1.本发明属于手术机器人指令传感技术领域,特别是涉及一种外科手术机器人手部指令传感装置。
背景技术:
2.外科手术机器人是一种集临床医学、生物力学、机械学、材料学、计算机科学、微电子学、机电一体化等诸多学科为一体的新型医疗器械,是当前医疗器械信息化、程控化、智能化的一个重要发展方向,在临床微创手术以及战地救护、地震海啸救灾等方面有着广泛的应用前景,现有外科手术机器人通过将手指套入传感之套内进行操作,指令传感装置握持较为不便,且同时只能够控制两个与外科手术机器人连接的手术器械,当需要对其余手术器械进行控制时需要进行切换,操作较为不便。
技术实现要素:
3.本发明的目的在于提供一种外科手术机器人手部指令传感装置,以解决现有的问题:外科手术机器人通过将手指套入传感之套内进行操作,指令传感装置握持较为不便,且同时只能够控制两个与外科手术机器人连接的手术器械,当需要对其余手术器械进行控制时需要进行切换,操作较为不便。
4.为解决上述技术问题,本发明是通过以下技术方案实现的:一种外科手术机器人手部指令传感装置,包括传感机构,所述传感机构包括有传感转轴,所述传感转轴的一端安装有指令传感握把,所述指令传感握把的内部安装有可同时控制两个机械手的同步操作组件,所述指令传感握把的内部还安装有用于调节指部按压受力的压力调节组件。
5.进一步地,所述同步操作组件包括有第一夹紧推杆、第二夹紧推杆、第一握块、第二握块、第一推板、第一红外传感接收器、第二推板、第二红外传感接收器、红外传感发射器与复位弹簧,所述第一夹紧推杆与第二夹紧推杆安装在指令传感握把的一端面,且所述第一夹紧推杆和第二夹紧推杆均与指令传感握把滑动连接,所述第一夹紧推杆的一端固定有第一握块,所述第一夹紧推杆的另一端固定有第一推板,所述第一推板一端的中部固定有第一红外传感接收器,所述第二夹紧推杆的一端固定有第二握块,且所述第一握块与第二握块滑动连接,所述第二夹紧推杆的另一端固定有第二推板,所述第二推板的一端的中部固定有第二红外传感接收器,所述红外传感发射器安装在指令传感握把的内部,且所述红外传感发射器位于与第一红外传感接收器和第二红外传感接收器对应的位置,所述复位弹簧安装在指令传感握把的内部,且所述复位弹簧位于第一推板和第二推板的一端。
6.进一步地,所述压力调节组件包括有压力调节板、调节螺纹柱、压力调节马达、第一控制按钮与第二控制按钮,所述压力调节板位于指令传感握把的内部,所述压力调节板位于复位弹簧远离第一推板和第二推板的一端,且所述压力调节板与指令传感握把滑动连接,所述压力调节板由三个圆形板组成,且三个所述圆形板通过两个方形条连接在一起,位于上端与下端的两个所述圆形板之间开设有圆孔,位于中部的所述圆形板的内侧螺纹连接
有调节螺纹柱,所述调节螺纹柱与指令传感握把转动连接,所述压力调节马达固定在靠近第一握块的一端面,所述压力调节马达的输出端与调节螺纹柱连接,所述第一握块的一侧面安装有第一控制按钮,所述第二握块的一侧面安装有第二控制按钮,所述第一控制按钮与第二控制按钮均与压力调节马达电性连接。
7.进一步地,所述传感机构还包括有第一传感架、第二传感架和第三传感架,所述第一传感架、第二传感架和第三传感架均为l形,所述第一传感架位于上方的一端与第二传感架位于上方的一端转动连接,所述第二传感架位于下方的一端与第三传感架位于下方的一端转动连接,所述第三传感架位于上方的一端与传感转轴转动连接,且所述第一传感架与第二传感架、第二传感架与第三传感架、第三传感架与传感转轴的连接处均设置有用于检测转动扭矩的传感器。
8.进一步地,所述指令传感握把一端面的上方安装有第一限位柱套,所述指令传感握把一端面的下方安装有第二限位柱套,所述第一夹紧推杆位于第一限位柱套的内侧,且所述第一夹紧推杆与第一限位柱套滑动连接,所述第二夹紧推杆位于第二限位柱套的内侧,且所述第二夹紧推杆与第二限位柱套滑动连接。
9.进一步地,所述第一握块底端的中部固定有导向限位滑条,所述第二握块顶端的中部开设有导向限位滑槽,所述第二握块与导向限位滑槽的横切面形状均为t形,且所述导向限位滑条位于导向限位滑槽内部,所述第一握块与第二握块通过导向限位滑条和导向限位滑槽配合滑动连接。
10.所述第一握块与第二握块的一侧面均设置有握持凹槽,且所述握持凹槽内设置有软垫
11.所述指令传感握把的一端面且位于压力调节马达的外侧设置有防护外壳
12.所述指令传感握把的形状为l形
13.本发明具有以下有益效果:
14.1、本发明通过对结构设计,使得装置在操作机器人时能够同时单手同时控制两个手术器械的开合,无需不断切换手术器械的控制,手术操作更加方便快捷。
