1.本发明涉及多足机器人技术领域,具体涉及一种机械腿关节角度限幅的通用性配置方法。
背景技术:
2.深海爬游混合型无人潜水器是一种新型的水下无人装备,既能够在恶劣复杂的海底环境下自主爬行,又能在洋流扰动下定向巡游。兼具无人自主航行器(auv)高效、大范围的机动能力以及遥控航行器(rov)的精确移动定位、作业能力,具有稳定性高、能耗低、环境适应性强的特点,具有广阔的应用价值。
3.爬游潜水器在复杂海底爬行,主要依靠的是模块化水下机械腿。如图1所示,机械腿的模块化关节主要由驱动器1、增量式编码器2、驱动电机3、减速器4、旋转变压器5(绝对式编码器)和机体6组成,其中旋转变压器5记录机械腿的模块化关节的绝对角度位置,增量式编码器2记录驱动电机3转动的相对角度位置。由于机械结构、电子线路等硬件的限制,机械腿运动过程中的关节角度存在一定限制,在驱动器1底层程序中设定软件限位,从而有效防止机械腿因为关节运动幅度较大而损坏。
4.机械腿关节角度限幅配置涉及到增量式编码器2与绝对式编码器角度增加方向问题,以及增量式编码器2与绝对式编码器的换算关系,缺少通用、高效的配置方法。机械腿的驱动电机3的增量式编码器2在上电时刻的位置角度为0
°
,与实际位置角度不符,同一位置的角度可能相差360
°
,而且增量式编码器2与绝对式编码器角度增加的方向可能相反,传统的限幅配置方法需要针对这些问题分别考虑,在配置多关节机械腿时带来很大工作量及错误。因此,需要对机械腿关节角度限幅设计系统化的配置方法,以便于快速、通用、方便、高效地指导机械腿关节角度限幅的配置过程。
技术实现要素:
5.有鉴于此,本发明提供了一种机械腿关节角度限幅的通用性配置方法,能够快速、通用、方便、高效地指导机械腿关节角度限幅的配置过程。
6.本发明的技术方案为:一种机械腿关节角度限幅的通用性配置方法,包括以下步骤:
7.步骤一:根据机械腿的初始姿态,确定机械腿各关节在运动前的初始位置角度α
abs0
,以及此时旋转变压器的计数值c
abs0
;
8.步骤二:根据机械腿实际运动范围,以及避免机械腿关节机械碰撞的要求,确定各关节相对初始位置的角度上限α
absmax
及下限α
absmin
;
9.步骤三:根据步骤二中确定的各关节相对初始位置的角度上限及下限,确定旋转变压器相对初始位置计数值的上限δc
absmax
和下限δc
absmin
;
10.步骤四:读取机械腿关节任一实际位置的旋转变压器的计数值c
abs
,确定机械腿关节相对当前实际位置的运动角度上限δα
absmax
和下限δα
absmin
;
11.步骤五:根据驱动电机与模块化关节输出端之间减速器的减速比k,换算得到驱动电机运动角度的上限αi
ncmax
和下限α
incmin
;结合驱动电机的实时运动角度α
inc
与增量式编码器计数c
inc
之间的比例关系α
inc
/360=c
inc
/k
inc
,得到增量式编码器计数的上限c
incmax
和下限c
incmin
;其中,k
inc
为增量式编码器的计数与驱动电机的角度之间的比例系数;
12.步骤六:若满足要求时,则完成参数设置,终止配置;否则,更新参数c
abs0
和c
abs
并返回步骤一;其中,k
abs
为机械腿关节增加360
°
时,旋转变压器增加的计数值。
13.优选地,所述步骤一中,取180
°
>α
abs0
>-180
°
,
14.优选地,所述步骤二中,取180
°
α
absmax
>α
absmin
>-180
°
。
15.优选地,所述步骤三中,当旋转变压器与增量式编码器的角度增加方向相同时,得到δc
absmax
=c
abs0
k
abs
·
α
absmax
/360,δc
absmin
=c
abs0
kabs
·
α
absmin
/360;当旋转变压器与增量式编码器的角度增加方向相反时,得到δc
absmax
=c
abs0-k
abs
·
α
absmax
/360,δc
absmin
=c
abs0-k
abs
·
α
absmin
/360;其中,取k
abs
=16384。
16.优选地,所述步骤四中,当旋转变压器与增量式编码器角度增加方向相同时,得到aα
absmax
=360
·
(-c
abs
δc
absmax
)/k
abs
,aα
absmin
=360
·
(-c
abs
δc
absmin
)/k
abs
;当旋转变压器与增量式编码器角度增加方向相反时,得到δα
absmax
=-360
·
(-c
abs
δc
absmax
)/k
abs
,δα
