1.本发明涉及一种用于调节商用车辆的行驶速度的技术。特别地,描述了一种用于调节行驶速度的装置和一种相应的商用车辆。
背景技术:
2.如今,载重车辆或公共汽车的燃料消耗通过如下措施来优化:在驱动模式下将商用车辆的车道的最大速度例如限制为例如85km/h,而不是90km/h(特别是对于载重车辆)。为了进一步优化,速度调节设备可以将地形图与基于卫星的定位相结合,也称为gps巡航控制。为此,与驾驶员指定的平均速度相比,在驱动模式下上坡时的行驶速度会降低。下坡时在惯性驱动模式下,行驶速度摆动高于平均速度,以弥补之前与平均速度相比损失的时间,而无需使用额外的燃料。
3.由于传统的速度调节设备仅根据可预见的环境条件调节行驶速度,因此商用车辆在爬坡时的行驶速度可能会比最佳的或指定的燃料消耗所需的行驶速度更慢,因此需要更多的行驶时间,例如因为顺风允许以相同的燃料消耗更快地驾驶。相应的考虑也适用于电驱动。
4.此外,传统的速度调节设备甚至会使燃料消耗恶化。由于仅根据可预见的环境条件来调节行驶速度,因此商用车辆在爬坡时可能会为了更高的传动比而降档,从而在驱动模式下以对行驶时间不理想的太低的行驶速度行驶,或以对燃料消耗不理想的太高的马达转速行驶,例如因为由于在爬坡时顺风作用在商用车辆上,根本不需要换档过程。
5.因此,传统的速度调节设备可能无法实现甚至会恶化最佳燃料消耗的目标。
技术实现要素:
6.因此目的是,改进对行驶速度的调节,特别是用于优化行驶时间和/或能耗。
7.该目的通过具有独立权利要求的特征的装置和相应的商用车辆来实现。本发明的有利实施方式和应用是从属权利要求的主题,并且在以下描述中部分参照附图更详细地解释。
8.根据一个方面,提供了一种用于调节商用车辆的行驶速度的装置。该装置包括行驶速度传感器,其被设计用于检测商用车辆的行驶速度。该装置还包括风速传感器或数据接口,其被设计用于检测在商用车辆处或前方的风速。该装置还包括定位单元,该定位单元被设计用于在商用车辆行驶的车道上对商用车辆定位。该装置还包括调节单元,该调节单元被设计用于根据检测到的行驶速度、检测到的风速和根据定位在车道上处于商用车辆前方的地形来调节商用车辆的行驶速度。对于在商用车辆前方的地形,调节的行驶速度是在行驶速度方向上检测到的风速的递增(例如严格单调递增)函数。
9.由于对于在商用车辆前方的地形而调节的行驶速度是在行驶速度方向上检测到的风速的递增函数,在该装置的一个实施例中,在上坡时(作为前方地形的一个例子),调节的行驶速度可以大于单独基于前方地形预先计算的行驶速度,如果在商用车辆参考系统或
车道参考系统中检测的风速在行驶速度方向上为正(这也称为驱动顺风或一般顺风)的话。因此,可以节省或优化行驶时间和/或驱动能量。
10.与前方地形的任何关系都可以实现为与前方车道的倾斜角的关系。倾斜角可以是在纵向方向上的车道与水平面之间的角度。
11.替代地或补充地,倾斜角对于上坡可以是正的,或者对于下坡可以是负的。
12.倾斜角度可以是沿车道的路径长度的函数。例如,与前方地形的关系可以包括与商用车辆所在位置的坡度角和前方车道上的坡度角变化的关系,例如坡度角的一阶和/或二阶导数作为路径长度的函数。
13.调节单元可以根据在行驶速度的目标值(即调节后的行驶速度v
f(soll)
与行驶速度的实际值(即检测到的行驶速度v
f(ist)
)之间的差值v
f(soll)-v
f(ist)
来计算商用车辆的加速(特别是内燃机的燃料喷射和/或电动机的电流调节)和/或减速(特别是制动和/或再生),将其输出至发动机控制器,予以控制和/或调节。
