1.本技术涉及车载显示屏加工技术领域,更具体的说,特别涉及一种基于labview控制的点胶控制系统、工作方法及点胶设备。
背景技术:
2.随着汽车电子技术的飞速发展,显示屏的外观越来越大,出现了双联甚至是三联的屏幕,制造过程中对屏幕的贴合稳定性和便捷性有了更高的要求;而传统的点胶设备受限于运动轨迹范围,故不足以满足大屏幕的点胶控制,为了满足不同尺寸产品生产,需要设计一种柔性的、适应性强的点胶控制系统。
技术实现要素:
3.本发明的目的在于提供一种基于labview控制的点胶控制系统的工作方法,解决现有点胶设备受限于运动轨迹范围,难以满足大屏幕的点胶控制的技术问题。
4.为了解决以上提出的问题,本发明实施例提供了如下所述的技术方案:
5.一种基于labview控制的点胶控制系统的工作方法,包括以下步骤:
6.接收生产型号的选定;
7.控制设备恢复初始状态;
8.基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作。
9.进一步地,所述基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作的步骤包括:
10.控制上层托盘移动至上料位;
11.上层托盘上料;
12.判断下层托盘是否在点胶;
13.若下层托盘在点胶,则待下层托盘点胶完成并离开点胶位时控制上层托盘移动至点胶位进行点胶;若下层托盘没在点胶,则控制上层托盘移动至点胶位进行点胶;
14.上层托盘点胶完成后控制上层托盘移动至人工操作位;
15.人工操作完成后,判断下层托盘是否在点胶;
16.若下层托盘没在点胶,则控制上层托盘移动至下料位;若下层托盘在点胶,则控制下层托盘下降以避位,控制上层托盘移动至下料位。
17.进一步地,所述基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作的步骤包括:
18.控制下层托盘移动至上料位;
19.下层托盘上料;
20.判断上层托盘是否在点胶;
21.若上层托盘在点胶,则待上层托盘点胶完成并离开点胶位时控制下层托盘移动至
点胶位进行点胶;若上层托盘没在点胶,则控制下层托盘移动至点胶位进行点胶;
22.下层托盘点胶完成后控制下层托盘移动至人工操作位;
23.人工操作完成后,判断上层托盘是否在点胶;
24.若上层托盘没在点胶,则控制下层托盘移动至下料位;若上层托盘在点胶,则控制上层托盘下降以避位,控制下层托盘移动至下料位。
25.进一步地,所述基于labview控制的点胶控制系统的工作方法还包括:
26.运行点胶控制程序;
27.控制伺服电机回原;
28.根据产品的点胶轨迹需求,控制伺服电机按设定参数运动;
29.保存伺服电机的运动数据。
30.进一步地,所述基于labview控制的点胶控制系统的工作方法还包括:
31.在对新产品进行点胶轨迹学习时,接收产品上的胶线形态信息和胶线重量信息;
32.基于强化学习方法,根据胶线形态信息、胶线重量信息和学习模型获得点胶轨迹;
33.输出点胶轨迹。
34.进一步地,所述基于labview控制的点胶控制系统的工作方法还包括:
35.以胶线形态信息和胶线重量信息作为训练数据对学习模型进行更新。
36.进一步地,所述基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作的步骤还包括:
37.获取产品的点胶区域;
38.确定点胶区域对应的预设点胶轨迹;
39.根据预设点胶轨迹,对点胶参数进行设置;
40.根据点胶参数模拟点胶轨迹,判断点胶轨迹是否符合预设点胶轨迹;
41.若点胶轨迹符合预设点胶轨迹,则控制伺服电机按照点胶轨迹进行点胶。
42.进一步地,所述设定参数包括设定方向、速度和行程,所述运动数据包括电机的方向、速度、脉冲量。
43.为了解决以上提出的技术问题,本发明实施例还提供了一种基于labview控制的点胶控制系统,采用了如下所述的技术方案:
44.一种基于labview控制的点胶控制系统,包括:
45.选定模块,用于接收生产型号的选定;
46.初始模块,用于控制设备恢复初始状态;
47.控制模块,用于基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作。
48.为了解决以上提出的技术问题,本发明实施例还提供了一种点胶设备,采用了如下所述的技术方案:
49.一种点胶设备,包括如上所述的基于labview控制的点胶控制系统。
50.与现有技术相比,本发明实施例主要有以下有益效果:
51.一种基于labview控制的点胶控制系统的工作方法,可实现较大运动轨迹范围的点胶控制,满足双联屏甚至三联屏范围的点胶控制;工站内部采用上下分层的并行结构化设计,即工站内有独立运行的上下两层的子工站,可同时进行两台产品的并行加工生产,上
下层合作,上位机程序采用并行执行的方式,可节省生产时间,提高效率;基于labview上位机程序,对设备上层托盘和下层托盘进行统一点胶以及运动控制,避免上层托盘和下层托盘动作干扰,提高设备的运行效率;在对新产品进行点胶轨迹学习时,基于labview上位机程序可根据产品的外型结构,快速学习记录产品的轨迹数据;labview可快速新建产品的点胶轨迹数据和实时虚拟显示电机点胶轨迹路线,提高设备的便捷性和可视性。
附图说明
52.为了更清楚地说明本发明的方案,下面将对实施例描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
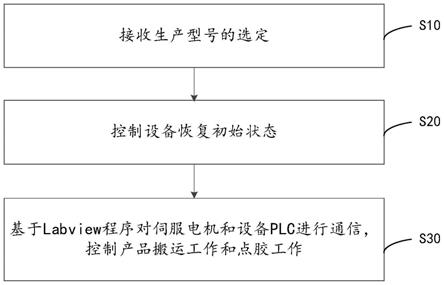
53.图1为本发明实施例中基于labview控制的点胶控制系统的工作方法的流程框图;
54.图2为本发明实施例中步骤s30的流程框图;
55.图3为本发明实施例中步骤s30的另一流程框图;
56.图4为本发明实施例中设备运行流程图;
57.图5为本发明实施例中记录学习点胶轨迹流程图;
58.图6为本发明实施例中上下层托盘点胶控制的流程图。
具体实施方式
59.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本发明的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排它的包含。本发明的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
60.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
61.为了使本领域技术人员更好地理解本发明方案,下面将参照相关附图,对本发明实施例中的技术方案进行清楚、完整地描述。
62.实施例
63.一种基于labview控制的点胶控制系统的工作方法,如图1所示,包括以下步骤:
64.步骤s10,接收生产型号的选定;
65.步骤s20,控制设备恢复初始状态;
66.步骤s30,基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作。
67.本发明实施例提供的基于labview控制的点胶控制系统的工作方法,可应用于车载显示屏、仪表屏点胶控制相关的技术领域,可实现较大运动轨迹范围的点胶控制,满足双联屏甚至三联屏范围的点胶控制;工站内部采用上下分层的并行结构化设计,即工站内有
独立运行的上下两层的子工站,可同时进行两台产品的并行加工生产,上下层合作,上位机程序采用并行执行的方式,可节省生产时间,提高效率;基于labview上位机程序,对设备上层托盘和下层托盘进行统一点胶以及运动控制,避免上层托盘和下层托盘动作干扰,提高设备的运行效率。
68.如图4所示,该设备启动时,需要在程序运行前选择生产对应的机型。接收生产型号的选定,生成提示初始化操作的提示,提示操作人员对设备进行初始化操作,设备准备就绪后,程序会进入自动运行状态。等待产品上料,待确认产品上料后,伺服电机带动产品至点胶位,发送点胶请求,控制伺服电机进行点胶操作。
69.在一个实施例中,如图2所示,所述步骤s30包括:
70.步骤s311,控制上层托盘移动至上料位;
71.步骤s312,上层托盘上料;
72.步骤s313,判断下层托盘是否在点胶;
73.步骤s314,若下层托盘在点胶,则待下层托盘点胶完成并离开点胶位时控制上层托盘移动至点胶位进行点胶;若下层托盘没在点胶,则控制上层托盘移动至点胶位进行点胶;
74.步骤s315,上层托盘点胶完成后控制上层托盘移动至人工操作位;
75.步骤s3116,人工操作完成后,判断下层托盘是否在点胶;
76.步骤s317,若下层托盘没在点胶,则控制上层托盘移动至下料位;若下层托盘在点胶,则控制下层托盘下降以避位,控制上层托盘移动至下料位。
77.为提高设备的利用率和减少等待时间,设备设计为上层托盘和下层托盘的方案,基于labview上位机程序,对设备上层托盘和下层托盘进行统一点胶以及运动控制,避免上层托盘和下层托盘动作干扰,提高设备的运行效率;具体的,结合图6,控制上层托盘移动至上料位,将产品搬运至上层托盘实现上层托盘的上料;当上层托盘要移动至点胶位之前,判断下层托盘是否在点胶,当下层托盘在点胶位时,上层托盘会等待下层托盘点胶完毕并离开后,再控制上层托盘前往点胶位进行点胶,若下层托盘没在点胶,则控制上层托盘移动至点胶位进行点胶;上层托盘点胶完成后,控制上层托盘移动至人工操作位,人工操作位主要对点完胶的产品进行屏幕的安装压合;当上层托盘要从人工操作位移至下料位时,判断下层托盘是否在点胶,如果下层托盘不在点胶位,上层托盘则直接移至下料位进行下料,如果下层托盘在点胶位,则控制下层托盘下降,对上层托盘让路放行以使上层托盘能够移动至下料位,当上层托盘到达下料位后,下层托盘上升继续完成剩余的点胶动作。
