1.本实用新型涉及冲压上料技术领域,具体为一种用于冲压上料的四轴机器人。
背景技术:
2.四轴机器人是工业机器人的一种,主要是采用四轴设计;四轴冲压机器人机械手每个关节的运动均由一台伺服电机和一台高精度谐波减速机共同实现,每个直线轴均由伺服电机和精密丝杠共同实现;现有的四轴机器人的机械手末端通常设置有支撑板便于金属板材的冲压上料。
3.现有的四轴机器人的机械手当移动地面上时,此时通过人工搬运将金属板材搬运到支撑板上,劳动量大且搬运效率低;金属板材在保管或者搬运时附着有杂物影响后续的冲压加工;为解决上述问题,本技术中提出一种用于冲压上料的四轴机器人。
技术实现要素:
4.(一)实用新型目的
5.为解决背景技术中存在的技术问题,本实用新型提出一种用于冲压上料的四轴机器人,通过清理机构能除去金属板材上沾附的杂物,避免杂物影响后续冲压的效果;通过输送机构能将板材自动进行输送,节约了人力。
6.(二)技术方案
7.为解决上述技术问题,本实用新型提供了一种用于冲压上料的四轴机器人,包括四轴机器人机械臂和与四轴机器人机械臂固定连接的u型板,所述u型板上固定连接有电机,所述u型板内设有清理机构,所述u型板上转动连接有三对转轴,每对所述转轴共同固定连接有输送辊,右前侧的所述转轴与u型板之间设有输送机构,所述u型板的内壁固定连接有两个电动伸缩杆,两个所述电动伸缩杆的输出端均固定连接有限位块。
8.优选的,所述清理机构包括与电机的输出端固定连接传动杆,所述传动杆贯穿u型板并与其转动连接,所述u型板内设有两个第一空腔,所述u型板上贯穿设有与其转动连接的四个旋转杆,四个所述旋转杆均固定连接有旋转盘,所述传动杆的外壁固定连接有两个主动轮,四个所述旋转杆均固定连接有从动轮,两个所述第一空腔内均设有传送带,上侧的所述传送带套设在上侧的两个从动轮和主动轮的外壁上,下侧的所述传送带套设在下侧的两个从动轮和主动轮的外壁上;通过清理机构能除去金属板材上沾附的杂物,避免杂物影响后续冲压的效果。
9.优选的,所述输送机构包括设置在u型板上的第二空腔,所述传动杆上固定连接有第一锥齿轮,所述第一锥齿轮啮合有第二锥齿轮,所述第二锥齿轮固定连接有第一摩擦轮,所述第一摩擦轮的外壁套设有与其转动连接的固定板,所述固定板与第二空腔的内壁固定连接,所述第一摩擦轮的内壁设有第二摩擦轮,所述第一摩擦轮的内壁和第二摩擦轮的外壁相贴合,所述转轴贯穿u型板并与其转动连接,所述转轴与第二摩擦轮固定连接;通过输送机构能将板材自动进行输送,节约了人力。
10.优选的,所述旋转盘上设有多个毛刷。
11.优选的,所述主动轮和两个从动轮呈三角形设置。
12.优选的,两个所述限位块的相对端均套设有一层保护套,所述保护套的材质为橡胶;可以对金属板材进行保护。
13.本实用新型的上述技术方案具有如下有益的技术效果:
14.1、本实用新型通过电机的输出端带动传动杆、第一锥齿轮、第二锥齿轮、第一摩擦轮、第二摩擦轮、最右侧的转轴和输送辊进行旋转,通过最右侧的输送辊旋转带动金属板材进行输送,节约人力。
15.2、本实用新型通过通过传动杆旋转带动主动轮、传送带、从动轮、旋转杆、旋转盘进行旋转,通过旋转盘上设置的毛刷可以对输送的金属板材上的杂质进行清理,避免金属板材上的杂质影响后续的冲压效果。
16.3、本实用新型通过当金属板材与u型板内壁接触时,第一摩擦轮和第二摩擦轮一同旋转变为相对旋转,即第一摩擦轮旋转,第二摩擦轮保持静止,此时右侧的输送辊和转轴也保持静止,避免输送辊继续旋转使金属板材与u型板碰撞造成金属板材损坏。
附图说明
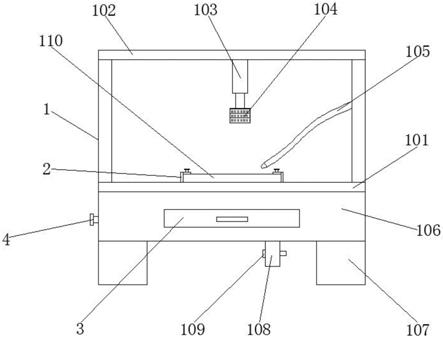
17.图1为本实用新型的剖面图;