14.借助调节单元对行驶速度的“调节”可以在于,检测到的行驶速度是调节单元的输入参量,即被调节的行驶速度(例如受控的加速或减速)也与检测到的行驶速度有关。
15.在每个实施例中,调节的行驶速度还可以服从速度上限和/或速度下限。当达到速度上限时,调节单元可以将调节的速度限制于该速度上限。调节单元可以防止调节的速度低于速度下限。
16.例如,商用车辆的驾驶员可以设定调节参数。调节参数可以包括平均速度和任选地至少一种相对于平均速度的偏差(例如上偏差和/或下偏差)的大小。调节单元可以根据调节参数来确定相应的限速,并将其应用在调节中。
17.调节单元可以基于与检测到的风速的关系来调节相对于商用车辆的环境空气的行驶速度。例如,在调节行驶速度时,可以相对于风速使用单独根据地形预先计算的行驶速度。商用车辆的被检测和/或调节的行驶速度可以分别计算为商用车辆相对于车道的速度值或予以输出。例如,可以将检测到的风速和单独根据地形预先计算的行驶速度相加,例如加权地相加。
18.检测到的风速(特别是在行驶速度的方向上)可以包括在商用车辆的参考系统中的风速。在商用车辆的参考系统中检测的在行驶速度方向上的风速作为行驶风速可以为负值。
19.调节的行驶速度可以为:
20.(第一方案)v
f(soll)
=v
f(topo)
ε
·v′
w(ist)
(优选在0<v
′
w(ist)
,时使用);或
21.(第二方案)v
f(soll)
=v
f(topo)
ε
·
(v
′w(ist)
v
f(ist)
),
22.其中,v
f(topo)
可以表示根据前方地形预先计算的行驶速度,v
′
w(ist)
可以表示在商用车辆的参考系统中检测的风速,参数ε(0<ε≤1)可以表示对风速的考虑程度,必要时,v
f(ist)
可以表示检测到的行驶速度。
[0023]v′
w(ist)
v
f(ist)
>0的情况也可以称为顺风(例如一般的顺风)。v
′
w(ist)
v
f(ist)
<0的情况也可以称为逆风。v
′
w(ist)
>0的情况也可以称为驱动顺风。根据第一方案的调节可以特别用于驱动顺风(或称为“航行”)。根据第二方案的调节可以在任何情况下使用(或者称为对相对于风速的行驶速度的调节)。
[0024]
替代地或补充地,检测到的风速(特别是在行驶速度的方向上)可以包括在商用车
辆行驶的车道的参考系中的风速。
[0025]
行驶速度的调节可以取决于在行驶速度方向上检测到的风速与检测到的行驶速度之间的差(第一方案),或直接取决于检测到的风速(第二方案)。
[0026]
调节的行驶速度可以为:
[0027]
(第一方案)v
f(soll)
=v
f(topo)
ε
·
(v
w(ist)-v
f(ist)
)(优选在0<v
f(ist)
<v
w(ist)
时使用);或
[0028]
(第二方案)v
f(soll)
=v
f(topo)
ε
·vw(ist)
,
[0029]
其中,v
f(topo)
为根据前方地形预先计算的行驶速度,v
w(ist)
为检测到的在行驶速度方向上的风速,参数ε(0<ε≤1)是对风速的考虑,必要时,v
f(ist)
是检测到的行驶速度。
[0030]vw(ist)
>0的情况也可以称为顺风(例如一般的顺风)。v
w(ist)
<0的情况也可以称为逆风。v
w(ist)
>v
f(ist)
的情况也可以称为驱动顺风。根据第一方案的调节可以特别用于驱动顺风,或称为“航行”。根据第二方案的调节可以在任何情况下使用,或者称为对相对于风速的行驶速度的调节。
[0031]
可以参照车道(即在车道的静止参考系统中)确定基于前方地形预先计算的行驶速度。
