一种头尾形状不同的细长零件同向输出装置
【技术领域】
1.本发明涉及自动控制技术领域,具体涉及一种头尾形状不同的细长零件同向输出装置。
背景技术:
2.中国是制造业大国,小零件占据了全球市场的大部分份额,在劳动力短缺的时代,人力密集型的小零件加工成为了行业的瓶颈,自动化 智能化的技术及装备是解决细间距、高精度插装的发展方向。机械、电子等行业小尺寸零部件(如:五金件)在装配过程中通常需要满足单一方向的装配要求,目前,针对螺钉的同向输出技术已经成熟,得到了广泛地应用。对于不同类型的,机械、电子、军工等行业细长机械零部件的大批量装配,同向输出仍然是一个难题,其技术核心在于当细长机械零部件的形状与重量不容易区分时,如何识别小零件的头部和尾部,实现换向输出和相同方向传送。
3.气缸是引导活塞在缸内进行直线往复运动的圆筒形金属机件。在非标自动化设备中常用的驱动方式有两种:气缸驱动和电机驱动。运动机构要是每次行走固定距离时,一般选用气功驱动;运动机构每次行走的距离不固定或者多次行走或者行走的精度非常高时,一般选择电机驱动。气缸有标准气缸、薄型气缸、三轴气缸(有两根导杆,气缸可以承受径向力)、气动手指、无杆气缸、旋转气缸、笔形气缸、气动滑台等。
4.本发明对机械、电子、军工等行业细长机械零部件的单一方向传送作了技术改进。
技术实现要素:
5.本发明的目的是,提供一种无方向输入、单方向输出,双通道输入、单通道输出的细长机械零部件同向输出装置。
6.为实现上述目的,本发明采取的技术方案是一种头尾形状不同的细长零件同向输出装置,包括用于检测识别细长零件头部和尾部方向并控制细长零件同向输出的检测识别模块、用于实现细长零件的单一方向运动输出的双通道同向输出模块和用于实现双通道同向输出细长零件汇流进入单通道传送的防逆流的汇流模块。
7.进一步地,所述双通道同向输出模块包括用于连接外部上料机的入口通道,位于所述入口通道第一侧的第一出口通道、第一气缸、第一滑块,以及位于所述入口通道第二侧的第二出口通道、第二气缸、第二滑块,所述第一气缸用于推动第一滑块作往复运动,所述第二气缸用于推动第二滑块作往复运动,所述第一出口通道和第二出口通道传送方向的夹角为180
°
;所述防逆流的汇流模块包括汇流管、从汇流管引出连接第一出口通道的第一支流管和连接第二出口通道的第二支流管、从第一支流管管壁引出用于形成反向运动流体的至少1条第一防逆流管、以及从第二支流管管壁引出用于形成反向运动流体的至少1条第二防逆流管;所述检测识别模块包括用于检测识别细长零件头部和尾部方向的传感器、处理器和存储器,所述存储器中存储有计算机程序,所述处理器执行所述程序时实现以下步骤:
8.s1、检测识别模块通过传感器检测并识别从上料机进入入口通道的细长零件的头
部和尾部方向;
9.s2、若细长零件的尾部在前,第一气缸推动第一滑块从入口通道承接尾部在前的细长零件并运动到第一出口通道,双通道同向输出模块通过流体介质吹动尾部在前的细长零件从第一出口通道先进入第一支流管、后进入汇流管;
10.s3、若细长零件的头部在前,第二气缸推动第二滑块从入口通道承接头部在前的细长零件并运动到第二出口通道,双通道同向输出模块通过流体介质吹动头部在前的细长零件从第二出口通道先进入第二支流管、后进入汇流管。
11.优选地,所述步骤s2处理头部在前的细长零件,所述步骤s3处理尾部在前的细长零件。
12.优选地,所述流动介质是空气。
13.优选地,所述传感器是摄像头,所述步骤s1通过图像识别技术检测并识别细长零件的头部和尾部方向。
14.优选地,从汇流管引出夹角为锐角的第一支流管和第二支流管。
15.优选地,所述防逆流的汇流模块包括从不同方向管壁引出、位置交错的2条第一防逆流管和第二防逆流管。
16.优选地,所述双通道同向输出模块还包括用于连接双通道同向输出模块和外部上料机的支架。
17.本发明一种头尾形状不同的细长零件同向输出装置有如下有益效果:将检测识别模块、双通道换向模块、防逆流的汇流模块,集成为具有智能化的同向输出装置;1、独特的同向输出装置实现细长零件头部和尾部自动识别和换向的过程;2、独特的防逆流汇流管结构,解决了双路路输入、单路输出时,细长零件的反向传输难题。
【附图说明】
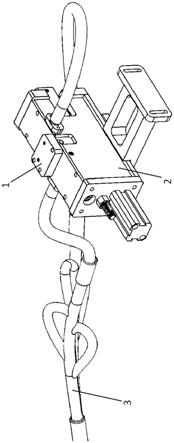
18.图1是一种头尾形状不同的细长零件同向输出装置结构示意图。
19.图2是一种头尾形状不同的细长零件同向输出装置双通道同向输出模块结构示意图。
20.图3是一种头尾形状不同的细长零件同向输出装置防逆流的汇流模块结构示意图。
21.附图中涉及的附图标记和组成部分如下:1、检测识别模块,2、双通道同向输出模块,21、入口通道,221、第一出口通道,222、第二出口通道,231、第一气缸,232、第二气缸,24、支架,3、防逆流的汇流模块,311、第一支流管,312、第一防逆流管,321、第二支流管,322、第二防逆流管,33、汇流管。