absmin
=-360
·
(-c
abs
δc
absmin
)/k
abs
;其中,取
17.优选地,所述步骤五中,α
incmax
=k
·
δα
absmax
,α
incmin
=k
·
δα
absmin
;其中,k=161。
18.优选地,所述步骤六中,参数c
abs0
和c
abs
的更新规则为:
19.(1)若为确保关节旋转角度在预设范围,更新后的c
abs0
=c
abs0-k
abs
;
20.(2)若为确保关节旋转角度在预设范围,更新后的c
abs0
=c
abs0
k
abs
;
21.(3)若为确保关节旋转角度在预设范围,更新后的c
abs
=c
abs-k
abs
;
22.(4)若为确保关节旋转角度在预设范围,更新后的c
abs
=c
abs
k
abs
;
23.(5)若为确保关节旋转角度在一定范围,更新后的c
abs-c
abs0
=c
abs-c
abs0-k
abs
;
24.(6)若为确保关节旋转角度在一定范围,更新后的c
abs-c
abs0
=c
abs-c
abs0
k
abs
;其中,180
°
>α
abs0
>-180
°
,180
°
>α
absmax
>α
absmin
>-180
°
。
25.有益效果:
26.1、本发明的机械腿关节角度限幅的通用性配置方法,将不同关节的角度限幅进行统一配置,显著提高了关节角度限幅的配置效率;该方法配置的角度限幅针对关节运动范围内的任意位置都适用,无需重复配置;该方法对外界环境及配套试验设施的依赖性较低,配置过程灵活,操作简单、易于实现,可以迅速推广到其他涉及到电机、减速器、编码器配置
的旋转作动机构上。
27.2、本发明中机械腿各关节在运动前的初始位置角度和此时旋转变压器的计数值的范围设定,确保关节旋转角度在一定范围内,从而适应工程中,同一关节角度相差360
°
时,关节实际位置相同这一实际情况。
28.3、本发明中机械腿各关节相对初始位置的角度上限和下限的范围限定,能够有效确保各关节在一定角度范围内旋转。
附图说明
29.图1为现有技术中机械腿的模块化关节组成示意图。
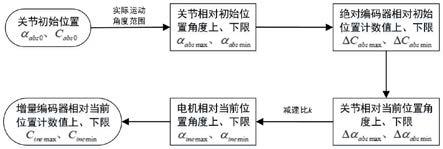
30.图2为本发明中模块化关节限幅的通用性配置原理图。
31.图3为本发明中角度值换算图,图中,c
′
abs0
为与机械腿关节初始位置角度相差360
°
时旋转变压器的计数值,c
′
abs
为与机械腿关节任一实际位置相差360
°
时旋转变压器的计数值。
32.其中,1-驱动器,2-增量式编码器,3-驱动电机,4-减速器,5-旋转变压器,6-机体。
具体实施方式
33.下面结合附图并举实施例,对本发明进行详细描述。
34.本实施例提供了一种机械腿关节角度限幅的通用性配置方法,能够快速、通用、方便、高效地指导机械腿关节角度限幅的配置过程。
35.本实施例所采用的机械腿的模块化关节的各个组成部分的功能如下:
36.驱动器1接收指令运动角度α
abs
,根据减速器4的减速比k,以及增量式编码器2的计数与驱动电机3的角度之间的比例系数k
inc
,计算得到驱动电机3的运动角度为α
motor
=k
·
α
abs
,以及增量式编码器2的计数为c
inc
=k
·
α
abs
·kinc
/360,然后驱动器1将其中预设的驱动电机3的转动速度、加速度等信息传递给驱动电机3,将计数值传递给增量式编码器2;
37.增量式编码器2监控驱动电机3的转动角度值,根据驱动器1传递的计数值信息,换算得到驱动电机3转动的角度值;
38.驱动电机3接收驱动器1传递的转动速度、加速度等信息,以及增量式编码器2传递的计数值等信息,转动到指定位置后停止;
39.减速器4的输入端连接驱动电机3的输出端,用于对驱动电机3的输出扭矩进行扩大,减速器4的输出端作为模块化关节的输出端;
40.旋转变压器5监控模块化关节的旋转角度,其转子与减速器4的输出端相连;
41.机体6作为驱动器1、增量式编码器2、驱动电机3、减速器4和旋转变压器5的载体,具有水密功能;
42.本实施例所使用的机械腿各关节由相同的模块化关节组成,具有良好的互换性和维修性。
43.在此基础上,如图2所示,本实施例的关节角度限幅的通用性配置方法包括以下步骤:
44.步骤一:根据机械腿支撑在地上的初始姿态,确定机械腿各关节在运动前的初始位置角度α
abs0
,以及此时旋转变压器5的计数值c
abs0
;在工程实际中,同一关节角度相差360
°
时,关节实际位置相同,为确保关节旋转角度在一定范围内,通常需要保证180