[0032]
考虑风速的程度的参数ε可以取决于前方地形和/或商用车辆的驱动系的效率优化的工作点或工作范围。
[0033]
由顺风(例如驱动顺风,甚至一般的顺风更是如此)提供给商用车辆的机械功率可能小于对于维持被调节的行驶速度所需的驱动功率(例如由于上坡阻力和/或滚动阻力)。例如,在平面的车道上,由于滚动阻力,需要驱动系的功率,即使要达到在相应第一方案中的行驶速度目标值(例如目标值v
f(topo)
v
w(ist)-v
f(ist)
=v
f(topo)
v
′
w(ist)
,ε=1,即以便完全消除在驱动顺风时的空气阻力),在第二方案中更是如此(例如如果风速根本就不允许消除空气阻力)。
[0034]
在一个实施例中,在下坡的情况下,高度能量(即重力场的势能)可以产生必要的驱动功率,使得(例如在第一或第二方案中)在下坡的情况下(作为前方地形的一个例子)可以有ε=1。与ε=1时的行驶速度目标值(例如在第一或第二方案中)相比,在上坡的情况下,除了高度能量外,驱动系还克服空气阻力例如仅部分地做功,以便在效率优化的运行范围内工作,从而在上坡的情况下(作为前方地形的示例)可以有0<ε<1。
[0035]
在每个实施例中,驱动系可以包括内燃机和/或电动机(电机)。
[0036]
数据接口可以包括接至服务器的无线电数据接口。服务器可以提供天气数据。天气数据可以包括位于所定位的商用车辆处或前方的风速。
[0037]
无线电数据接口可以被设计用于通过蜂窝移动无线电网络进行数据交换。无线电数据接口和/或蜂窝移动无线电网络可以根据“第三代合作伙伴计划”(3gpp)的标准、特别是“长期演进”(lte)或“第五代新无线电(5g nr)”的标准采用无线电接入技术进行通信。
[0038]
检测的风速可以基于卫星摄像和/或近地面的测量。例如,天气数据可以包括飞行天气数据。可以通过测量站的网络,平行于车道(尤其是沿着高速公路)检测近地面的测量。
[0039]
风速传感器可以包括应变仪,例如在商用车辆的底盘和车身之间,特别是在商用车辆的底盘和驾驶室之间。应变仪可以被设计用来检测与在商用车辆的参考系统中的风速相关的动压,可选地包括降水的冲击压力。
[0040]
应变仪可以布置在商用车辆的底盘(也称为基架或框架)和商用车辆的车身(特别是前部)之间。替代地或补充地,应变仪可以布置在商用车辆的前部内,例如布置在前部的竖直表面部分上。
[0041]
降水可以包括雨滴和/或雪和/或冰雹。降水对车身(尤其是驾驶室)的冲击可以将降水冲量的水平分量传递到车身上。单位时间和单位面积传递的冲量的水平分量可以对应于冲击压力。动压可以由因空气阻力引起的空气动压和冲击压力组成。
[0042]
风速传感器可以包括布置在商用车辆的前部的至少一个动压探头(例如皮托管或普朗特皮托管)。每个动压探头都可以被设计用于检测与在商用车辆参考系统中的风速有关的动压。为了检测风速,至少一个动压探头可以另外包括用于测量静压分量的静压探头。
[0043]
在风速传感器的任何实施方式中,动压可以包括在总水平压力分量与静压力分量之间的差。例如,动压探头可以从静压分量中减去总水平压力分量。应变计可以检测动压。
[0044]
测得的动压可以是用它检测的风速的二次函数。
[0045]
如果检测到的行驶速度和/或基于前方地形预先计算的行驶速度超过最小速度,例如大于60km/h,则调节的行驶速度通常可以取决于检测到的风速。在最低速度以下,在调节行驶速度时可以不考虑风速。
[0046]