15.2、本发明通过对结构设计,能够通过推动压力调节板在指令传感握把内移动,挤压复位弹簧收缩,进而能够调节推动第一握块和第二握块所需的力量,进而能够根据每位医生自身习惯进行调节。
附图说明
16.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明一种外科手术机器人手部指令传感装置的结构示意图;
18.图2为本发明一种外科手术机器人手部指令传感装置的角度旋转结构示意图;
19.图3为本发明一种外科手术机器人手部指令传感装置传感机构的结构示意图;
20.图4为本发明一种外科手术机器人手部指令传感装置指令传感握把上的结构示意图;
21.图5为本发明一种外科手术机器人手部指令传感装置按压第二握块的结构示意图;
22.图6为本发明一种外科手术机器人手部指令传感装置指令传感握把的剖面图;
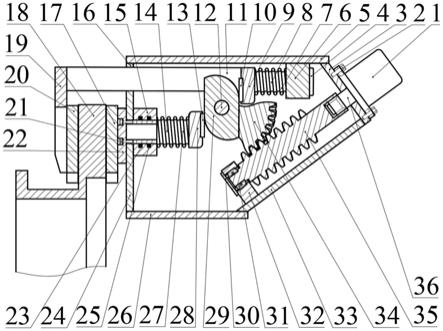
23.图7为本发明一种外科手术机器人手部指令传感装置的局部剖面图。
24.附图中,各标号所代表的部件列表如下:
25.1、传感机构;2、指令传感握把;3、第一传感架;4、第二传感架;5、第三传感架;6、传感转轴;7、第一限位柱套;8、第二限位柱套;9、第一夹紧推杆;10、第二夹紧推杆;11、第一握块;12、第二握块;13、导向限位滑条;14、导向限位滑槽;15、第一推板;16、第一红外传感接收器;17、第二推板;18、第二红外传感接收器;19、红外传感发射器;20、复位弹簧;21、压力调节板;22、调节螺纹柱;23、压力调节马达;24、防护外壳;25、第一控制按钮;26、第二控制按钮。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
27.请参阅图1-7所示,本发明为一种外科手术机器人手部指令传感装置,包括传感机构1,传感机构1与外科手术机器人的机械臂连接,且连接处安装有传感器,传感机构1包括有第一传感架3、第二传感架4、第三传感架5和传感转轴6,第一传感架3、第二传感架4和第三传感架5均为l形,第一传感架3位于上方的一端与第二传感架4位于上方的一端转动连接,第二传感架4位于下方的一端与第三传感架5位于下方的一端转动连接,第三传感架5位于上方的一端与传感转轴6转动连接,且第一传感架3与第二传感架4、第二传感架4与第三传感架5、第三传感架5与传感转轴6的连接处均设置有用于检测转动扭矩的传感器,传感机构1整体产生角度偏转时,能够通过其内设置的传感器检测各部件间的旋转角度,将检测所得数据反馈至至外科手术机器人的控制系统,进而控制外科手术机器人的动作;
28.进一步地,传感转轴6的一端安装有指令传感握把2,指令传感握把2的形状为l形,l形的指令传感握把2能够更加方便操作时进行握持,对比传统的指套式操作结构更加便于操作,指令传感握把2的内部安装有可同时控制两个机械手的同步操作组件;
29.具体的,同步操作组件包括有第一夹紧推杆9、第二夹紧推杆10、第一握块11、第二握块12、第一推板15、第一红外传感接收器16、第二推板17、第二红外传感接收器18、红外传感发射器19与复位弹簧20,第一夹紧推杆9与第二夹紧推杆10安装在指令传感握把2的一端面,且第一夹紧推杆9和第二夹紧推杆10均与指令传感握把2滑动连接,指令传感握把2一端面的上方安装有第一限位柱套7,指令传感握把2一端面的下方安装有第二限位柱套8,第一夹紧推杆9位于第一限位柱套7的内侧,且第一夹紧推杆9与第一限位柱套7滑动连接,第二夹紧推杆10位于第二限位柱套8的内侧,且第二夹紧推杆10与第二限位柱套8滑动连接,通过第一限位柱套7和第二限位柱套8能够对第一夹紧推杆9和第二夹紧推杆10进行限位,避免在操作时第一夹紧推杆9和第二夹紧推杆10产生角度偏转;
30.进一步地,第一夹紧推杆9的一端固定有第一握块11,第一夹紧推杆9的另一端固
定有第一推板15,第一推板15一端的中部固定有第一红外传感接收器16,第二夹紧推杆10的一端固定有第二握块12,第一握块11与第二握块12的一侧面均设置有握持凹槽,且握持凹槽内设置有软垫,且第一握块11与第二握块12滑动连接,第一握块11底端的中部固定有导向限位滑条13,第二握块12顶端的中部开设有导向限位滑槽14,第二握块12与导向限位滑槽14的横切面形状均为t形,且导向限位滑条13位于导向限位滑槽14内部,第一握块11与第二握块12通过导向限位滑条13和导向限位滑槽14配合滑动连接,能够对第一握块11和第二握块12进行限位,避免在秃顶第一握块11和第二握块12时第一夹紧推杆9和第二夹紧推杆10产生旋转;