78.需要说明的是,设备初始化时,本发明实施例默认上层托盘处于上料位,即设备初始化时控制上层托盘移至上料位,当上层托盘首次上料时,直接前往点胶位进行点胶操作,上层托盘点胶完成后再移至人工操作位。在其他实施例中,设备初始化时,也可控制下层托盘移至上料位。
79.在一个实施例中,如图3所示,所述步骤s30包括:
80.步骤s321,控制下层托盘移动至上料位;
81.步骤s322,下层托盘上料;
82.步骤s323,判断上层托盘是否在点胶;
83.步骤s324,若上层托盘在点胶,则待上层托盘点胶完成并离开点胶位时控制下层
托盘移动至点胶位进行点胶;若上层托盘没在点胶,则控制下层托盘移动至点胶位进行点胶;
84.步骤s325,下层托盘点胶完成后控制下层托盘移动至人工操作位;
85.步骤s326,人工操作完成后,判断上层托盘是否在点胶;
86.步骤s327,若上层托盘没在点胶,则控制下层托盘移动至下料位;若上层托盘在点胶,则控制上层托盘下降以避位,控制下层托盘移动至下料位。
87.本发明实施例对下层托盘的控制原理和如上所述的上层托盘的控制原理相同;具体的,控制下层托盘移动至上料位,将产品搬运至下层托盘实现下层托盘的上料;当下层托盘要移动至点胶位之前,判断上层托盘是否在点胶,当上层托盘在点胶位时,下层托盘会等待上层托盘点胶完毕并离开后,再控制下层托盘前往点胶位进行点胶,若上层托盘没在点胶,则控制下层托盘移动至点胶位进行点胶;下层托盘点胶完成后,控制下层托盘移动至人工操作位,人工操作位主要对点完胶的产品进行屏幕的安装压合;当下层托盘要从人工操作位移至下料位时,判断上层托盘是否在点胶,如果上层托盘不在点胶位,下层托盘则直接移至下料位进行下料,如果上层托盘在点胶位,则控制上层托盘下降,对下层托盘让路放行以使下层托盘能够移动至下料位,当下层托盘到达下料位后,上层托盘上升继续完成剩余的点胶动作。设备设计为上层托盘和下层托盘的方案,提高了设备的利用率和减少等待时间,基于labview上位机程序,对设备上层托盘和下层托盘进行统一点胶以及运动控制,避免上层托盘和下层托盘动作干扰,提高设备的运行效率。
88.如图5所示,所述基于labview控制的点胶控制系统的工作方法还包括:
89.运行点胶控制程序;
90.控制伺服电机回原;
91.根据产品的点胶轨迹需求,控制伺服电机按设定参数运动;
92.保存伺服电机的运动数据。
93.在对新产品进行点胶轨迹学习时,基于labview上位机程序可根据产品的外型结构,快速学习记录产品的轨迹数据。labview可快速新建产品的点胶轨迹数据和实时虚拟显示电机点胶轨迹路线,提高设备的便捷性和可视性。具体的,运行点胶控制程序,控制伺服电机回原,所有伺服电机回原后方可程序控制伺服电机运动。根据产品的点胶轨迹需求,控制三轴电机配合,沿所期望的点胶轨迹进行运动,并把电机的运动数据记录保存至配置文件内。记录完成后,可直接播放运行配置文件数据,观察所记录数据的运行轨迹。基于labview上位机,可实现点胶轨迹的记录存储、轨迹的播放和便捷修改轨迹;可通过修改轨迹配置文件,在线生成时,快速调整运动参数,优化设备点胶质量和避免停线修改参数的时间;在电脑显示界面上实时虚拟显示电机运行的轨迹路线,方便查看电机运动轨迹。
94.需要说明的是,控制伺服电机按设定参数运动,设定参数包括设定方向、速度和行程等,记录当前步骤的方向、速度和位置数据;根据产品的点胶轨迹需求,继续记录剩余点胶轨迹数据;保存运动数据至配置文件,运动数据包括电机的方向、速度、脉冲量等数据。记录完成后,可直接播放运行配置文件数据,观察所记录数据的运行轨迹。
95.所述基于labview控制的点胶控制系统的工作方法还包括:
96.在对新产品进行点胶轨迹学习时,接收产品上的胶线形态信息和胶线重量信息;
97.基于强化学习方法,根据胶线形态信息、胶线重量信息和学习模型获得点胶轨迹;
98.输出点胶轨迹。
99.所述基于labview控制的点胶控制系统的工作方法还包括:
100.以胶线形态信息和胶线重量信息作为训练数据对学习模型进行更新。
101.所述步骤s30还包括:
102.获取产品的点胶区域;
103.确定点胶区域对应的预设点胶轨迹;
104.根据预设点胶轨迹,对点胶参数进行设置;