调节单元还可以被设计用于在调节行驶速度时考虑在商用车辆的驱动系中的自动变速器的换档点(其取决于行驶速度)。例如,如果前方地形具有上坡并且检测到的风速对应于顺风,则单独根据地形预先计算的行驶速度可以低于换档点,并且调节的行驶速度可以大于换档点。
[0047]
根据另一方面,提出了一种用于调节商用车辆的行驶速度的装置。该装置包括行驶速度传感器,其被设计用于检测商用车辆的行驶速度。该装置还包括无线电数据接口,其被设计用于从服务器检测在商用车辆处或前方的风速。服务器提供数据,这些数据包括在商用车辆处或前方的风速。该装置还包括调节单元,该调节单元被设计用于根据检测到的行驶速度和检测到的风速来调节商用车辆的行驶速度。调节的行驶速度是(例如对于在商用车辆前方的地形)在行驶速度方向上检测到的风速的递增(例如严格单调递增)函数。
[0048]
该装置还可以包括定位单元,该定位单元被设计用于在商用车辆行驶的车道上将商用车辆定位。所定位的商用车辆的位置数据可以通过无线电数据接口(例如从调节单元)发送到服务器。由服务器经由无线电数据接口调用的数据可以包括在所定位的商用车辆处或前方检测的风速。
[0049]
根据另一方面的装置还可以包括在首先提到的方面的上下文中描述的一个或多个特征。
[0050]
根据又一方面,提出了一种机动车辆,特别是商用车辆,其驱动系包括根据上述方面的采用这些设计变型之一的装置或由这种装置控制。
[0051]
在任何方面,商用车辆可以是载重车辆、牵引机车或公共汽车。
附图说明
[0052]
下面参照附图描述本发明的其它特征和优点。
[0053]
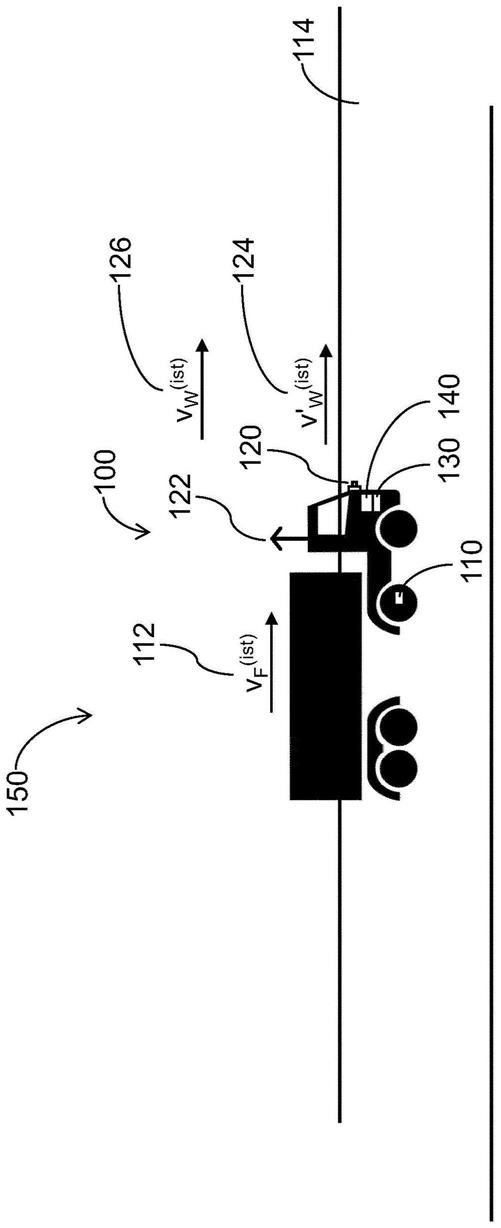
图1是示例性商用车辆的示意性侧视图,其具有用于调节商用车辆的行驶速度的装置的实施例;
[0054]
图2a是沿车道的示意性高度分布图,在车道的参考系统中具有位置相关的风速;
[0055]
图2b是调节的行驶速度和仅基于图2a的高度分布图预先计算的沿行驶路径的行驶速度的示意性曲线图,同时考虑了位置相关的风速;和
[0056]
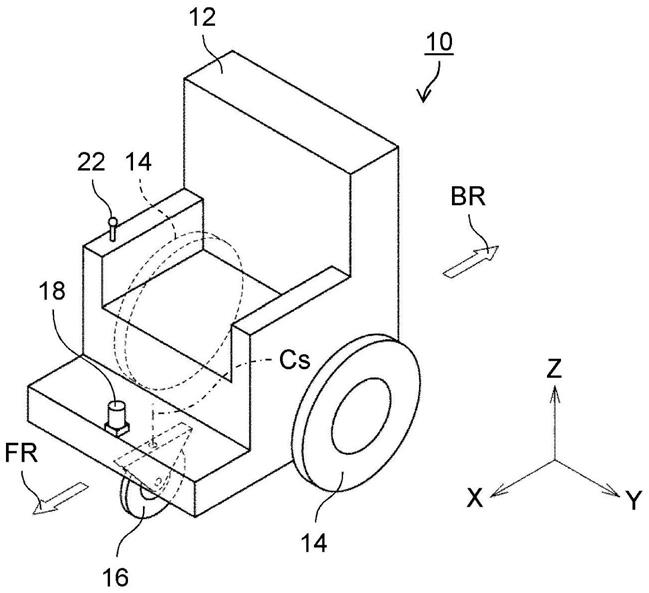
图3是在商用车辆前部的风速传感器的实施例的立体图。
具体实施方式
[0057]
图1示意性地示出了示例性商用车辆150(例如载重车辆或公共汽车),其具有用于调节商用车辆150的行驶速度的装置,通常由附图标记100表示。
[0058]
装置100的第一实施例包括行驶速度传感器110、风速传感器120和/或数据接口122、定位单元130和调节单元140。
[0059]
行驶速度传感器110检测商用车辆150的行驶速度112。风速传感器120和/或数据接口122检测在商用车辆(150)处或前方的风速124或126。在商用车辆150的参考系统中测量风速124。风速126在商用车辆150的车道114(例如街道或高速公路)的参考系统中被测量。定位单元130例如通过全球卫星导航系统(特别是“全球定位系统”或gps;全球卫星导航系统glonass;“galileo”和/或“北斗”)和/或蜂窝移动无线电网络(尤其是4g lte或5g nr)在商用车辆150正在行驶的车道114上对商用车辆150定位。
[0060]
调节单元140被设计成根据检测到的行驶速度112、检测到的风速124和/或126以及按照在车道114上的定位而位于商用车辆150前方的地形200来调节商用车辆150的行驶速度。对于位于商用车辆150前方的地形200,调节的行驶速度是在行驶速度方向上检测到的风速124和/或126的递增函数。
[0061]
装置100的可与第一实施例组合的第二实施例包括行驶速度传感器110、无线电数据接口122和调节单元140。
