1.本实用新型涉及水域测绘技术领域,具体为一种淡水测绘无人船。
背景技术:
2.我国水资源丰富、水系众多,但我国又是一个缺水大国,如何有效利用现有水资源,特别是各类中小河流、湖泊是我国急需解决的问题。而对大量的中小河流及其周边的调查、测量是重要基础。传统的测量方法是使用人工划船,使用吊锤、定点采样等方式完成,效率低、成本高,无法满足现有国土、规划、和水资源工作的需要。
3.为了提高测绘效率,减少人工测绘强度,越来越多的无人船被用于水质采样、气象等应用,但是现有的无人船仅包括浮筒结构,将无人船放入湖泊、河海中的底面转运过程,需要人工或小车对无人船进行搬运,造成转运不便,增加了人工劳动强度。
技术实现要素:
4.本实用新型的目的在于:提供了一种淡水测绘无人船,解决了现有无人船转运不便的问题。
5.本实用新型的目的通过下述技术方案来实现:
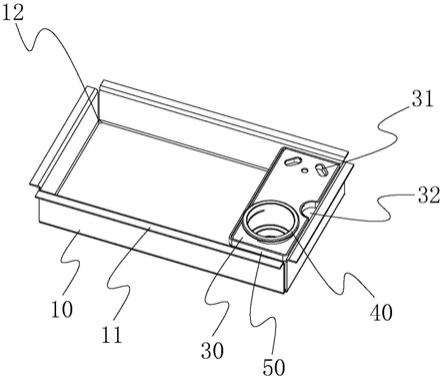
6.一种淡水测绘无人船,包括两侧的浮筒和中间的船架,浮筒的上部设有安装板,安装板上设有铰接板,铰接板与船架的支腿铰接,铰接板的内侧与船架的支腿之间设有相对的漂浮位孔,漂浮位孔内连接有螺栓,铰接板的外侧和船架的支腿上设有相配合的行走位孔,安装板上设有行走轮,行走轮的对称线与垂直线之间形成的钝角为a,行走位孔与船架支腿之间相对铰接中心形成的钝角为b,a等于b。
7.进一步的,所述的浮筒为充气式。
8.进一步的,所述的浮筒的前端呈弧形过渡上翘。
9.进一步的,所述的浮筒上设有推进器,船架上设有控制系统、电池、gnss接收机和测绘仪,推进器、电池、gnss接收机和测绘仪均与控制系统连接。
10.进一步的,所述的推进器位于浮筒的后端。
11.进一步的,所述的推进器为螺旋桨式。
12.进一步的,所述的测绘仪为测深仪。
13.进一步的,所述的船架上穿设固定有竖直的立杆,gnss接收机位于立杆的上方,测绘仪位于立杆的下方。
14.进一步的,所述的铰接板通过销子与船架铰接。
15.进一步的,所述的安装板的前后两端均设有行走轮。
16.本实用新型的有益效果:
17.1.在浮筒上固定行走轮,通过浮筒铰接的方式,能够调整漂浮位和行走位,实现漂浮测绘和行走转运两种模式,方便根据需要灵活调整无人船,提高了无人船的实用性,在车辆不能进入的场地能够灵活行走。
18.2.采用双体浮筒式设计,动力类型为双推进器差速控制,船上集成了高精度gnss和高精度陀螺仪,具有遥控和自动巡航功能,可广泛用于河流、湖泊和水库的水深地形测量、水质监测等领域。
19.前述本实用新型主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本实用新型可采用并要求保护的方案;并且本实用新型,(各非冲突选择)选择之间以及和其他选择之间也可以自由组合。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本实用新型所要保护的技术方案,在此不做穷举。
附图说明
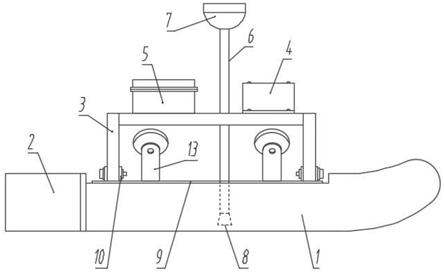
20.图1是本实用新型结构侧视图。
21.图2是本实用新型结构俯视图。
22.图3是图2的a-a向剖视图。
23.图中:1-浮筒,2-推进器,3-船架,4-控制系统,5-电池,6-立杆,7-gnss接收机,8-测深仪,9-安装板,10-铰接板,11-漂浮位孔,12-行走位孔,13-行走轮。
具体实施方式
