1.本发明涉及无人机技术领域,尤其涉及多旋翼无人机集群系统及其工作方法。
背景技术:
2.多旋翼无人机,是一种具有三个及以上旋翼轴的特殊的无人驾驶直升机。其通过每个轴上的电动机转动,带动旋翼,从而产生升推力。旋翼的总距固定,而不像一般直升机那样可变。通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹;无人机系统包含了无人机飞行平台、相关的遥控站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统。
3.公开号cn110597285a公开了一种无人机集群控制系统及无人机编队控制方法,方法包括:地面站接收来自集群控制站发送的配置信息和控制指令;地面站根据接收到的配置信息进行相应配置;地面站根据接收到的控制指令对同个网络中所属无人机进行相应的控制;地面站接收无人机的执行结果,并将执行结果和地面站配置结果反馈至集群控制站。该方法只是简单的增加集群控制站、地面站和与地面站对应的无人机。地面站与集群控制站通过以太网连接,加之地面站和集群控制站间通信量少于地面站到无人机编队间通信量,地面站集群规模的增加,无人机编队的数量同样可以等比例扩大,完全满足超大规模无人机编队的要求。
4.现有的多旋翼无人机集群系统存在的缺陷是:不能对多旋翼无人机集群中无人机的内部状态、外部状态和运行环境进行实时监测并进行预警调整,使得无人机出现故障无法及时处理导致损坏的问题。
技术实现要素:
5.本发明的目的在于提供多旋翼无人机集群系统及其工作方法,本发明所要解决的技术问题为:
6.如何解决现有方案中不能对多旋翼无人机集群中无人机的内部状态、外部状态和运行环境进行实时监测并进行预警调整,使得无人机出现故障无法及时处理导致损坏的缺陷。
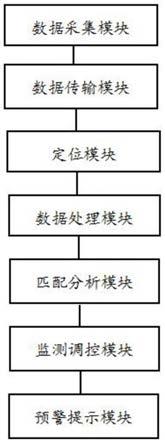
7.本发明的目的可以通过以下技术方案实现:多旋翼无人机集群系统,包括数据采集模块、数据传输模块、定位模块、数据处理模块、匹配分析模块、监测调控模块和预警提示模块;
8.数据采集模块用于采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据,将数据信息和环境信息一同通过数据传输模块发送至数据处理模块;
9.数据处理模块包含运行处理单元和环境处理单元,运行处理单元用于接收多旋翼无人机集群的数据信息并进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和
运匹值,具体的步骤包括;
10.步骤一:接收数据信息中的机型数据、运行速率数据、信号数据、耗电数据和温度数据,将机型数据标记为jxi,i=1,2,3...n;设定不同的无人机类型均对应一个不同的机型预设值,将机型数据中的机型与所有的无人机类型进行匹配获取对应的机型预设值并标记为jyzi,i=1,2,3...n;
11.步骤二:将运行速率数据中的运行速率标记为ysi,i=1,2,3...n;将运行速率与预设的速率阈值进行匹配,将与速率阈值不相等的运行速率对应的无人机进行标记并生成第一异常数据;将信号数据中的信号值标记为xhi,i=1,2,3...n;将信号值与预设的信号阈值进行匹配,将与信号阈值不相等的信号值对应的无人机进行标记并生成第二异常数据;将耗电数据中的耗电值标记为hzi,i=1,2,3...n;将耗电值与预设的耗电范围进行匹配,将不属于耗电范围的耗电值对应的无人机进行标记并生成第三异常数据;将温度数据中的运行温度标记为ywi,i=1,2,3...n;将运行温度与预设的温度范围进行匹配,将不属于温度范围的运行温度对应的无人机进行标记并生成第四异常数据;
12.步骤三:将标记的机型预设值、运行速率、信号值、耗电值和运行温度进行归一化处理并取值,利用公式计算获取无人机的状态值,该公式为:
[0013][0014]
其中,q
zt
表示为状态值,μ表示为预设的状态修正因子,a1、a2、a3、a4表示为不同的比例系数,ysi0表示为预设的速率阈值,xhi0表示为预设的信号阈值,hzi0表示为预设的耗电范围中值,ywi0表示为预设的温度范围中值;
[0015]
步骤四:获取无人机运行时的飞行高度并标记为fgi,i=1,2,3...n;将飞行高度与预设的高度阈值进行匹配,将与高度阈值不相等的飞行高度对应的无人机进行标记并生成第五异常数据;
[0016]
步骤五:将标记的飞行高度进行归一化处理并取值,利用公式计算获取无人机的运匹值,该公式为:
[0017][0018]
其中,q
yp
