:
1.本发明涉及一种汽车减振器实时故障诊断方法,具体的说是通过直行工况下前后悬架的振幅匹配程度分析,判断悬架减振器是否存在功能衰减或失效,进而进行状态显示及报警,属于汽车底盘领域。
背景技术:
2.随着新能源汽车技术的发展,汽车向着电气化、自动化、智能化的方向发展,悬架系统对于整车操纵稳定性行驶安全性与舒适性有着重要影响。但是作为悬架重要部件的减振器缺乏实时有效的诊断方法和手段,若减振器失效,整车性能将会下降,普通用户不能及时客观的判断故障,极大地影响了行驶安全。
3.目前普遍采用的停车检测方法是观察减振器壳体是否漏油、颠簸路况下行驶后感受减振器温度或按压车身观察振幅收敛情况,操作麻烦,主观性与经验性强,极易产生误判,对于普通用户不够友好。而现有的减振器状态实时监测多为仅对单只减振器的腔室压力等进行监测,而缺乏系统级、整车级系统地分析判断。因而,开发一种简单、实时性强、准确度高的减振器故障诊断方法,成为亟需解决的技术问题。
技术实现要素:
4.本发明是为了解决上述现有技术存在的问题而提供一种汽车减振器实时故障诊断方法,本发明判断悬架减振器是否失效,进而进行状态显示及报警,具有实时性好、系统性强的优点。
5.本发明所采用的技术方案有:
6.一种汽车减振器实时故障诊断方法,包括
7.1)对方向盘的转角判断,若方向盘转角不等于0,则车轮发生了偏转,即车辆处于转弯等状态,此时不作减振器故障诊断,诊断结束;若方向盘转角等于0,则车轮没有发生偏转,即车辆处于直行状态,此时进入下一步;
8.2)通过高度传感器获取前后悬架的左右侧振幅,前悬架左右侧振幅分别为s1、s2,时间分别为t1、t2;后悬架左右侧振幅分别为s3、s4,时间分别为t3、t4;
9.3)根据汽车的加速度a、速度v和轴距s,由公式计算延时因子t,即时间t后,后轮会经过前轮的相同路况,所述公式为:
[0010][0011]
计算出延时因子后,将后悬架对应地后车身振幅时间相应减少t,即s3、s4得到对应的时间t5、t6;
[0012]
4)根据前后悬架的刚度、偏频特性计算折合因子,因前后悬架刚度不一致,计算前后悬架刚度的比值k=c1/c2,c1为前悬架刚度,c2为后悬架刚度,将后悬架左右侧振幅s3、s4除以k,得到对应的振幅s5、s6,对应时间为t5、t6;
[0013]
5)判前后悬架的车身振幅的对应关系,是否在误差范围内,即(s5-s1)/s1,如误差设计值为
±
5%,则偏差大于5%,即后悬架左端减振器失效,则仪表盘显示后左减振器故障并报警;偏差小于-5%,即前悬架左端减振器失效,则仪表盘显示后左减振器故障并报警;同理,通过(s6-s2)/s2计算误差,可分析前后悬架右侧减振器是否失效。
[0014]
进一步地,汽车减振器实时故障诊断时设置检测传感器,检测传感器接在can总线上,将对应的检测结果经can收发器传输给底盘控制器,用于分析判断,进而进行减振器状态显示与故障报警。
[0015]
进一步地,所述检测传感器包括转角传感器、加速度传感器、速度传感器和高度传感器,
[0016]
转角传感器用于监测方向盘转角,用于判断车辆是否直行;
[0017]
加速度传感器用于监测车辆行进加速度;
[0018]
速度传感器用于监测车辆行进速度,通过加速度与速度即可计算出车辆行经轴距长度的时间;
[0019]
高度传感器用于监测车辆的车身高度,车身高度变化时,可以监测车身振幅与振动衰减情况。
[0020]
本发明具有如下有益效果:
[0021]
1)对左右单侧的前后端进行对比分析,系统性更强,准确度更高,更容易发现故障。
[0022]
2)实时地对减振器的故障进行诊断,可以及时发现减振器失效,避免事故发生与保证整车性能。
[0023]