31.进一步地,第二夹紧推杆10的另一端固定有第二推板17,第二推板17的一端的中部固定有第二红外传感接收器18,红外传感发射器19安装在指令传感握把2的内部,且红外传感发射器19位于与第一红外传感接收器16和第二红外传感接收器18对应的位置,通过推动第一握块11和第二握块12能够带动第一红外传感接收器16和第二红外传感接收器18移动,当第一红外传感接收器16和第二红外传感接收器18移动的同时能够缩短第一红外传感接收器16和第二红外传感接收器18距离复位弹簧20之间的间距,当此间距距离产生改变时,将数据反馈至外科手术机器人的控制系统,进而能够控制安装在外科手术机器人上的手术器械的开合,且单独推动第一握块11或第二握块12均可控制一个手术器械的开合,进而使得在手术进行时可同时控制四个手术器械,手术途中无需切换手术器械的控制,操作更加方便,效果更好,复位弹簧20安装在指令传感握把2的内部,且复位弹簧20位于第一推板15和第二推板17的一端,在按压第一握块11和第二握块12后能够推动复位弹簧20收缩,当松动第一握块11和第二握块12后,第一握块11和第二握块12在复位弹簧20的作用下收回,增加第一红外传感接收器16和第二红外传感接收器18距离复位弹簧20的间距,使得手术器械松开;
32.进一步地,指令传感握把2的内部还安装有用于调节指部按压受力的压力调节组件。
33.具体的,压力调节组件包括有压力调节板21、调节螺纹柱22、压力调节马达23、第一控制按钮25与第二控制按钮26,压力调节板21位于指令传感握把2的内部,压力调节板21位于复位弹簧20远离第一推板15和第二推板17的一端,且压力调节板21与指令传感握把2滑动连接,压力调节板21由三个圆形板组成,且三个圆形板通过两个方形条连接在一起,位于上端与下端的两个圆形板之间开设有圆孔,位于中部的圆形板的内侧螺纹连接有调节螺纹柱22,调节螺纹柱22与指令传感握把2转动连接,压力调节马达23固定在靠近第一握块11的一端面,压力调节马达23的输出端与调节螺纹柱22连接,指令传感握把2的一端面且位于压力调节马达23的外侧设置有防护外壳24,通过防护外壳24能够对压力调节马达23起到保护的作用;
34.进一步地,第一握块11的一侧面安装有第一控制按钮25,第二握块12的一侧面安装有第二控制按钮26,第一控制按钮25与第二控制按钮26均与压力调节马达23电性连接,通过按压第一控制按钮25能够带动调节螺纹柱22顺时针旋转,调节螺纹柱22旋转时能够在螺纹的作用下带动压力调节板21进行平移,推动复位弹簧20收缩,能够增加按压第一握块11和第二握块12所需的力量,当需要降低按压第一握块11和第二握块12所需的力量时,通过按压第二控制按钮26,控制压力调节马达23带动调节螺纹柱22逆时针旋转,带动压力调
节板21平移,使得复位弹簧20弹回,降低按压第一握块11和第二握块12所需的力量,更加便于不同医生的操作。
35.本实施例的一个具体应用为:在进行操作时,首先握持在指令传感握把2上用手指按压第一握块11和第二握块12测试,如若需要对按压所需力量进行调节时,可通过按压第一控制按钮25或第二控制按钮26,控制压力调节马达23带动调节螺纹柱22进行顺时针或逆时针的旋转,能够带动压力调节板21进行平移,进而控制复位弹簧20的收缩程度,调节按压第一握块11和第二握块12所需力量,当进行手术时,通过推拉指令传感握把2能够带动传感机构1整体进行角度调节,能够通过其内设置的传感器检测各部件间的旋转角度,将检测所得数据反馈至至外科手术机器人的控制系统,进而控制外科手术机器人的动作,在手术中通过手指按压第一握块11和第二握块12,能够推动第一推板15和第二推板17进行移动,调节第一红外传感接收器16和第二红外传感接收器18的位置,当第一红外传感接收器16和第二红外传感接收器18移动的同时能够缩短第一红外传感接收器16和第二红外传感接收器18距离复位弹簧20之间的间距,当此间距距离产生改变时,将数据反馈至外科手术机器人的控制系统,进而能够控制安装在外科手术机器人上的手术器械的开合,且单独推动第一握块11或第二握块12均可控制一个手术器械的开合,进而使得在手术进行时可同时控制四个手术器械,手术途中无需切换手术器械的控制,操作更加方便,效果更好。
36.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
37.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。