表示为运匹值,β表示为预设的运匹修正因子,b1、b2、b3、b4和b5表示为不同的比例系数,fgi0表示为预设的高度阈值;
[0019]
定位模块用于对多旋翼无人机集群中各个无人机的运行进行定位。
[0020]
优选的,环境处理单元用于接收环境信息并进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值,具体步骤包括:
[0021]
s21:接收环境信息中的气流数据、气压数据和气温数据,将气流数据中的气流值标记为qli,i=1,2,3...n;将气流值与预设的气流阈值进行匹配,将大于气流阈值的气流值对应的无人机进行标记并生成第一环影数据;将气压数据中的气压值标记为qyi,i=1,2,3...n;将气压值与预设的气压阈值进行匹配,将大于气压阈值的气压值对应的无人机进行标记并生成第二环影数据;将气温数据中的气温值标记为qwi,i=1,2,3...n;将气温值与预设的气温阈值进行匹配,将大于气温阈值的气温值对应的无人机进行标记并生成第三
环影数据;
[0022]
s22:将标记的气流值、气压值和气温值进行归一化处理并取值,利用公式计算获取各个无人机飞行时的环匹值,该公式为:
[0023][0024]
其中,q
hp
表示为环匹值,δ表示为预设的环匹修正因子,c1、c2、c3表示为不同的比例系数,qli0表示为预设的气流阈值,qyi0表示为预设的气压阈值,qwi0表示为预设的气温阈值。
[0025]
优选的,匹配分析模块用于根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集,具体的步骤包括:
[0026]
s31:接收状态值、运匹值和环匹值;
[0027]
s32:将状态值与预设的状态范围进行匹配,若状态值不大于状态范围的最小值,则判定该状态值对应的无人机内部运行状态正常并生成第一状态信号;若状态值大于状态范围的最小值且不大于状态范围的最大值,则判定该状态值对应的无人机内部运行状态轻微异常并生成第二状态信号;将第二状态信号对应的无人机设定为第一异常无人机;若状态值大于状态范围的最大值,则判定该状态值对应的无人机内部运行状态异常并生成第三状态信号,将第三状态信号对应的无人机设定为第二异常无人机;第一状态信号、第二状态信号和第三状态信号组合得到状态信号集;
[0028]
s33:将运匹值与预设的运匹范围进行匹配,若运匹值不大于运匹范围的最小值,则判定该运匹值对应的无人机外部运行状态正常并生成第一运匹信号;若运匹值大于运匹范围的最小值且不大于运匹范围的最大值,则判定该运匹值对应的无人机外部运行状态轻微异常并生成第二运匹信号;将第二运匹信号对应的无人机设定为第三异常无人机;若运匹值大于运匹范围的最大值,则判定该运匹值对应的无人机外部运行状态异常并生成第三运匹信号,将第三运匹信号对应的无人机设定为第四异常无人机;第一运匹信号、第二运匹信号和第三运匹信号组合得到运匹信号集;
[0029]
s34:将环匹值与环匹阈值进行匹配,若环匹值不大于环匹阈值,则判定该环匹值对应的无人机运行环境正常并生成第一环匹信号;若环匹值大于环匹阈值,则判定该环匹值对应的无人机运行环境异常并生成第二环匹信号,将第一环匹信号和第二环匹信号组合得到环匹信号集;
[0030]
s35:将状态信号集、运匹信号集和环匹信号集组合得到状态分析集。
[0031]
优选的,监测调控模块用于根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并通过预警提示模块进行预警和提示,具体的步骤包括:
[0032]
s41:接收状态分析集并进行分析;
[0033]
s42:若状态分析集中包含第二状态信号或者第三状态信号,则生成第一预警信号,根据第一预警信号提示运行的无人机的内部存在异常,对第一预警信号对应的无人机进行检修;
[0034]
s43:若状态分析集中包含第二运匹信号或者第三运匹信号,则生成第二预警信号,根据第二预警信号提示运行的无人机的整体状态存在异常,对第二预警信号对应的无人机进行检修;
[0035]
s44:若状态分析集中包含第二环匹信号,则生成第三预警信号,根据第三预警信号提示运行的无人机的环境存在异常,对第三预警信号对应的无人机停止运行。
[0036]
多旋翼无人机集群系统的工作方法,该工作方法的具体步骤包括:
[0037]
步一:采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据;
[0038]
步二:对数据信息进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值,对环境信息进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值;