3)对减振器进行状态显示与故障报警,方便普通用户更好地了解减振器的状态,提高驾驶信心。
[0024]
4)不需要增加硬件,转向系统自带转角传感器,整车自带加速度与速度传感器,主动悬架系统自带高度传感器,仅需对软件增加策略即可。
附图说明:
[0025]
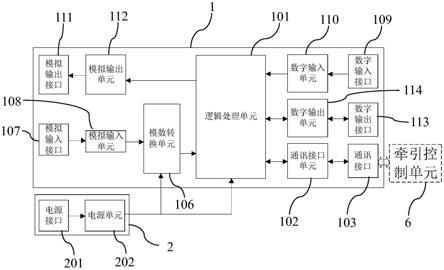
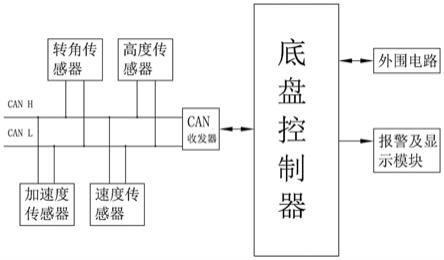
图1为本发明的控制系统电路图。
[0026]
图2所示为减振器故障诊断方法流程图。
[0027]
图3所示为不考虑延时因子与折合因子的车身振幅图。
[0028]
图4所示为仅考虑延时因子的车身振幅图。
[0029]
图5所示为考虑延时因子与折合因子的车身振幅图。
具体实施方式:
[0030]
下面结合附图对本发明作进一步的说明。
[0031]
图1为本发明的控制系统电路图,转角传感器、加速度传感器、速度传感器及高度传感器均挂接在can总线上,将检测结果经can收发器传输给底盘控制器,用于分析判断,进而进行减振器状态显示与故障报警。转角传感器用于监测方向盘转角a,用于判断车辆是否直行;加速度传感器用于监测车辆行进加速度;速度传感器用于监测车辆行进速度,通过加速度与速度即可计算出车辆行经轴距长度的时间;高度传感器用于监测车辆的车身高度,
车身高度变化时,可以监测车身振幅与振动衰减情况。
[0032]
图2所示为减振器故障诊断方法流程图,针对前后均为独立悬架的左右单侧前端、后端进行减振器故障诊断,
[0033]
1)对方向盘的转角判断,若方向盘转角不等于0,则车轮发生了偏转,即车辆处于转弯等状态,此时不作减振器故障诊断,诊断结束;若方向盘转角等于0,则车轮没有发生偏转,即车辆处于直行状态,此时进入下一步;
[0034]
2)通过高度传感器获取前后悬架的左右侧振幅,前悬架左右侧振幅分别为s1、s2,,时间分别为t1、t2;后悬架左右侧振幅分别为s3、s4,时间分别为t3、t4;
[0035]
3)根据汽车的加速度a、速度v和轴距s,由公式计算延时因子t,即时间t后,后轮会经过前轮的相同路况,所述公式为:
[0036][0037]
计算出延时因子后,将后悬架对应地后车身振幅时间相应减少t,即s3、s4得到对应的时间t5、t6;
[0038]
4)根据前后悬架的刚度、偏频特性计算折合因子,因前后悬架刚度不一致,计算前后悬架刚度的比值k=c1/c2,c1为前悬架刚度,c2为后悬架刚度。将后悬架左右侧振幅s3、s4除以k,得到对应的振幅s5、s6,对应时间为t5、t6;
[0039]
5)判前后悬架的车身振幅的对应关系,是否在误差范围内,即(s5-s1)/s1,如误差设计值为
±
5%,则偏差大于5%,即后悬架左端减振器失效,则仪表盘显示后左减振器故障并报警;偏差小于-5%,即前悬架左端减振器失效,则仪表盘显示后左减振器故障并报警。同理,通过(s6-s2)/s2计算误差,可分析前后悬架右侧减振器是否失效。
[0040]
图3所示为不考虑延时因子与折合因子的车身振幅图,在车辆直行经一凹坑时,曲线1为前端车身振幅,曲线2为后端车身振幅,曲线2相较曲线1不仅存在时间上的滞后,也存在振幅上的偏差。图4所示为仅考虑延时因子的车身振幅图,曲线3为考虑延时因子的后端车身振幅,曲线3相较曲线1周期一致,但存在振幅上的偏差。图5所示为考虑延时因子与折合因子的车身振幅图,曲线1为考虑延时因子与折合因子时,前后端车身的振幅几乎一致。若出现曲线4的情况即为减振器失效工况,振动衰减幅度明显偏小。
[0041]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。