[0062]
行驶速度传感器110检测商用车辆150的行驶速度112。
[0063]
无线电数据接口122从服务器检测在商用车辆150处或前方的风速126。服务器提供(例如在商用车辆150的车道114的参考系统中)指明风速126的数据。调节单元140可以设计为通过无线电数据接口从服务器查询数据。如有必要,调节单元140可以通过检测到的行驶速度112把在路径114的参考系中的风速126换算为在商用车辆的参考系中的风速124。
[0064]
调节单元140被设计成根据检测到的行驶速度112和检测到的风速124和/或126来调节商用车辆150的行驶速度。调节的行驶速度210(例如对于位于商用车辆150前方的地形200)是在行驶速度方向上检测到的风速124和/或126的递增函数。
[0065]
在每个实施例中,平均速度,也称为巡航速度,可以预定和/或在装置100上设定。优化(即最小化)驱动能量(例如驱动材料消耗或使用化石燃料的co2排放)和巡航速度从根本上是一个目标冲突,因为在行驶速度大于最小速度(例如大于60km/h)时,随着行驶速度的平方而增加的空气阻力会导致驱动能量的显著的或主要的部分。
[0066]
在每个实施例中,调节单元140可以借助相对于在商用车辆150周围的空气的行驶速度来调节在商用车辆150的车道114上(即相对于该车道)的行驶速度,使得当行驶速度大于最小速度时,优化在驱动能量和巡航速度之间的目标冲突。调节可以单独进行,或与传统速度调节设备(例如gps巡航控制)的机构结合进行。
[0067]
如果商用车辆150以检测到的行驶速度112(例如80km/h)在车道114上移动并且没
有风(即在车道114的参考系统中的风速126为零,或者相对于检测到的行驶速度112是小的),则相对于空气的行驶速度与检测到的行驶速度112相同(即通过空气的行驶速度例如也是80km/h)。相应地表现出了正常的空气阻力。然而,如果有10km/h的逆风(即在车道114的参考系统中的风速126在行驶速度方向上等于-10km/h),则空气阻力作用于商用车辆150,该空气阻力对应于在无风时在车道114上的90km/h的行驶速度。装置100使得能够检测相对于空气的行驶速度(即在商用车辆150的参考系统中的负风速124),并且能够据此调节行驶速度。也就是说,在车道114上的调节的行驶速度可以根据相对于空气的行驶速度来调节。
[0068]
可以通过内部传感器即风速传感器120、或外部传感器即通过数据接口122(特别是无线电数据接口122)来检测通过空气的行驶速度。风速测量装置120可以包括风速仪、动压管或间接的动压测量例如通过在商用车辆150的驾驶室的承载点处的应变计(dms)予以测量。服务器的数据(特别是天气数据)可以是本地的、位置触发的天气数据,例如参考来自互联网的gps。根据对商用车辆150的定位,通过将数据与行驶方向和/或位置进行比较来检测在商用车辆150处或前面的风速。可以使用基于卫星的全球导航系统(例如gps信号)、商用车辆150的车载(例如基于地图的)导航系统或两者的组合来执行该定位。
[0069]
调节系统可以以行驶速度相对于车道的临时超调的形式利用顺风。由此可以至少部分地补偿逆风中的时间损失。
[0070]
在调节单元140的第一实施方式中,例如在装置100的第一实施例中,调节单元140基于通过空气的行驶速度(即在商用车辆150的参考系统中的行驶风速或负风速124),通过以下方式调节相对于商用车辆150的车道114的行驶速度:在行驶速度大于60km/h时优化燃料消耗(化石燃料情况下的co2排放)与平均巡航速度的目标冲突。该调节可以称为“航空自适应高效巡航”(aaec)和/或仅根据地形预先计算的行驶速度的改进。