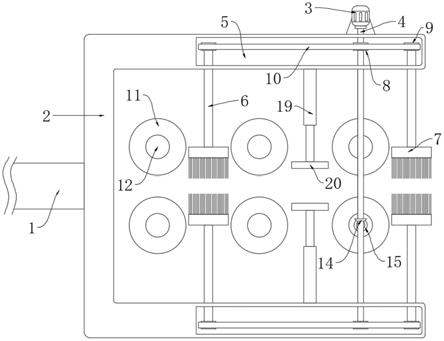
18.图2为本实用新型的部分结构俯视图。
19.图中:1四轴机器人机械臂、2u型板、3电机、4传动杆、5第一空腔、6旋转杆、7旋转盘、8主动轮、9从动轮、10传送带、11输送辊、12转轴、13第二空腔、14第一锥齿轮、15第二锥齿轮、16固定板、17第一摩擦轮、18第二摩擦轮、19电动伸缩杆、20限位块。
具体实施方式
20.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。
21.如图1和图2所示,本实用新型提出的一种用于冲压上料的四轴机器人,包括四轴机器人机械臂1和与四轴机器人机械臂1固定连接的u型板2,u型板2上固定连接有电机3,u型板2内设有清理机构,清理机构包括与电机3的输出端固定连接传动杆4,传动杆4贯穿u型板2并与其转动连接,u型板2内设有两个第一空腔5,u型板2上贯穿设有与其转动连接的四个旋转杆6,四个旋转杆6均固定连接有旋转盘7,旋转盘7上设有多个毛刷,传动杆4的外壁固定连接有两个主动轮8,四个旋转杆6均固定连接有从动轮9,主动轮8和两个从动轮9呈三角形设置,两个第一空腔5内均设有传送带10,上侧的传送带10套设在上侧的两个从动轮9和主动轮8的外壁上,下侧的传送带10套设在下侧的两个从动轮9和主动轮8的外壁上;通过清理机构能除去金属板材上沾附的杂物,避免杂物影响后续冲压的效果。
22.u型板2上转动连接有三对转轴12,每对转轴12共同固定连接有输送辊11,右前侧的转轴12与u型板2之间设有输送机构,输送机构包括设置在u型板2上的第二空腔13,传动杆4上固定连接有第一锥齿轮14,第一锥齿轮14啮合有第二锥齿轮15,第二锥齿轮15固定连接有第一摩擦轮17,第一摩擦轮17的外壁套设有与其转动连接的固定板16,固定板16与第二空腔13的内壁固定连接,第一摩擦轮17的内壁设有第二摩擦轮18,第一摩擦轮17的内壁
和第二摩擦轮18的外壁相贴合,当金属板材与u型板2未接触时,第一摩擦轮17和第二摩擦轮18之间的摩擦力使第一摩擦轮17带动第二摩擦轮18旋转,当金属板材与u型板2接触时,第一摩擦轮17和第二摩擦轮18之间相对旋转,转轴12与第二摩擦轮18固定连接,通过输送机构能将板材自动进行输送,节约了人力。
23.u型板2的内壁固定连接有两个电动伸缩杆19,两个电动伸缩杆19的输出端均固定连接有限位块20,两个限位块20的相对端均套设有一层保护套,保护套的材质为橡胶,可以对金属板材进行保护。
24.本实用新型的工作原理及使用流程:当四轴机器人机械臂1移动最底部进行上料时,启动电机3,电机3的输出端带动传动杆4、第一锥齿轮14、第二锥齿轮15、第一摩擦轮17、第二摩擦轮18、最右侧的转轴12和输送辊11进行旋转,通过最右侧的输送辊11旋转带动金属板材进行输送,同时通过传动杆4旋转带动主动轮8、传送带10、从动轮9、旋转杆6、旋转盘7进行旋转,通过旋转盘7上设置的毛刷可以对输送的金属板材上的杂质进行清理,避免金属板材上的杂质影响后续的冲压效果;当金属板材与u型板2内壁接触时,第一摩擦轮17和第二摩擦轮18一同旋转变为相对旋转,即第一摩擦轮17旋转,第二摩擦轮18保持静止,此时右侧的输送辊11和转轴12也保持静止,避免输送辊11继续旋转使金属板材与u型板2碰撞造成金属板材损坏;关闭电机3,此时启动两个电动伸缩杆19,电动伸缩杆19的输出端带动限位块20相对移动通过限位块20对金属板材进行夹持限位,避免在上料的过程中金属板材滑落造成危险。
25.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。