24.下面结合具体实施例和附图对本实用新型作进一步的说明。
25.参考图1~图3所示,一种淡水测绘无人船,包括浮筒1、推进器2、船架3、控制系统4、电池5、立杆6、gnss接收机7、测深仪8、安装板9、铰接板10、漂浮位孔11、行走位孔12和行走轮13。
26.浮筒1位于中间的船架3的两侧,浮筒1为充气式,能够漂浮在水面中提供浮力,对船架进行支撑。浮筒1的前端呈弧形过渡上翘,减少浮筒前进的阻力。浮筒1的后端设有推进器2,推进器2为螺旋桨式,提供无人船前进的动力。
27.浮筒1的上部设有安装板9,安装板用于安装连接船架3和行走轮13。安装板9上焊接或一体制造有铰接板10,铰接板10通过销子与船架3的支腿铰接,从而安装板能够相对船架的支腿旋转活动,使得浮筒位于下方或行走轮位于下方。
28.铰接板10的内侧与船架3的支腿之间设有相对的漂浮位孔11,漂浮位孔11内连接有螺栓,将螺栓拧紧并卡设在漂浮位孔内,将船架和安装板固定,此时浮筒位于下方,能够在水域进行漂浮作业。
29.铰接板10的外侧和船架3的支腿上设有相配合的行走位孔12,行走轮13的对称线与垂直线之间形成的钝角为a,行走位孔12与船架3支腿之间相对铰接中心形成的钝角为b,a等于b。
30.安装板9上安装设有行走轮13,将漂浮位孔内的螺栓拆除,然后将浮筒外转,保证铰接板和船架上的行走位孔相对,重新将螺栓穿入卡设,实现铰接板和船架的固定,此时行走轮位于下方,能够在地面上进行行走转运。两侧的安装板9通过前后两端设有的行走轮13,形成四个轮子的行走支撑,方便在狭窄、崎岖底面上行走。
31.船架3上设有控制系统4、电池5、gnss接收机7和测绘仪,推进器2、电池5、gnss接收机7和测绘仪均与控制系统4连接,控制系统用于控制其它各部件的动作,电池用于向整个系统供电,gnss接收机和高精度陀螺仪配合,能够实现遥控和自动巡航功能。
32.测绘仪为测深仪8,用于测量水域深度,同样的,也可以采用其它测量传感器进行作业。船架3上穿设固定有竖直的立杆6,gnss接收机7位于立杆6的上方,方便接受遥控信号,测绘仪位于立杆6的下方,用于针对水域进行测量。
33.本技术的主要技术特点:
34.1.智能化:集成智能导航,集成高精度gnss和高精度陀螺仪;实现遥控和自动巡航功能,设定坐标点即可自动完成路径巡航,同时具备自动返航和故障保护功能。
35.2.模块化/便携化:该船体采用双体浮筒结构设计,使用pvc充气浮筒,浮筒采用多气室设计,每个气室单独充放气,以增强浮筒的稳定性与可靠性。无人船上层平台采用316l不锈钢框架,该框架由多组不锈钢方管以插接方式组装而成,便于快速的安装、拆卸、存放和运输。
36.3.动力强劲:无人船配备2套电动推进器,该推进器为自主研发的无刷电动推进器,采用正弦波控制方式;高效的动力系统可有效提升无人船续航时间,提高抗流、抗风能力,提升野外作业测量效率。
37.4.一船多能:标配单波束测深仪,用于河流、湖泊和水库的水深地形测量,同时也可以集成水质、气象等多种传感器开展综合作业。
38.5.成本低:基于开源硬件设备进行无人船控制系统开发,有效降低了整船成本,便于该无人船的业务化应用推广。
39.前述本实用新型基本例及其各进一步选择例可以自由组合以形成多个实施例,均为本实用新型可采用并要求保护的实施例。本实用新型方案中,各选择例,与其他任何基本例和选择例都可以进行任意组合。
40.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。