°
>α
abs0
>-180
°
,其中,k
abs
为机械腿关节增加360
°
时,旋转变压器5增加的计数值;
45.步骤二:根据机械腿实际运动范围,以及避免机械腿关节机械碰撞的要求,确定各关节相对初始位置的角度上限α
absmax
及下限α
absmin
;为确保各关节旋转角度在一定范围,通常需要保证180
°
>α
absmax
>α
absmin
>-180
°
;
46.步骤三:根据步骤二中确定的各关节相对初始位置的角度上限及下限,确定旋转变压器5相对初始位置计数值的上限和下限;
47.当旋转变压器5与增量式编码器2的角度增加方向相同时,得到旋转变压器5相对初始位置计数值的上限δc
absmax
=c
abs0
k
abs
·
α
absmax
/360及下限δc
absmin
=c
abs0
k
abs
·
α
absmin
/360;
48.当旋转变压器5与增量式编码器2的角度增加方向相反时,得到旋转变压器5相对初始位置计数值的上限δc
absmax
=c
abs0-k
abs
·
α
absmax
/360及下限δc
absmin
=c
abs0-k
abs
·
α
absmin
/360;其中,根据旋转变压器5计数值与旋转角度实际对应关系,取k
abs
=16384;
49.步骤四:读取机械腿关节任一实际位置的旋转变压器5的计数值c
abs
,确定机械腿关节相对当前实际位置的运动角度上限和下限;
50.当旋转变压器5与增量式编码器2角度增加方向相同时,得到机械腿关节相对当前实际位置的运动角度上限为:δα
absmax
=360
·
(-c
abs
δc
absmax
)/k
abs
,
51.下限为:δα
absmin
=360
·
(-c
abs
δc
absmin
)/k
abs
;
52.当旋转变压器5与增量式编码器2角度增加方向相反时,得到机械腿关节相对当前实际位置的运动角度上限为δα
absmax
=-360
·
(-c
abs
δc
absmax
)/k
abs
,
53.下限为:δα
absmin
=-360
·
(-c
abs
δc
absmin
)/k
abs
;其中,为确保关节旋转角度在一定范围,通常需要保证
54.步骤五:根据驱动电机3与模块化关节输出端之间减速器4的减速比k,换算得到驱动电机3运动角度的上限α
incmax
=k
·
δα
absmax
及下限α
incmin
=k
·
δα
absmin
;结合驱动电机3的实时运动角度α
inc
与增量式编码器2计数c
inc
之间的比例关系α
inc
/360=c
inc
/k
inc
,得到增量式编码器2计数的上限c
incmax
及下限c
incmin
,即为驱动电机2运动幅值的上下限;其中,根据增量式编码器2计数值与旋转角度实际对应关系,设置k
inc
=65536,根据减速器4的实际减速比,设置k=161;
55.步骤六:如果上述配置过程中满足步骤六:如果上述配置过程中满足要求时,则完成参数设置,终止配置;否则,如图3所示,按照如下的配置原则更新参数c
abs0
和c
abs
:
56.(1)若为确保关节旋转角度在预设范围,更新后的c
abs0
=c
abs0-k
abs
,此时c
abs0
的工程实际位置不变(即更新前后的工程实际位置相同);
57.(2)若为确保关节旋转角度在预设范围,更新后的c
abs0
=c
abs0
k
abs
,此时c
abs0
的工程实际位置不变;
58.(3)若为确保关节旋转角度在预设范围,更新后的c
abs
=c
abs-k
abs
,此时c
abs
的工程实际位置不变;
59.(4)若为确保关节旋转角度在预设范围,更新后的c
abs
=c
abs
k
abs
,此时c
abs
的工程实际位置不变;
60.(5)若为确保关节旋转角度在一定范围,更新后的c
abs-c
abs0
=c
abs-c
abs0-k
abs
,此时c
abs-c
abs0
的工程实际位置不变;
61.(6)若为确保关节旋转角度在一定范围,更新后的c
abs-c
abs0
=c
abs-c
abs0
k
abs
,此时c
abs-c
abs0
的工程实际位置不变;
62.其中,180
°
>α
abs0
>-180
°
,180
°
>α
absmax
>α
absmin
>-180
°
;
63.更新上述参数后,重复步骤一~步骤五。
64.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。