1.本实用新型涉及电池组件生产技术领域,具体地,涉及一种焊接设备。
背景技术:
2.在电池组件生产过程中,电芯模组组装过程中通常需要进行焊接,例如焊接极耳、电路板或者采集线等,传统的焊接方式是在电芯模组上方设置轨道,通过伺服电机带动焊接机构沿轨道运动至待焊接位进行焊接,但是这种焊接方式结构复杂,维修困难,焊接校准困难,而且焊接效率低。
3.为此,需要提供一种结构简单、能够提高焊接效率的焊接设备。
技术实现要素:
4.本实用新型的目的是提供一种焊接设备,以解决现有技术中电芯模组的焊接效率低的问题。
5.为了实现上述目的,本实用新型提供的所述焊接设备包括机械臂焊接装置及压紧装置;其中,
6.所述机械臂焊接装置包括机械臂及设置在所述机械臂上的用于进行焊接的焊接机构;
7.所述压紧装置包括安装主体、移动架、升降驱动机构、横向驱动机构及设置在所述安装主体上的至少一个压头组件,所述移动架设置在所述安装主体两端;所述横向驱动机构与所述移动架连接,并配置为驱动所述移动架横向移动;所述升降驱动机构的固定端与所述移动架固定连接,所述升降驱动机构的驱动端与所述安装主体连接,所述升降驱动机构设置为驱动所述安装主体升降;
8.所述压头组件在所述安装主体带动下压紧待焊接部件时,所述机械臂带着所述焊接机构对待焊接部件进行焊接操作。
9.优选地,所述焊接机构包括安装在所述机械臂上的能够发射激光的激光焊接机以及相机,所述相机用于获取待焊接部件的焊接位置信息,所述激光焊接机根据所述相机获取的所述焊接位置信息对待焊接部件进行焊接。
10.优选地,所述焊接机构还包括距离传感器,所述距离传感器设置为检测所述激光焊接机和/或所述相机与待焊接部位之间的距离。
11.优选地,所述激光焊接机包括激光器及安装在所述激光器下方的镜头,所述激光器发射的激光穿过所述镜头并聚焦到达待焊接部件;
12.所述焊接机构还包括吹气部件,所述吹气部件设置为向预定方向吹气以防止焊接时所产生的尘雾溅射到所述镜头上。
13.优选地,所述焊接设备还包括用于校准所述激光焊接机和所述相机的校准部件。
14.优选地,所述压头组件包括压头主体,其中,
15.所述压头主体弹性安装在所述安装主体上;和/或,所述压头主体设置为能够在所
述安装主体上移动。
16.优选地,所述压头组件还包括安装在所述安装主体上的安装块和调整机构,所述调整机构设置为能够驱动所述安装块移动以调节所述压头主体相对于所述安装主体的位置;
17.所述安装块上设置有导向柱,所述压头主体设置为能够沿所述导向柱相对所述安装块上下移动,所述导向柱上套设有位于所述压头主体和所述安装块之间的弹簧,所述弹簧用于对所述压头主体施加弹力。
18.优选地,所述压头主体上设置有吸气孔,所述压头组件还包括与所述吸气孔连通的吸气管路,所述吸气管路通过所述吸气孔将焊接位置的废料吸走。
19.优选地,所述压头主体上还设置有吹气孔,所述压头组件还包括与所述吹气孔连通的吹气管路,所述吹气管路通过所述吹气孔对焊接位置进行吹气。
20.优选地,所述压头主体最下方的压紧面为长方形。
21.本实用新型提供的焊接设备能够大大提高焊接效率。
22.本实用新型的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
23.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施方式及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
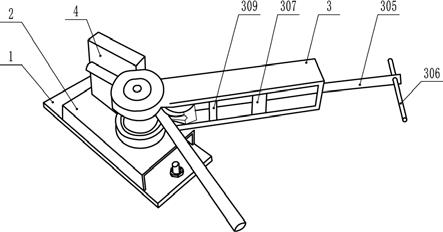
24.图1为根据本实用新型的一个实施方式中焊接设备的结构示意图;
25.图2为焊接设备中机械臂焊接装置的结构示意图;
26.图3为图2的部分放大示意图;
27.图4为压紧装置的结构示意图;
28.图5为图4的部分结构示意图;
29.图6为图5所示结构的侧视图;
30.图7为压头组件的安装结构示意图;
31.图8为压头组件的结构示意图;
32.图9为压头组件中压头主体的结构示意图;
33.图10为压头主体的仰视图。
34.附图标记说明