【具体实施方式】
22.下面结合实施例并参照附图对本发明作进一步描述。
23.实施例
24.本实施例实现一种头尾形状不同的细长零件同向输出装置。
25.图1是一种头尾形状不同的细长零件同向输出装置结构示意图。如附图1所示,本实施例一种头尾形状不同的细长零件同向输出装置包括检测识别模块1、双通道同向输出
模块2和防逆流的汇流模块3;检测识别模块1实现细长零件的头部和尾部区分功能,双通道同向输出模块2根据识别结果实现细长零件的单一方向运动,防逆流的汇流模块3实现多路通道细长零件汇流进入单通道传送的功能。
26.所述检测识别模块1包括传感器和算法电路,所述传感器检测细长零件头部和尾部形状数值差异,通过算法电路识别细长零件的头部或尾部,将运动控制信号发送给双通道同向输出模块2,控制气缸推动相应通道的运动。
27.图2是一种头尾形状不同的细长零件同向输出装置双通道同向输出模块结构示意图。如附图2所示,本实施例一种头尾形状不同的细长零件同向输出装置双通道同向输出模块2包括入口通道21、第一出口通道221、第二出口通道222、第一气缸231、第一滑块、第二气缸232、第二滑块和支架24;第一气缸231用于推动第一滑块作往复运动,第二气缸231用于推动第二滑块作往复运动。
28.图3是是一种头尾形状不同的细长零件同向输出装置防逆流的汇流模块结构示意图。如附图3所示,本实施例一种头尾形状不同的细长零件同向输出装置防逆流的汇流模块3包括第一支流管311、第一防逆流管312、第二支流管321、第二防逆流管322和汇流管33。第一支流管311和第二支流管321以一定的空间夹角和管道半径与汇流管33连接,以利于细长零件在管道内运动;第一支流管311连接有至少1条的第一防逆流管312,第二支流管321连接有至少1条的第二防逆流管322;当第一支流管311中流体介质(如:空气、液体等)推动细长零件运动,就会在汇流接头处产生分流现象,一部分流体介质会进入第二支流管321形成逆流,第二防逆流管322形成反向运动的流体,阻止逆流的产生,保证了第二支流管321内细长零件不会反向运动;同样道理,当第二支流管321中流体介质(如:空气、液体等)推动细长零件运动,就会在汇流接头处产生分流现象,一部分流体介质会进入第一支流管311形成逆流,第一防逆流管312形成反向运动的流体,阻止逆流的产生,保证了第一支流管311内细长零件不会反向运动。
29.本实施例一种头尾形状不同的细长零件同向输出装置双通道同向输出模块2入口通道21与外部上料机连接,第一出口通道221和第二出口通道222分别位于双通道同向输出模块2的两侧;细长零件经过入口通道21,尾部在前的细长零件从第一出口通道221输出,头部在前的细长零件从第二出口通道222输出,第一出口通道221和第二出口通道222传送方向的夹角为180
°
,保证了细长零件分别从2个出口通道传送时,具有同向的运动状态;第一出口通道221在双通道同向输出模块2内部与第一滑块241气动连接、在外部与第一支流管311连接;第二出口通道222在双通道同向输出模块2内部与第二滑块242气动连接、在外部与第二支流管321连接。支架24连接双通道同向输出装置和上料设备,支架24一端固定在双通道同向输出装置2底部,另一端与上料设备连接。
30.当细长零件不分头尾从上料机进入双通道同向输出模块2的入口通道21,检测识别模块1首先检测并识别细长零件的头部或尾部并发出运动控制信号。若细长零件的尾部在前,检测识别模块1发出控制信号,第一气缸231推动第一滑块从入口通道21承接尾部在前的细长零件并运动到第一出口通道221,双通道同向输出模块2吹动尾部在前的细长零件从第一出口通道221先进入第一支流管311、后进入汇流管33;当细长零件的头部在前,检测识别模块1发出控制信号,第二气缸232推动第二滑块从入口通道21承接头部在前的细长零件并运动到第二出口通道222,双通道同向输出模块2吹动头部在前的细长零件从第二出口
通道222先进入第二支流管321、后进入汇流管33;由于第一出口通道221和第二出口通道222传送方向的夹角为180
°
,无论从第一出口通道221还是从第二出口通道222进入汇流管33的细长零件,具有同向的运动状态。
31.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于任一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。
32.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
