是由操作员施加力的输入部22a。供来自缆线转接机构50(可动部50b)的缆线we连接的缆线连接部22b位于长边部分的左侧端部的后端部。操作部22以能够以位于短边部分的前侧端的沿铅垂方向延伸的操作部旋转轴ax6为中心旋转的方式安装于载置台18。通过由操作员对输入部22a施加力(具体而言向前方向的力),从而操作部22以操作部旋转轴ax6为中心在水平面内在俯视下顺时针旋转。
83.当操作部22旋转时,缆线连接部22b向右侧移动,缆线we被向右方向拉拽,由带轮52从缆线we对可动部50b施加前方向的力,使可动部50b向前方向移动。由此,连接于可动部50b缆线wa~wd被向前方向拉拽。当缆线wa~wd被向前方向拉拽时,如上述那样,通过缆线wa~wd的作用而解除各锁定机构的限制状态(锁定状态)。
84.在操作部22中,操作部旋转轴ax6与缆线连接部22b之间的距离l1短于操作部旋转轴ax6与输入部22a(操作员能够施加力的最接近操作部旋转轴ax6的点)之间的距离l2。由此,利用杠杆的原理降低为了将各锁定机构的限制状态解除而需要输入输入部22a的力。
85.当操作员将手从操作部22拿开时,即当停止向输入部22a的力的输入时,在设置于各锁定机构的弹簧的作用力的作用下,缆线wa~wd被向后方向拉拽。由此,形成各锁定机构的限制状态。
86.这样,根据本实施方式,能够通过对一个操作部22进行的操作,来变更对操作面板16的上下运动进行限制的上下锁定机构、对以从操作面板16分离且沿铅垂方向延伸的旋转轴ax1为中心的操作面板16的第一旋转运动进行限制的第一旋转锁定机构、对以在比旋转轴ax1接近操作面板16的位置沿铅垂方向延伸的旋转轴ax2为中心的操作面板16的第二旋转运动进行限制的第二旋转锁定机构、以及对操作面板16的前后运动进行限制的前后锁定机构这四个锁定机构的限制状态。并且,它们全部基于缆线wa~we的作用,因此不使用马达等电动部件。
87.在通过对一个操作部的操作而利用缆线的作用来变更多个锁定机构的限制状态的情况下,考虑必须向操作部输入较大的力的情况。特别是,在超声波诊断装置中,考虑到操作员单手拿超声波探测器的情况较多,从而必须用另一只手对操作部进行操作的情况较多。换句话说,只能向操作部输入操作员的握力程度的力的情况较多。对于该点,在本实施方式中,在各锁定机构中,进行了降低将锁定机构的限制状态解除所需的力的设计,因此操作员需要向操作部22输入的力降低。
88.图12是示出操作部以及缆线转接机构的变形例的图。在图12中,除了操作部60、缆线转接机构62以及与它们相关的构件以外的图示也被省略。
89.变形例的操作部60具有沿左右方向伸长的形状。操作部60的右侧部分从掌托56的下部向右侧突出而露出于外侧空间。并且操作部60的左侧部分也从掌托56的下部向左侧突出而露出于外侧空间。该左右的突出部分是由操作员施加力的输入部60a。在变形例中,操作员能够两手把持左右的输入部60a而进行操作。另外,操作员能够对左右的输入部60a中的任一方施加向前方向的力。例如,在操作员以单手拿超声波探测器的情况下,用另一只手
对输入部60a进行操作,但在该情况下,能够对左右的输入部60a中的容易操作的一方进行操作。供来自缆线转接机构62的缆线we连接的缆线连接部60b位于操作部60的左右方向的大致中央。由于对输入部60a施加向前方向的力,而使操作部60的整体向前方向移动。
90.在变形例中,缆线转接机构62也构成为包括固定于载置台18的基部62a以及能够相对于基部62a前后移动的可动部62b。缆线wa~wd与可动部62b的后端部62ba连接。
91.在变形例中,在可动部62b的前端部连接有沿左右方向伸长的第四转接构件62c的可动部连接部62ca。第四转接构件62c以能够以处于其左侧端部的旋转轴ax7为中心旋转的方式安装于基部62a。在第四转接构件62c的处于右侧端部的缆线连接部62cb连接有来自操作部60的缆线we。即,可动部连接部62ca位于旋转轴ax7与缆线连接部62cb之间。
92.当缆线we被向前方向拉拽时,第四转接构件62c向图12中的顺时针旋转,即可动部连接部62ca向前方向移动。由此,可动部62b向前方向移动,与可动部62b连接的缆线wa~wd被向前方向拉拽。当缆线wa~wd被向前方向拉拽时,如上述那样,通过缆线wa~wd的作用,而解除各锁定机构的限制状态(锁定状态)。
93.在变形例中,操作部60进行平行移动,因此不能在操作部60中进行降低将各锁定机构的限制状态解除所需的力的设计。因此,在变形例中,利用缆线转接机构62的第四转接构件62c来降低将各锁定机构的限制状态解除所需的力。即,通过在第四转接构件62c中,使从缆线连接部62cb到旋转轴ax7的距离长于从可动部连接部62ca到旋转轴ax7的距离,从而利用杠杆的原理降低将各锁定机构的限制状态解除所需的缆线we的拉拽力。
94.需要说明的是,在变形例中使用的第四转接构件62c也可以在图11所示的基本实施方式的缆线转接机构50中应用。
95.以上,对本发明的超声波诊断装置的实施方式进行了说明,但本发明的超声波诊断装置并不限于上述实施方式,只要不脱离本发明的主旨,则能够进行各种变更。
96.例如,在本实施方式中,作为进行操作面板16的上下运动的上下运动机构,使用了平行连杆30,但例如也可以使旋转支柱26能够沿着固定支柱24上下运动,并将旋转支柱26作为上下运动机构。旋转支柱26与可动基部28由不运动的臂构件等连接。在该情况下,作为对该上下运动机构的上下运动进行限制的上下锁定机构,也能够使用气弹簧32。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。