[0071]
因此,该装置的实施例可以与根据当今的现有技术的机构(例如,gps巡航控制)组合来实现。只有通过将风速考虑在内,才能与地形协同地实现对上述目标冲突的进一步优化。
[0072]
例如,商用车辆150以80km/h的行驶速度移动,并且没有风。于是风速是80km/h。相应地,表现出了通常的空气阻力。但是,如果有10km/h的逆风,则表现出与在无风时的90km/h的行驶速度相对应的空气阻力。在此,行驶风速以平方包含在空气阻力中。
[0073]
装置100的实施例可以在逆风的情况下降低商用车辆150的被调节的行驶速度,以节省燃料,并且在顺风的情况下在法律允许的框架内提高该行驶速度,以弥补在减速时损失的行驶时间。例如,优化效果与仅基于地形预先计算的行驶速度的效果(例如通过传统的gps巡航控制)相加地或超比例地(由于平方的速度相关性)出现。
[0074]
图2a和2b示意性地示出了通过将传统的纯基于地形的调节(例如gps巡航控制)扩展到装置100的实施例(例如aaec控制)的协同效应。在图2a中,示出了在车道114的参考系统中的风速126和车道114的相关地形200(特别是高度分布图)。
[0075]
在此,因为在长期内由于天气变化、车道改变或没有天气变化的闭合车道(例如因为载重车辆在往返行程上行驶),逆风202和顺风204同样频繁,因此优化效果是综合发生的(例如在一天内或在许多天内)。平均而言,以较少的驱动能量实现了预给定的巡航速度214。
[0076]
在逆风202的情况下,调节的行驶速度210低于单独根据地形预先计算的行驶速度212,因为调节的行驶速度210与检测的风速124或126的关系在给定地形200情况下是严格单调递增的函数。由此,在逆风202的情况下,由于空气阻力的平方的速度关系,节省了驱动能量。这种节省在附图标记220处示出。
[0077]
在顺风204的情况下,调节的行驶速度210大于单独根据地形预先计算的行驶速度212,因为调节的行驶速度210与检测的风速124或126的关系在给定地形200情况下是严格单调递增的函数。由此,在顺风204的情况下,弥补以前在逆风时损失的时间。该时间节省在附图标记222处示出。
[0078]
由于空气阻力的平方的速度关系,与逆风202时的节省220相比,顺风时的较高行驶速度210与更少的额外的驱动能量关联,从而在没有任何时间损失的情况下在总体上节省驱动能量。
[0079]
行驶风速(即在商用车辆150的参考系统中的负风速124)在此通过风速传感器120在内部确定,或者通过数据接口122在外部结合检测到的行驶速度确定。
[0080]
图3示意性地示出了商用车辆150的立体图,在商用车辆150的前部300上具有风速传感器120的实施例。商用车辆150上的该传感系统用于确定行驶风速,即(除了符号外)在商用车辆150的参考系统中的风速124。
[0081]
作为风速传感器120的动压探头可以在商用车辆150的前部300上布置在前灯上方或空气引导开口302中。
[0082]
尽管在图3的实施例中,动压探头被示为风速传感器120,但替代地或补充地,可以把现有的马达风扇用作风速传感器120,例如用作根据公开文献de 10 2012 220 406 a1的风速仪。
[0083]