[0039]
步三:根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集;
[0040]
步四:根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并进行预警和提示。
[0041]
本发明的有益效果:
[0042]
本发明公开的各个方面,通过数据采集模块、数据传输模块、定位模块、数据处理模块、匹配分析模块、监测调控模块和预警提示模块之间的配合使用,可以达到对多旋翼无人机集群中无人机的内部状态、外部状态和运行环境进行实时监测并进行预警调整,使得无人机出现故障可以及时处理避免损坏的目的;
[0043]
利用数据采集模块采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据;通过采集无人机的内部信息、状态信息和环境信息从三个方面综合监测无人机的整机运行情况,可以进行实时监测并及时预警提示提高监测效果的目的;
[0044]
数据处理模块包含运行处理单元和环境处理单元,利用运行处理单元接收多旋翼无人机集群的数据信息并进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值;利用环境处理单元接收环境信息并进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值;通过对采集的数据进行处理和分析计算,可以使得各个信息中的数据之间建立联系得到相关联的状态值和运匹值以及环匹值,无人机的运行监测提供有效的数据支撑;
[0045]
利用匹配分析模块根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集;利用监测调控模块根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并通过预警提示模块进行预警和提示;通过从三个方面对无人机的整体运行进行实时监测并及时进行预警和调整,可以对出现异常以及即将出现异常的无人机及时进行处理调整,从而达到提高无人机的运行安全的目的。
附图说明
[0046]
下面结合附图对本发明作进一步的说明。
[0047]
图1是本发明多旋翼无人机集群系统的模块框图。
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0049]
请参阅图1所示,本发明为多旋翼无人机集群系统,包括数据采集模块、数据传输模块、定位模块、数据处理模块、匹配分析模块、监测调控模块和预警提示模块;
[0050]
数据采集模块用于采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据,将数据信息和环境信息一同通过数据传输模块发送至数据处理模块;
[0051]
数据处理模块包含运行处理单元和环境处理单元,运行处理单元用于接收多旋翼无人机集群的数据信息并进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值,具体的步骤包括;
[0052]
步骤一:接收数据信息中的机型数据、运行速率数据、信号数据、耗电数据和温度数据,将机型数据标记为jxi,i=1,2,3...n;设定不同的无人机类型均对应一个不同的机型预设值,将机型数据中的机型与所有的无人机类型进行匹配获取对应的机型预设值并标记为jyzi,i=1,2,3...n;
[0053]
步骤二:将运行速率数据中的运行速率标记为ysi,i=1,2,3...n;将运行速率与预设的速率阈值进行匹配,将与速率阈值不相等的运行速率对应的无人机进行标记并生成第一异常数据;将信号数据中的信号值标记为xhi,i=1,2,3...n;将信号值与预设的信号阈值进行匹配,将与信号阈值不相等的信号值对应的无人机进行标记并生成第二异常数据;将耗电数据中的耗电值标记为hzi,i=1,2,3...n;将耗电值与预设的耗电范围进行匹配,将不属于耗电范围的耗电值对应的无人机进行标记并生成第三异常数据;将温度数据中的运行温度标记为ywi,i=1,2,3...n;将运行温度与预设的温度范围进行匹配,将不属于温度范围的运行温度对应的无人机进行标记并生成第四异常数据;
[0054]
步骤三:将标记的机型预设值、运行速率、信号值、耗电值和运行温度进行归一化处理并取值,利用公式计算获取无人机的状态值,该公式为:
[0055][0056]
其中,q
zt