35.1-机械臂焊接装置;11-机械臂;12-激光器;13-镜头;14-相机;15-光源;16-距离传感器;17-吹气部件;2-压紧装置;21-安装主体;211-安装板;212-立板;213-轨道;22-压头组件;221-压头主体;2211-吹气孔;2212-吸气孔;222-滑板;223-安装块;224-导向柱;225-吸气管路;226-吹气管路;227-调整机构;23-移动架;24-升降驱动机构;25-横向驱动机构;26-升降轨道;27-横移轨道;3-电芯模组承载装置;4-电芯模组;5-第一校准部件;6-第二校准部件。
具体实施方式
36.以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处
所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
37.需要说明的是,在不冲突的情况下,本实用新型中的实施方式及实施方式中的特征可以相互组合。
38.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。另外,“内、外”是指相对于各部件本身的轮廓的内、外。
39.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
40.本实用新型提供一种焊接设备,如图1所示,所述焊接设备包括机械臂焊接装置1及压紧装置2;其中,
41.所述机械臂焊接装置1包括机械臂11及设置在所述机械臂11上的用于进行焊接的焊接机构;
42.所述压紧装置2包括安装主体21、移动架23、升降驱动机构24、横向驱动机构25及设置在所述安装主体21上的至少一个压头组件22,所述移动架23设置在所述安装主体21两端;所述横向驱动机构25与所述移动架23连接,并配置为驱动所述移动架23横向移动;所述升降驱动机构24的固定端与所述移动架23固定连接,所述升降驱动机构24的驱动端与所述安装主体21连接,所述升降驱动机构24设置为驱动所述安装主体21升降;
43.所述压头组件22在所述安装主体21带动下压紧待焊接部件时,所述机械臂11带着所述焊接机构对待焊接部件进行焊接操作。
44.在一个具体实施方式中,如图2和图3所示,所述焊接机构包括安装在所述机械臂11上的能够发射激光的激光焊接机以及相机14,所述相机14用于获取待焊接部件的焊接位置信息,所述激光焊接机根据所述相机14获取的所述焊接位置信息对待焊接部件进行焊接。其中,所述焊接机构还可以包括光源15,相机14借助于光源15能够更好地获取待焊接部件的焊接位置信息。
45.所述焊接机构还包括距离传感器16,所述距离传感器16设置为检测所述激光焊接机和/或所述相机14与待焊接部位之间的距离。根据所述距离传感器16所检测的距离,控制所述机械臂11移动到预定位置,使得相机14在合适的位置获取待焊接部件的位置,以及所述激光焊接机在合适的位置发射激光进行焊接。
46.所述激光焊接机包括激光器12及安装在所述激光器12下方的镜头13,所述激光器12发射的激光穿过所述镜头13并聚焦到达待焊接部件;其中,所述镜头可以是凸透镜或者透镜组,用于将激光器12发射的激光聚焦至待焊接部件上。
47.所述焊接机构还包括吹气部件17,所述吹气部件17设置为向预定方向吹气以防止焊接时所产生的尘雾溅射到所述镜头13上。
48.本实施方式中,所述焊接设备还包括用于校准所述激光焊接机和所述相机14的校准部件,所述校准部件都是标准件。如图1中显示了用于校准激光焊接机的第一校准部件5和用于校准相机14的第二校准部件6,在激光焊接机和相机14实行定位或长期运行后,需要
通过校准部件进行校准。
49.本实用新型提供的技术方案中,能够使得压头组件快速地定位压紧待焊接部件,且通过机械手进行焊接,能够大大提高焊接效率。
50.本实施方式中,如图4-图6所示,所述安装主体21包括安装板211及位于所述安装板211两端的立板212,两端的立板212可升降地安装在所对应端的移动架23上,移动架23上设置有升降轨道26,立板212设置为能够沿所述升降轨道26升降。其中,所述安装主体21还可以包括与安装板211垂直连接的侧板以及位于安装板211下方的底板,所述安装板211、所述侧板和所述底板形成大致为箱型的结构,所述压头组件22位于所述箱型结构中,且压头组件22的下端向下伸出箱型结构(参考图6)。
51.所述压头组件22的结构如图7和图8所示,所述压头组件22包括压头主体221,其中,压头主体221弹性安装在安装主体21上(具体是安装在安装主体21的安装板211上);和/或,所述压头主体221设置为能够在所述安装主体21上移动。
