1.本实用新型涉及仿生机器人技术领域,特别是一种条鳍推进仿生水下机器人结构。
背景技术:
2.水下机器人是一种工作于水下的极限作业机器人,能够在水下执行特定任务的水下可移动装置,又称潜水器。为了实现水下机器人运动的可控性与灵活性,需要为水下机器人配置推进器,而当前普遍的螺旋桨型推进器存在着对环境扰动大、隐蔽性差、推进效率低等问题,无法高质量地满足相关活动的要求。
技术实现要素:
3.本实用新型目的在于提供一种条鳍推进仿生水下机器人结构,以解决现有螺旋桨推进的水下机器人隐蔽性差的问题。
4.本实用新型的目的通过以下技术方案来实现:一种条鳍推进仿生水下机器人结构,包括具有中轴线的主控制舱,所述主控制舱上设置有主支撑框架,所述主支撑框架上设置有两排摆动机构,两排所述摆动机构沿所述中轴线对称,每排所述摆动机构上均安装有柔性鳍,所述主支撑框架上还安装有水密电机,所述水密电机与所述摆动机构的动力输入端连接。
5.优选地,所述主支撑框架包括沿中轴线依次设置的头部支撑框架、中部支撑框架以及尾部支撑框架,所述头部支撑框架与所述尾部支撑框架上均安装有一对导流稳定板,同对所述导流稳定板沿所述中轴线对称,所述摆动机构安装在所述中部支撑框架上,所述水密电机通过所述头部支撑框架安装在所述主控制舱上。
6.优选地,所述摆动机构包括曲轴、曲臂、l型的摆臂以及摆臂连接架,所述曲臂转动安装在所述曲轴的连杆轴颈上,所述曲臂的另一端与所述摆臂铰接,所述柔性鳍安装在所述摆臂的另一端,所述曲轴转动安装在所述中部支撑框架上,所述曲轴的转轴平行于所述中轴线,所述水密电机的转轴与所述曲轴的动力输入端连接,所述摆臂连接架安装在所述中部支撑框架的外壁上,且位于所述曲轴的一侧,所述摆臂连接架的另一端与所述摆臂的弯曲处铰接,所述摆臂的弯曲处的内角背向所述摆臂连接架。
7.优选地,所述中部支撑框架由若干中部抱箍组成,所述中部抱箍环抱在所述主控制舱上,且沿所述中轴线均布,所述中部抱箍由一对半圆环组成,所述半圆环的两端均一体成型有夹臂,位于所述中轴线同侧的所述夹臂通过螺栓连接,所述曲轴通过所述夹臂转动安装在所述半圆环上,所述夹臂上开设有容纳所述连杆曲颈的缺口,所述摆臂连接架通过螺栓安装在所述半圆环上,位于所述中轴线同侧的所述导流稳定板通过对应的所述柔性鳍连接。
8.优选地,所述曲轴由若干段组成,且相邻两段通过销钉连接,每段所述曲轴上均设置一个连杆曲颈。
9.优选地,所述头部支撑框架与所述尾部支撑框架均由两对夹板组成,每对所述夹板均通过螺栓连接,并夹持在所述主控制舱上,所述导流稳定板与所述水密电机均通过对应的所述夹板夹持在所述主控制仓上。
10.优选地,还包括两瓣壳体,两瓣所述壳体相互扣合,所述主控制舱、所述头部支撑框架、所述中部支撑框架以及所述尾部支撑框架均位于扣合的所述壳体内,所述柔性鳍与所述导流稳定板均位于扣合的所述壳体外。
11.优选地,位于所述主控制舱底部的所述壳体上设置有两组传感器安装点位,两组所述传感器安装点位分别位于所述主控制舱的两端,每组所述传感器安装点位由三个安装位组成,每组的三个安装位均绕所述中轴线均布。
12.优选地,所述主控制舱由头部浮舱、中部控制舱以及尾部浮舱组成。