表示为状态值,μ表示为预设的状态修正因子,a1、a2、a3、a4表示为不同的比例系数,ysi0表示为预设的速率阈值,xhi0表示为预设的信号阈值,hzi0表示为预设的耗电范围中值,ywi0表示为预设的温度范围中值;
[0057]
步骤四:获取无人机运行时的飞行高度并标记为fgi,i=1,2,3...n;将飞行高度与预设的高度阈值进行匹配,将与高度阈值不相等的飞行高度对应的无人机进行标记并生成第五异常数据;
[0058]
步骤五:将标记的飞行高度进行归一化处理并取值,利用公式计算获取无人机的运匹值,该公式为:
[0059][0060]
其中,q
yp
表示为运匹值,β表示为预设的运匹修正因子,b1、b2、b3、b4和b5表示为不同的比例系数,fgi0表示为预设的高度阈值;
[0061]
定位模块用于对多旋翼无人机集群中各个无人机的运行进行定位。
[0062]
环境处理单元用于接收环境信息并进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值,具体步骤包括:
[0063]
接收环境信息中的气流数据、气压数据和气温数据,将气流数据中的气流值标记为qli,i=1,2,3...n;将气流值与预设的气流阈值进行匹配,将大于气流阈值的气流值对应的无人机进行标记并生成第一环影数据;将气压数据中的气压值标记为qyi,i=1,2,3...n;将气压值与预设的气压阈值进行匹配,将大于气压阈值的气压值对应的无人机进行标记并生成第二环影数据;将气温数据中的气温值标记为qwi,i=1,2,3...n;将气温值与预设的气温阈值进行匹配,将大于气温阈值的气温值对应的无人机进行标记并生成第三环影数据;
[0064]
将标记的气流值、气压值和气温值进行归一化处理并取值,利用公式计算获取各个无人机飞行时的环匹值,该公式为:
[0065][0066]
其中,q
hp
表示为环匹值,δ表示为预设的环匹修正因子,c1、c2、c3表示为不同的比例系数,qli0表示为预设的气流阈值,qyi0表示为预设的气压阈值,qwi0表示为预设的气温阈值。
[0067]
匹配分析模块用于根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集,具体的步骤包括:
[0068]
接收状态值、运匹值和环匹值;
[0069]
将状态值与预设的状态范围进行匹配,若状态值不大于状态范围的最小值,则判定该状态值对应的无人机内部运行状态正常并生成第一状态信号;若状态值大于状态范围的最小值且不大于状态范围的最大值,则判定该状态值对应的无人机内部运行状态轻微异常并生成第二状态信号;将第二状态信号对应的无人机设定为第一异常无人机;若状态值大于状态范围的最大值,则判定该状态值对应的无人机内部运行状态异常并生成第三状态信号,将第三状态信号对应的无人机设定为第二异常无人机;第一状态信号、第二状态信号和第三状态信号组合得到状态信号集;
[0070]
将运匹值与预设的运匹范围进行匹配,若运匹值不大于运匹范围的最小值,则判定该运匹值对应的无人机外部运行状态正常并生成第一运匹信号;若运匹值大于运匹范围的最小值且不大于运匹范围的最大值,则判定该运匹值对应的无人机外部运行状态轻微异常并生成第二运匹信号;将第二运匹信号对应的无人机设定为第三异常无人机;若运匹值大于运匹范围的最大值,则判定该运匹值对应的无人机外部运行状态异常并生成第三运匹信号,将第三运匹信号对应的无人机设定为第四异常无人机;第一运匹信号、第二运匹信号和第三运匹信号组合得到运匹信号集;
[0071]
将环匹值与环匹阈值进行匹配,若环匹值不大于环匹阈值,则判定该环匹值对应
的无人机运行环境正常并生成第一环匹信号;若环匹值大于环匹阈值,则判定该环匹值对应的无人机运行环境异常并生成第二环匹信号,将第一环匹信号和第二环匹信号组合得到环匹信号集;
[0072]
将状态信号集、运匹信号集和环匹信号集组合得到状态分析集。
[0073]
监测调控模块用于根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并通过预警提示模块进行预警和提示,具体的步骤包括:
[0074]
接收状态分析集并进行分析;
[0075]
若状态分析集中包含第二状态信号或者第三状态信号,则生成第一预警信号,根据第一预警信号提示运行的无人机的内部存在异常,对第一预警信号对应的无人机进行检修;
[0076]
若状态分析集中包含第二运匹信号或者第三运匹信号,则生成第二预警信号,根据第二预警信号提示运行的无人机的整体状态存在异常,对第二预警信号对应的无人机进行检修;
[0077]
