1.本技术实施例涉及智能网联汽车控制领域,尤指一种智能网联汽车队列纵向时变延迟控制方法和装置。
背景技术:
2.随着全球汽车保有量的不断增加,有限的道路交通资源导致交通拥堵以及交通事故等现象频发。智能网联汽车技术的发展为解决这一问题提供了可行的途经。作为智能网联汽车技术的典型应用,智能网联汽车编队控制实现了车辆以较小的间距稳定行驶的功能,极大提高了道路的通行率,有效地减少了车用能源的消耗,这将是未来智能交通系统中的不可或缺的一环。
3.车辆队列的纵向控制是智能网联汽车编队控制的基础,其目的在于使队列中的跟随车辆以一定的间距策略跟随领航车的运动,并保持队列的稳定性。队列中的通信网络是传递各车状态信息的主要途经,为有效的编队控制提供可能。然而由于网络节点的移动以及通信密度的增加等原因,实际的网络收发过程中不可避免地会产生传输延迟、数据丢包以及时钟同步等问题,导致控制系统的性能下降,甚至引发车辆队列的不稳定。
4.现有的队列纵向控制方法主要有两种,一是未考虑通信延迟的纵向控制方法,另一种是考虑定延迟的纵向控制方法。前者主要集中于解决诸如车辆线性稳定性控制、异构车辆队列的控制以及队列解耦控制等问题,但这类控制方法通常不具备对于通信延迟的鲁棒性。后者仅考虑定延迟情况下,提升系统对于定通信延迟的鲁棒性。而通信网络延迟可分为源节点延迟、网络通道延迟和目标节点延迟,其中网络通道延迟是具有随机性的过程。故而通信网络延迟是具有时变性的,仅考虑定延迟的队列纵向鲁棒控制使得系统控制效果的保守性增加,因此对于时变通信网络延迟的编队控制的研究是必然趋势。
技术实现要素:
5.为了解决上述任一技术问题,本技术实施例提供了一种智能网联汽车队列系统中纵向控制方法和装置。
6.为了达到本技术实施例目的,本技术实施例提供了一种智能网联汽车队列系统中纵向控制方法,包括:
7.确定智能网联汽车队列系统中可接受的通信延迟上界值h1,其是通过预设的性能指标来确定的;
8.在t时刻存在时变通信延迟值λ
t
的条件下,分别获取第i辆车和第i-1辆相对于领航车的位置误差、速度误差和加速度误差,得到第i辆车的系统状态量和第i-1辆车的系统状态量
9.根据系统状态量以及预先获取的第i辆车的增益系数矩阵确定第i辆车在t时刻的控制策略ui,其中增益系统矩阵是根据预设的性能
指标来确定的;
10.采用所述控制策略ui对第i辆车在第t时刻的行驶状态进行纵向控制。
11.一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上文所述的方法。
12.一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上文所述的方法。
13.一种智能网联汽车队列系统中纵向控制装置,包括上文所述的电子装置。
14.上述技术方案中的一个技术方案具有如下优点或有益效果:
15.确定智能网联汽车队列系统中可接受的通信延迟上界值h1,其是通过预设的性能指标来确定的;在t时刻存在时变通信延迟值λ
t
的条件下,分别获取第i辆车和第i-1辆相对于领航车的位置误差、速度误差和加速度误差,得到第i辆车的系统状态量和第i-1辆车的系统状态量根据系统状态量以及预先获取的第i辆车的增益系数矩阵确定第i辆车在t时刻的控制策略ui,采用所述控制策略ui对第i辆车在第t时刻的行驶状态进行纵向控制,实现基于时变通信延迟的控制策略对车辆进行控制,提高了控制策略的准确性,更好地保证车辆队列的稳定性。
16.本技术实施例的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术实施例而了解。本技术实施例的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
17.附图用来提供对本技术实施例技术方案的进一步理解,并且构成说明书的一部分,与本技术实施例的实施例一起用于解释本技术实施例的技术方案,并不构成对本技术实施例技术方案的限制。
18.图1为本技术实施例提供的智能网联汽车队列系统中纵向控制方法的流程图;
19.图2为本发明实施例提供的在时变通信延迟条件下采用h infinity鲁棒控制器进行纵向控制的方法的流程示意图;
20.图3为本技术实施例提供的混合车辆队列的示意图。
具体实施方式
21.为使本技术实施例的目的、技术方案和优点更加清楚明白,下文中将结合附图对本技术实施例的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术实施例中的实施例及实施例中的特征可以相互任意组合。
