技术特征:
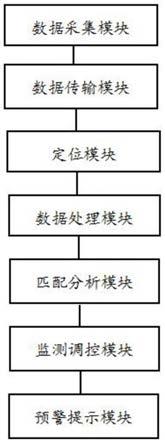
1.多旋翼无人机集群系统,包括数据采集模块、数据传输模块、定位模块、数据处理模块、匹配分析模块、监测调控模块和预警提示模块;其特征在于,数据采集模块用于采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,将数据信息和环境信息一同通过数据传输模块发送至数据处理模块;数据处理模块包含运行处理单元和环境处理单元,运行处理单元用于接收多旋翼无人机集群的数据信息并进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值;定位模块用于对多旋翼无人机集群中各个无人机的运行进行定位。2.根据权利要求1所述的多旋翼无人机集群系统,其特征在于,数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据;环境信息包含气流数据、气压数据和气温数据。3.根据权利要求1所述的多旋翼无人机集群系统,其特征在于,运行处理单元用于接收多旋翼无人机集群的数据信息并进行处理操作,具体步骤包括:s21:接收数据信息中的机型数据、运行速率数据、信号数据、耗电数据和温度数据,将机型数据标记为jxi,i=1,2,3...n;设定不同的无人机类型均对应一个不同的机型预设值,将机型数据中的机型与所有的无人机类型进行匹配获取对应的机型预设值并标记为jyzi,i=1,2,3...n;s22:将运行速率数据中的运行速率标记为ysi,i=1,2,3...n;将运行速率与预设的速率阈值进行匹配,将与速率阈值不相等的运行速率对应的无人机进行标记并生成第一异常数据;将信号数据中的信号值标记为xhi,i=1,2,3...n;将信号值与预设的信号阈值进行匹配,将与信号阈值不相等的信号值对应的无人机进行标记并生成第二异常数据;将耗电数据中的耗电值标记为hzi,i=1,2,3...n;将耗电值与预设的耗电范围进行匹配,将不属于耗电范围的耗电值对应的无人机进行标记并生成第三异常数据;将温度数据中的运行温度标记为ywi,i=1,2,3...n;将运行温度与预设的温度范围进行匹配,将不属于温度范围的运行温度对应的无人机进行标记并生成第四异常数据;s23:将标记的机型预设值、运行速率、信号值、耗电值和运行温度进行归一化处理并取值,利用公式计算获取无人机的状态值,该公式为:其中,q
zt
表示为状态值,μ表示为预设的状态修正因子,a1、a2、a3、a4表示为不同的比例系数,ysi0表示为预设的速率阈值,xhi0表示为预设的信号阈值,hzi0表示为预设的耗电范围中值,ywi0表示为预设的温度范围中值;s24::获取无人机运行时的飞行高度并标记为fgi,i=1,2,3...n;将飞行高度与预设的高度阈值进行匹配,将与高度阈值不相等的飞行高度对应的无人机进行标记并生成第五异常数据;s25:将标记的飞行高度进行归一化处理并取值,利用公式计算获取无人机的运匹值,该公式为:
其中,q
yp
表示为运匹值,β表示为预设的运匹修正因子,b1、b2、b3、b4和b5表示为不同的比例系数,fgi0表示为预设的高度阈值。4.根据权利要求1所述的多旋翼无人机集群系统,其特征在于,环境处理单元用于接收环境信息并进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值,具体步骤包括:s31:接收环境信息中的气流数据、气压数据和气温数据,将气流数据中的气流值标记为qli,i=1,2,3...n;将气流值与预设的气流阈值进行匹配,将大于气流阈值的气流值对应的无人机进行标记并生成第一环影数据;将气压数据中的气压值标记为qyi,i=1,2,3...n;将气压值与预设的气压阈值进行匹配,将大于气压阈值的气压值对应的无人机进行标记并生成第二环影数据;将气温数据中的气温值标记为qwi,i=1,2,3...n;将气温值与预设的气温阈值进行匹配,将大于气温阈值的气温值对应的无人机进行标记并生成第三环影数据;s32:将标记的气流值、气压值和气温值进行归一化处理并取值,利用公式计算获取各个无人机飞行时的环匹值,该公式为:其中,q
hp