52.进一步的,所述压头组件22还包括安装在所述安装主体21上的安装块223和调整机构227,所述调整机构227设置为能够驱动所述安装块223沿与移动架22的移动方向垂直的方向移动以调节所述压头主体221相对于所述安装主体21的位置。
53.所述安装块223上设置有导向柱224,所述压头主体221设置为能够沿所述导向柱224相对所述安装块223上下移动,所述导向柱224上套设有位于所述压头主体221和所述安装块223之间的弹簧,所述弹簧用于对所述压头主体221施加弹力。
54.更具体的,如图7所示,在安装板211的下表面上设置有轨道213,安装块223安装在滑板222上,所述调整机构227能够驱动所述滑板222沿轨道213滑动,从而滑板222能够带着安装块223及压头主体221移动。其中,所述调整机构227可以包括电机及电机驱动的丝杠机构,所述滑板222由所述丝杠机构驱动。当然,所述调整机构227也可以是气缸。
55.优选地,如图8和图9所示,所述压头主体221上设置有吸气孔2212,所述压头组件22还包括与所述吸气孔2212连通的吸气管路225,所述吸气管路225通过所述吸气孔2212将焊接时产生的废料排出。
56.优选地,所述压头主体221上还设置有吹气孔2211,所述压头组件22还包括与所述吹气孔2211连通的吹气管路226,所述吹气管路226通过所述吹气孔2211对焊接位置进行吹气。
57.优选地,如图10所示,所述压头主体221最下方的压紧面为长方形,长方形的压紧面相比圆形的压紧面,可以实现在间距较窄的位置下进行焊接。
58.优选地,所述压头主体221安装在所述安装块223上的一端的截面较大,而下端的用于压紧的压紧面较小,该压头主体221形成为大致从下端朝向上端截面增大的方锥形。
59.本领域技术人员可以理解的是,所述安装主体21的结构以及压头组件22的结构并不限于本技术中所作的描述,在不脱离本技术保护范围的情况下可以作适应性改变。另外,安装主体21上并不限于安装一个压头组件22,根据待焊接部件在焊接时所要压紧的压紧部位,可以在安装主体21上设置两个或更多个压头组件22。
60.下面对采用本实施方式中所提供的焊接设备对电池组件进行焊接的具体过程进行描述。
61.如图1所示,将承载有电芯模组4的电芯模组承载装置3移动至焊接工位;
62.通过横向驱动机构25驱动移动架23沿横移轨道27移动,调整安装主体21上的压头组件22在第一方向上的位置,并通过调整机构227驱动安装块223带着压头主体221沿第二方向移动(其中所述第二方向垂直于第一方向),调整压头主体221在第二方向上的位置,通过在两个方向上的位置调整使得压头主体221对应于电芯模组4的压紧位置。
63.在压头主体221对应于电芯模组4的压紧位置后,升降驱动机构24驱动安装主体21沿升降轨道26下降,压头主体221下降至压在电芯模组4上,在压头主体221下降的过程中,位于压头主体221与安装块223之间的弹簧被压缩,弹簧对压头主体221施加向下的弹力,使得压头主体221弹性压在电芯模组4上,避免对电芯模组4产生损伤。
64.根据相机14获取的焊接位置信息以及距离传感器16所检测的距离,控制机械臂11移动至预定位置,激光器12朝向焊接位置发射激光进行焊接。
65.其中,在焊接过程中,吹气部件17吹气来避免焊接时所产生的尘雾溅射到所述镜头13上。并且,通过供气机构向吹气管路226吹气,吹气孔2211将焊接位置处的将焊接的灰尘等吹起来,通过抽吸机构对吸气管路225进行抽吸,可以使得被吹起来你的灰尘进入到吸气孔2212,从而吸气管路225将灰尘吸走,可以有效避免焊接位置的灰尘杂质影响焊接质量。
66.以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于此。在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种简单变型,包括各个具体技术特征以任何合适的方式进行组合。为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本实用新型所公开的内容,均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。