105.根据点胶参数模拟点胶轨迹,判断点胶轨迹是否符合预设点胶轨迹;
106.若点胶轨迹符合预设点胶轨迹,则控制伺服电机按照点胶轨迹进行点胶。
107.为了解决以上提出的技术问题,本发明实施例还提供了一种基于labview控制的点胶控制系统,采用了如下所述的技术方案:
108.一种基于labview控制的点胶控制系统,其特征在于,包括:
109.选定模块,用于接收生产型号的选定;
110.初始模块,用于控制设备恢复初始状态;
111.控制模块,用于基于labview程序对伺服电机和设备plc进行通信,控制产品搬运工作和点胶工作。
112.所述控制模块还用于控制上层托盘移动至上料位;上层托盘上料;判断下层托盘是否在点胶;若下层托盘在点胶,则待下层托盘点胶完成并离开点胶位时控制上层托盘移动至点胶位进行点胶;若下层托盘没在点胶,则控制上层托盘移动至点胶位进行点胶;上层托盘点胶完成后控制上层托盘移动至人工操作位;人工操作完成后,判断下层托盘是否在点胶;若下层托盘没在点胶,则控制上层托盘移动至下料位;若下层托盘在点胶,则控制下层托盘下降以避位,控制上层托盘移动至下料位。
113.为提高设备的利用率和减少等待时间,设备设计为上层托盘和下层托盘的方案,基于labview上位机程序,对设备上层托盘和下层托盘进行统一点胶以及运动控制,避免上层托盘和下层托盘动作干扰,提高设备的运行效率;具体的,控制上层托盘移动至上料位,将产品搬运至上层托盘实现上层托盘的上料;当上层托盘要移动至点胶位之前,判断下层托盘是否在点胶,当下层托盘在点胶位时,上层托盘会等待下层托盘点胶完毕并离开后,再控制上层托盘前往点胶位进行点胶,若下层托盘没在点胶,则控制上层托盘移动至点胶位进行点胶;上层托盘点胶完成后,控制上层托盘移动至人工操作位,人工操作位主要对点完胶的产品进行屏幕的安装压合;当上层托盘要从人工操作位移至下料位时,判断下层托盘是否在点胶,如果下层托盘不在点胶位,上层托盘则直接移至下料位进行下料,如果下层托盘在点胶位,则控制下层托盘下降,对上层托盘让路放行以使上层托盘能够移动至下料位,当上层托盘到达下料位后,下层托盘上升继续完成剩余的点胶动作。
114.所述控制模块还用于控制下层托盘移动至上料位;下层托盘上料;判断上层托盘是否在点胶;若上层托盘在点胶,则待上层托盘点胶完成并离开点胶位时控制下层托盘移动至点胶位进行点胶;若上层托盘没在点胶,则控制下层托盘移动至点胶位进行点胶;下层托盘点胶完成后控制下层托盘移动至人工操作位;人工操作完成后,判断上层托盘是否在点胶;若上层托盘没在点胶,则控制下层托盘移动至下料位;若上层托盘在点胶,则控制上层托盘下降以避位,控制下层托盘移动至下料位。
115.本发明实施例对下层托盘的控制原理和如上所述的上层托盘的控制原理相同;具体的,控制下层托盘移动至上料位,将产品搬运至下层托盘实现下层托盘的上料;当下层托盘要移动至点胶位之前,判断上层托盘是否在点胶,当上层托盘在点胶位时,下层托盘会等待上层托盘点胶完毕并离开后,再控制下层托盘前往点胶位进行点胶,若上层托盘没在点胶,则控制下层托盘移动至点胶位进行点胶;下层托盘点胶完成后,控制下层托盘移动至人工操作位,人工操作位主要对点完胶的产品进行屏幕的安装压合;当下层托盘要从人工操作位移至下料位时,判断上层托盘是否在点胶,如果上层托盘不在点胶位,下层托盘则直接移至下料位进行下料,如果上层托盘在点胶位,则控制上层托盘下降,对下层托盘让路放行以使下层托盘能够移动至下料位,当下层托盘到达下料位后,上层托盘上升继续完成剩余的点胶动作。设备设计为上层托盘和下层托盘的方案,提高了设备的利用率和减少等待时间,基于labview上位机程序,对设备上层托盘和下层托盘进行统一点胶以及运动控制,避免上层托盘和下层托盘动作干扰,提高设备的运行效率。
116.为了解决以上提出的技术问题,本发明实施例还提供了一种点胶设备,采用了如下所述的技术方案:
117.一种点胶设备,包括如上所述的基于labview控制的点胶控制系统。
118.显然,以上所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,附图中给了本发明的较佳实施例,但并不限制本发明的专利范围。本发明可以以许多不同的形式来实现,相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本发明说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本发明专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。