表示为环匹值,δ表示为预设的环匹修正因子,c1、c2、c3表示为不同的比例系数,qli0表示为预设的气流阈值,qyi0表示为预设的气压阈值,qwi0表示为预设的气温阈值。5.根据权利要求1所述的多旋翼无人机集群系统,其特征在于,匹配分析模块用于根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集,具体的步骤包括:s41:接收状态值、运匹值和环匹值;s42:将状态值与预设的状态范围进行匹配,若状态值不大于状态范围的最小值,则判定该状态值对应的无人机内部运行状态正常并生成第一状态信号;若状态值大于状态范围的最小值且不大于状态范围的最大值,则判定该状态值对应的无人机内部运行状态轻微异常并生成第二状态信号;将第二状态信号对应的无人机设定为第一异常无人机;若状态值大于状态范围的最大值,则判定该状态值对应的无人机内部运行状态异常并生成第三状态信号,将第三状态信号对应的无人机设定为第二异常无人机;第一状态信号、第二状态信号和第三状态信号组合得到状态信号集;s43:将运匹值与预设的运匹范围进行匹配,若运匹值不大于运匹范围的最小值,则判定该运匹值对应的无人机外部运行状态正常并生成第一运匹信号;若运匹值大于运匹范围的最小值且不大于运匹范围的最大值,则判定该运匹值对应的无人机外部运行状态轻微异常并生成第二运匹信号;将第二运匹信号对应的无人机设定为第三异常无人机;若运匹值大于运匹范围的最大值,则判定该运匹值对应的无人机外部运行状态异常并生成第三运匹信号,将第三运匹信号对应的无人机设定为第四异常无人机;第一运匹信号、第二运匹信号和第三运匹信号组合得到运匹信号集;
s44:将环匹值与环匹阈值进行匹配,若环匹值不大于环匹阈值,则判定该环匹值对应的无人机运行环境正常并生成第一环匹信号;若环匹值大于环匹阈值,则判定该环匹值对应的无人机运行环境异常并生成第二环匹信号,将第一环匹信号和第二环匹信号组合得到环匹信号集;s45:将状态信号集、运匹信号集和环匹信号集组合得到状态分析集。6.根据权利要求1所述的多旋翼无人机集群系统,其特征在于,监测调控模块用于根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并通过预警提示模块进行预警和提示,具体的步骤包括:s51:接收状态分析集并进行分析;s52:若状态分析集中包含第二状态信号或者第三状态信号,则生成第一预警信号,根据第一预警信号提示运行的无人机的内部存在异常,对第一预警信号对应的无人机进行检修;s53:若状态分析集中包含第二运匹信号或者第三运匹信号,则生成第二预警信号,根据第二预警信号提示运行的无人机的整体状态存在异常,对第二预警信号对应的无人机进行检修;s54:若状态分析集中包含第二环匹信号,则生成第三预警信号,根据第三预警信号提示运行的无人机的环境存在异常,对第三预警信号对应的无人机停止运行。7.多旋翼无人机集群系统的工作方法,其特征在于,该工作方法的具体步骤包括:步骤一:采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息,该数据信息包含机型数据、运行速率数据、信号数据、耗电数据和温度数据,该环境信息包含气流数据、气压数据和气温数据;步骤二:对数据信息进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值,对环境信息进行处理操作,得到多旋翼无人机集群中各个无人机飞行时的环匹值;步骤三:根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集;步骤四:根据状态分析集对多旋翼无人机集群的运行和周围的环境进行监测和调控并进行预警和提示。
技术总结
本发明公开了多旋翼无人机集群系统及其工作方法,数据采集模块用于采集多旋翼无人机集群中各个无人机的数据信息和运行的环境信息;数据处理模块包含运行处理单元和环境处理单元,运行处理单元用于接收多旋翼无人机集群的数据信息并进行处理操作,得到多旋翼无人机集群中各个无人机的状态值和运匹值;环境处理单元用于接收环境信息并进行处理操作,得到各个无人机飞行时的环匹值;匹配分析模块用于根据状态值、运匹值和环匹值对无人机的飞行状态进行分析,得到状态分析集;可以解决不能对多旋翼无人机集群中无人机的内部状态、外部状态和运行环境进行实时监测并进行预警调整,使得无人机出现故障无法及时处理导致损坏的缺陷。无人机出现故障无法及时处理导致损坏的缺陷。无人机出现故障无法及时处理导致损坏的缺陷。
技术研发人员:唐为玮
受保护的技术使用者:安徽初代物联科技有限责任公司
技术研发日:2021.11.25
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。