22.图1为本技术实施例提供的智能网联汽车队列系统中纵向控制方法的流程图。如图1所示,包括:
23.步骤101、确定智能网联汽车队列系统中可接受的通信延迟上界值h1,其是通过预设的性能指标来确定的;
24.步骤102、在t时刻存在时变通信延迟值λ
t
的条件下,分别获取第i辆车和第i-1辆
相对于领航车的位置误差、速度误差和加速度误差,得到第i辆车的系统状态量和第i-1辆车的系统状态量
25.步骤103、根据系统状态量以及预先获取的第i辆车的增益系数矩阵确定第i辆车在t时刻的控制策略ui,其中增益系统矩阵是根据预设的性能指标来确定的;
26.步骤104、采用所述控制策略ui对第i辆车在第t时刻的行驶状态进行纵向控制。
27.本技术实施例提供的方法,确定智能网联汽车队列系统中可接受的通信延迟上界值h1,其是通过预设的性能指标来确定的;在t时刻存在时变通信延迟值λ
t
的条件下,分别获取第i辆车和第i-1辆相对于领航车的位置误差、速度误差和加速度误差,得到第i辆车的系统状态量和第i-1辆车的系统状态量根据系统状态量以及预先获取的第i辆车的增益系数矩阵确定第i辆车在t时刻的控制策略ui,采用所述控制策略ui对第i辆车在第t时刻的行驶状态进行纵向控制,实现基于时变通信延迟的控制策略对车辆进行控制,提高了控制策略的准确性,更好地保证车辆队列的稳定性。
28.下面对本技术实施例提供的方法进行说明:
29.本技术实施例提供一种智能网联汽车队列系统中纵向控制方法,应用于存在时变通信延迟的智能网联汽车队列系统中,通过收集车辆队列中各车的信息,建立混合车辆队列模型,进一步考虑时变通信延迟,设计h infinity鲁棒控制器,以更好地保证车辆队列的稳定性。
30.图2为本发明实施例提供的在时变通信延迟条件下采用h infinity鲁棒控制器进行纵向控制的方法的流程示意图。如图2所示,所述方法包括:
31.步骤201、收集智能网联汽车队列中各车辆的信息;
32.图3为本技术实施例提供的混合车辆队列的示意图。如图3所示,车辆的参数包含:期望车距di、车辆控制响应时间常数τi、总车辆数目n。其中各跟随车辆以一定的期望车距di跟踪领航车辆的运动变化;综合考虑车辆期望加速度到实际加速度的实现过程中的时滞现象,搭建单车动力学模型,具体如下:
[0033][0034]
在上述计算表达式(1)中,i=1,2,3,...,n;ui为控制输入,表示期望的加速度;τi为车辆控制响应时间常数。
[0035]
基于固定间距策略(即d1=d2=
…
=dn=dd),将单车动力学模型转化为对领航车的误差模型:
[0036]
[0037]
在上述计算表达式(2)中,dd表示固定的期望跟车间距;s0、v0和a0分别表示领航车的实际位置、速度以及加速度;知分别表示第i辆车相对于领航车的位置误差、速度误差和加速度误差。
[0038]
设置系统状态向量建立单车状态空间方程:
[0039][0040][0041][0042][0043]
在上述计算表达式(3)中,ai为第i辆单车的系统矩阵;b
ui
为第i辆单车的控制系数矩阵;b
wi
为第i辆单车的干扰系数矩阵。
[0044]
考虑时变通信延迟,基于前车-领航车通信网络结构进行控制律ui的设计:
[0045][0046][0047]
在上述计算表达式(1)中,和为对应车辆的增益系数矩阵;和表示时变通信延迟下的系统状态量;λ
t
为通信延迟变量;h1为通信延迟的上界;μ1为通信延迟的导数的上界;
[0048]
步骤202、根据各车的信息,基于前述控制律构建车辆队列的状态空间方程;
[0049]
取则车辆队列控制律为:
[0050]
u=kx(t-λ
t
)
ꢀꢀꢀ
(5)
[0051][0052]
进一步,得到车辆队列的状态空间方程:
[0053]
[0054][0055][0056][0057][0058]
在上述计算表达式(6)中,a表示车辆队列的系统矩阵;bu表示车辆队列的控制系数矩阵;bw表示车辆队列的干扰系数矩阵;bu、bw与a均是相应对角矩阵,此处省略;表示车辆队列的初始状态;z(t)为系统被控输出矩阵;in为n维单位矩阵;表示克罗内克积;
[0059]
步骤203、在车辆队列在领航车状态变化干扰输入以及通信网络存在时变延迟的条件下,确定所设计的h infinity控制器的性能指标j(w)以及lyapunov-krasovskki泛函;
[0060][0061]
在上述计算表达式(7)中,γ为h infinity控制器的性能约束;
[0062]
基于lyapunov稳定性定理,设计lyapunov-krasovskki泛函如下:
[0063]
式中p、q1和z1为待求正定矩阵.