13.与现有技术相比本实用新型的有益效果为:
14.可广泛应用在水下考古、海洋科考、水产养殖、水下侦查、水下巡逻等多种应用场景,同时采用仿生柔性驱动,相关运动驱动平滑,涡流小,减少边际损失,提高了推进效率,降低了噪音。
附图说明
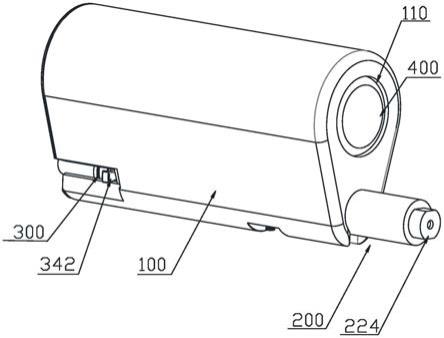
15.图1 为本实用新型的结构示意图;
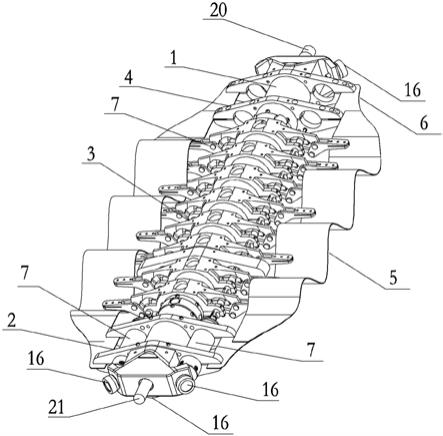
16.图2 为主框架的结构示意图;
17.图3 为中部支撑框架的结构示意图一;
18.图4 为中部支撑框架的结构示意图二;
19.图5 为主控制舱的结构示意图;
20.图中,1-主控制舱,2-头部支撑框架,3-中部支撑框架,4-尾部支撑框架,5-柔性鳍,6-导流稳定板,7-水密电机,8-曲轴,9-曲臂,10-摆臂,11-摆臂连接架,12-半圆环,13-夹臂,14-缺口,15-壳体,16-传感器安装点位,17-头部浮舱,18-中部控制舱,19-尾部浮舱,20-深度传感器安装位,21-避障声纳安装位。
具体实施方式
21.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。通常在此处附图中描述和示出的本实用新型实施方式的组件可以以各种不同的配置来布置和设计。
22.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
23.需要说明的是,在不冲突的情况下,本实用新型中的实施方式及实施方式中的特征可以相互组合。
24.如图1和5所示,一种条鳍推进仿生水下机器人结构,包括具有中轴线的主控制舱1,主控制舱1的两端分别设置有深度传感器安装位20和避障声纳安装位21,主控制舱1由头
部浮舱17、中部控制舱18以及尾部浮舱19组成,头部和尾部浮舱19用于安装浮力调节器,中部控制舱18用于安装中央控制器和电池组件,主控制舱1上安装有主支撑框架,主支撑框架包括沿中轴线依次设置的头部支撑框架2、中部支撑框架3以及尾部支撑框架4,中部支撑框架3上设置有两排摆动机构,两排摆动机构沿中轴线对称,每排摆动机构上均安装有柔性鳍5,头部支撑框架2与尾部支撑框架4均由两对夹板组成,每对夹板均通过螺栓连接,并夹持在主控制舱1上,导流稳定板6与水密电机7均通过对应的夹板夹持在主控制仓上,同对导流稳定板6沿中轴线对称,水密电机7通过头部支撑框架2安装在主控制舱1上,水密电机7与摆动机构的动力输入端连接,主控制舱1、头部支撑框架2、中部支撑框架3以及尾部支撑框架4均安装在相互扣合的两瓣壳体15内,扣合的两瓣壳体15近试水晶形的多面体,柔性鳍5与导流稳定板6均位于扣合的壳体15外,采用该结构的水下机器人可广泛应用在水下考古、海洋科考、水产养殖、水下侦查、水下巡逻等多种应用场景,同时采用仿生柔性驱动,相关运动驱动平滑,涡流小,减少边际损失,提高了推进效率,降低了噪音。