在调节行驶速度210时,调节单元140优选地还根据情况考虑可能的换档策略。在这里,总体上也出现节能效果。图2b中示意性地示出的被调节的行驶速度210在假设上甚至无法与以恒定燃料喷射量或恒定油门踏板位置的行驶相比,因为商用车辆(例如载重车辆)的这种驾驶操作是不可能的。如果想在平路上遵守法定的最高速度,那么在较大的斜坡上(即对于上坡车道),行驶速度会下降到无法接受的低值。相反,在平路上将超过最大允许速度(例如载重车辆)。
[0084]
装置100的第二实施方式,例如第二实施例,基于通过空气的行驶速度(即行驶风速)来调节车道上的行驶速度,从而对燃料消耗(化石燃料情况下的co2排放)和平均巡航速度的目标冲突进行优化。该调节基于经由无线电数据接口122来自服务器(例如来自互联网)的关于区域风速和风向的数据进行。第二实施例可以是“增强现实”或“web 4.0”的实现。
[0085]
如果商用车辆以80km/h的行驶速度移动且无风,则行驶风速也为80km/h。相应地表现出了正常的空气阻力。但是,如果有10km/h的逆风,则表现出与无风时90km/h的行驶速度相对应的空气阻力。在此,行驶风速以平方地计入到空气阻力中。第二实施例的一种实现方式从无线电数据接口122的外部数据导出行驶风速。对行驶速度210的调节包括在逆风202的情况下降低行驶速度以便节省燃料,以及在顺风204的情况下在法律允许的框架内提高行驶速度以便补偿在逆风202时损失的行驶时间。在此经过若干天,在总体上出现优化效果,因为逆风和顺风因气候和车道管理而保持平衡(例如因为载重车辆在往返行程上行
驶)。
[0086]
在此,在商用车辆150的参考系统中对行驶风速或风速124的检测,通过在信息技术的支持下,比较来自互联网的区域天气数据与基于定位(例如使用gps和/或车载导航系统)的商用车辆当前位置和/或路线来进行。比较的结果是相对于商用车辆150的坐标系的行驶风速。由于总体上的优化效果,使用区域天气数据代替精确的局部天气数据就足够了。如借助以上示例性实施例所示,风强度和风向对在最小驱动能量与预定的或最少的行驶时间之间的目标冲突的影响,可以通过根据检测到的风速的调节来确定。在第一实施例中,结合前方的地形,可以实现超比例地节省驱动能量。在可与第一实施例相结合的第二实施例中,外部测量(例如报告给服务器的车队的移动测量、联网的固定测量点或基于卫星的空气流量测量)可以是检测到的风速的基础。
[0087]
尽管已借助实施例介绍了本发明,但对于本领域技术人员显然的是,可以进行不同的改变,且可以采用对等物作为替代。此外,可以进行许多修改,以使特定的驾驶情况或特定的驱动系适应于本发明的教导。因此,本发明不应局限于所公开的实施例,而是应涵盖落入所附权利要求的范围内的全部实施例。
[0088]
附图标记清单
[0089]
100 用于调节商用车辆的行驶速度的装置
[0090]
110 行驶速度传感器
[0091]
112 行驶速度
[0092]
114 车道
[0093]
120 风速传感器
[0094]
122 数据接口,特别是无线电数据接口
[0095]
124 在商用车辆的参考系统中的风速
[0096]
126 在车道的参考系统中的风速
[0097]
130 定位单元
[0098]
140 调节单元
[0099]
150 商用车辆
[0100]
200 地形,尤其是高度分布图
[0101]
210 调节的行驶速度
[0102]
212 根据地形预先计算的行驶速度
[0103]
214 预给定的平均速度
[0104]
220 能量节省
[0105]
222 时间节省。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。