[0064]
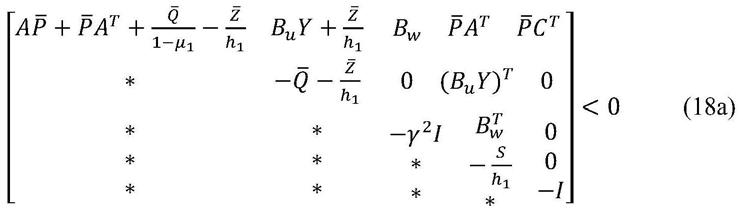
步骤204、在时变延迟下,确定队列稳定的非线性矩阵不等式条件
[0065]
为使所设计的h infinity鲁棒控制器达到要求的性能指标,应满足:
[0066][0067]
等价于:
[0068]
j(w)<0
ꢀꢀꢀ
(10)
[0069]
由初始条件知所设泛函v(x
t
)满足v(0)=0,且v(∞)>0,进行适当的缩放:
[0070][0071]
经过线性变化和舒尔补定理的运用,得到:
[0072][0073]
ε=[x
t
(t) x
t
(t-λ
t
) w
t
(t)]
t
[0074][0075]
其中不等式(12)成立等价于:
[0076]
φ1<0
ꢀꢀꢀ
(14-1)
[0077][0078]
令以及可以得到:
[0079][0080]
不等式(14-1)等价于:
[0081]
φ2<0
ꢀꢀꢀ
(16)
[0082]
综上所述,根据lyapunov稳定性定理可知,当存在正定对称矩阵综上所述,根据lyapunov稳定性定理可知,当存在正定对称矩阵以及合适维数的矩阵y和单位矩阵i满足不等式(16),可以保证在领航车状态变化的干扰输入以及通信网络存在时变延迟的条件下,智能网联汽车队列是稳定的;
[0083]
由于φ2中含有非线性项,故将不等式(16)的求解转化为一非线性最小化问题:
[0084][0085]
其中lmis表示为下列约束:
[0086][0087][0088]
[0089][0090][0091][0092][0093][0094]
步骤205、运用锥补线性化理论,对上述非线性最小化问题进行线性化求解;
[0095]
按如下流程实现:
[0096]
1、设定初始的通信延迟上界h
1o
、性能约束γ、通信延迟的导数上界μ1以及最大的迭代次数k
max
;初始化迭代次数,即k=0;
[0097]
2、基于上述lmis条件限制下,进行可行性问题的求解。寻找可行解2、基于上述lmis条件限制下,进行可行性问题的求解。寻找可行解s0,t0,j0,r0;
[0098]
3、求解下述基本线性矩阵不等式问题:
[0099][0100]
得出优化解t,s,j和r。
[0101]
4、如果步骤3中得出的优化解满足式(16)时,将通信延迟上界h1增大并返回步骤2;
[0102]
如果不满足式(16),进一步判断迭代次数是否超过最大的迭代次数k
max
;若超过,则退出循环并输出对应优化解以及通信延迟上界值h1,并计算得:若未超过,则迭代次数k=k 1,并返回步骤3;
[0103]
步骤206、通过上述数值迭代求解过程,获得h infinity反馈增益矩阵根据下式对反馈增益矩阵进行分解:
[0104][0105]
分解得到第i辆车的控制律ui,即分布式h infinity反馈控制器。
[0106][0107]
步骤207、使用分布式h infinity反馈控制器对智能网联汽车队列中的各个车辆进行纵向控制。
[0108]
与现有技术相比,本技术实施例提供的方法,综合考虑了车辆期望加速度到实际加速度的实现过程中的时滞现象,并收集车辆队列中各车的异构信息,建立了由异构智能网联车辆组成的混合车辆队列模型,更加符合实际交通场景,提高了控制方法的实用性。考虑了通信网络中存在时变通信延迟的情况,实现了智能网联汽车队列的h infinity鲁棒控制器的设计,用以保证车辆队列的稳定性,更加符合实际应用场景,为智能网联汽车编队控制的全面落地使用奠定基础。
[0109]
本技术实施例提供一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上文任一项中所述的方法。
[0110]
本技术实施例提供一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上文任一项中所述的方法。
[0111]
本技术实施例提供一种智能网联汽车队列系统中纵向控制装置,包括上文所述的电子装置。
[0112]
本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些组件或所有组件可以被实施为由处理器,如数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。