若状态分析集中包含第二环匹信号,则生成第三预警信号,根据第三预警信号提示运行的无人机的环境存在异常,对第三预警信号对应的无人机停止运行。
[0078]
实施例二
[0079]
多旋翼无人机集群系统的工作方法,该工作方法的具体步骤包括:
[0080]
步一:采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据;
[0081]
步二:对数据信息进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值,对环境信息进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值;
[0082]
步三:根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集;
[0083]
步四:根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并进行预警和提示;
[0084]
上述公式均是采集大量数据进行软件模拟得出且选取与真实值接近的一个公式,公式中的系数是由本领域技术人员根据实际情况进行设置。
[0085]
本发明的工作原理:本发明实施例中,利用数据采集模块采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据;通过采集无人机的内部信息、状态信息和环境信息从三个方面综合监测无人机的整机运行情况,可以进行实时监测并及时预警提示提高监测效果的目的;
[0086]
数据处理模块包含运行处理单元和环境处理单元,利用运行处理单元接收多旋翼无人机集群的数据信息并进行处理操作,利用公式
计算获取无人机的状态值,利用公式
[0087]
计算获取无人机的运匹值;利用环境处理单元接收环境信息并进行处理操作,利用公式计算获取各个无人机飞行时的环匹值;通过对采集的数据进行处理和分析计算,可以使得各个信息中的数据之间建立联系得到相关联的状态值和运匹值以及环匹值,无人机的运行监测提供有效的数据支撑;
[0088]
利用匹配分析模块根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集;利用监测调控模块根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并通过预警提示模块进行预警和提示;通过从三个方面对无人机的整体运行进行实时监测并及时进行预警和调整,可以对出现异常以及即将出现异常的无人机及时进行处理调整,从而达到提高无人机的运行安全的目的;通过数据采集模块、数据传输模块、定位模块、数据处理模块、匹配分析模块、监测调控模块和预警提示模块之间的配合使用,可以达到对多旋翼无人机集群中无人机的内部状态、外部状态和运行环境进行实时监测并进行预警调整,使得无人机出现故障可以及时处理避免损坏的目的。
[0089]
在本发明所提供的实施例中,应该理解到,所揭露的系统和方法,可以通过其它的方式实现。例如,以上所描述的实施例仅仅是示意性的,例如,所述模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式。
[0090]
所述作为分离部件说明的模块可以是或者也可以不是物理上分开的,作为模块显示的部件可以是或者也可以不是物理模块,即可以位于一个地方,或者也可以分布到多个网络模块上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方法的目的。
[0091]
另外,在本发明各个实施例中的各功能模块可以集成在一个控制模块中,也可以是各个模块单独物理存在,也可以两个或两个以上模块集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用硬件加软件功能模块的形式实现。
[0092]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。
[0093]
因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本发明内。不应将权利要求中的任何附关联图标记视为限制所涉及的权利要求。
[0094]
此外,显然“包括”一词不排除其他模块或步骤,单数不排除复数。系统权利要求中陈述的多个模块或装置也可以由一个模块或装置通过软件或者硬件来实现。第二等词语用来表示名称,而并不表示任何特定的顺序。
[0095]
最后应说明的是,以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。