25.在本实施例中,如图2-4所示,摆动机构包括曲轴8、曲臂9、l型的摆臂10以及摆臂连接架11,中部支撑框架3由若干中部抱箍组成,中部抱箍环抱在主控制舱1上,且沿中轴线均布,中部抱箍由一对半圆环12组成,半圆环12的两端均一体成型有夹臂13,位于中轴线同侧的夹臂13通过螺栓连接,曲轴8通过夹臂13转动安装在半圆环12上,曲轴8的转轴平行于中轴线,夹臂13上开设有容纳连杆曲颈的缺口14,曲轴8由若干段组成,且相邻两段通过销钉连接,每段曲轴8上均设置一个连杆曲颈,连杆轴颈上均安装有曲臂9,曲臂9的另一端与摆臂10铰接,柔性鳍5安装在摆臂10的另一端,摆臂连接架11通过螺栓安装在半圆环12上,且位于曲轴8的一侧,摆臂连接架11的另一端与摆臂10的弯曲处铰接,且摆臂10的弯曲处的内角背向摆臂连接架11,位于中轴线同侧的导流稳定板6通过对应的柔性鳍5连接,水密电机7的转轴与曲轴8的动力输入端连接。
26.在本实施例中,如图2所示,位于主控制舱1底部的壳体15上设置有两组传感器安装点位16,两组传感器安装点位16分别位于主控制舱1的两端,每组传感器安装点位16由三个安装位组成,每组的三个安装位均绕中轴线均布,安装点位用于安装光电传感器。
27.本实用新型的工作过程如下:仿生机器人通过岸上设定装置通过无线或有线通讯电缆将控制指令及相关工作任务下达给仿生机器人,然后将仿生机器人放入水中,机器人将根据其内部携带的传感器感知重浮力是否平衡,感知机器人头部和尾部初始状态是否处于水平状态,如果机器人头尾状态没有在水平状态,则机器人将自动调节头部浮力调节器和尾部浮力调节器的浮力状态关系直到仿生机器人头尾重浮力平衡处于水平状态,同时保证仿生机器人能够完全没入水中,进入近似零浮力状态,机器人完成自身状态调整后启动工作流程。初始时,头部浮力调节器浮力减小仿生机器人低头入水,右边水密电机7和左边水密电机7同步正转,则两边的驱动电机带动机器人两边的摆动动力总成旋转,然后每个独立位置的摆臂10做规律的上下周期顺序摆动,由此带动安装在摆臂10端部的柔性鳍5形成正弦曲面,做周期的波浪形运动形成向后的推力,推动机器人前进或者后退。由于两边的摆动频率相同因此仿生机器人做水下直线前进运动,当机器人达到设定深度时,机器人按程序指令调节,使得仿生机器人的头部浮力增大,从而使得仿生机器人进入水平潜航工作状态;当机器人需要左转弯时,仿生机器人的左边的水密电机7转速降低,右边的水密电机7转速加快则仿生机器人做左转弯运动,反之则仿生机器人做右转弯运动;如果需要快速转弯
或作原地掉头运动,则可左边的水密电机7反转,右边的水密电机7正转则可更为快速的实现转弯或原地掉头运动,其反向运动以此类推,当仿生机器人行进过程中左前避障的光电传感器检测到障碍物时则仿生机器人做右转运动,反之右前避障的光电传感器检测到障碍物则仿生机器人做左转向运动;当俯视的光电传感器检测到障碍物时仿生机器人调节头部浮力调节器和尾部浮力调节器实现仿生机器人抬头避障;当仿生机器人完成相关航行任务后需要上浮时,仿生机器人将头部浮力调节器浮力增大,仿生机器人抬头,同时机器人总体浮力增大,仿生机器人在左右鳍条推进下快速上浮。当深度传感器的压力小于某一个设定值时即认为仿生机器人到达水面(比如0.05米),仿生机器人结束航行任务。
28.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。