1.本公开涉及使多个移动体进行队列行驶的队列行驶系统。
背景技术:
2.作为移动体的队列行驶的技术,已知如下技术:由设于移动体的前侧的测距传感器检测前方的移动体,在追随该前方的移动体的同时行驶。例如在专利文献1中公开了如下技术:在例如进入死路等不能进行u形转向的场所时,通过使队列沿着到这里为止的路径后退,来使该队列从该场所移动。
3.现有技术文献
4.专利文献
5.专利文献1:jp特开2001-43498号公报
技术实现要素:
6.根据本公开的一个方式,提供一种队列行驶系统,使多个移动体进行队列行驶,该队列行驶系统具有:能进行原地转向的多个移动体;和控制多个移动体的行驶的控制装置,所述控制装置在使所述多个移动体的队列停止时,在所述多个移动体各自空出能进行180度的原地转向的给定的移动体间距离的状态下,使所述移动体分别停止。
附图说明
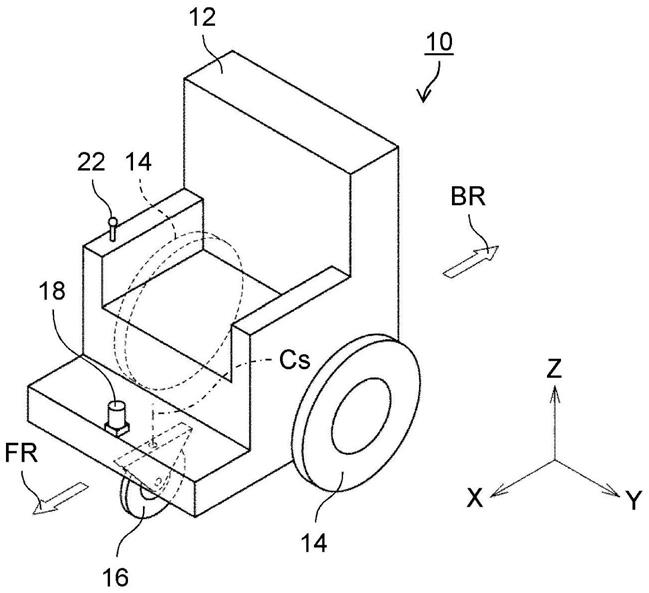
7.图1a是本公开的一个实施方式所涉及的队列行驶系统中的移动体的前方立体图。
8.图1b是移动体的后方立体图。
9.图2是移动体的顶视图。
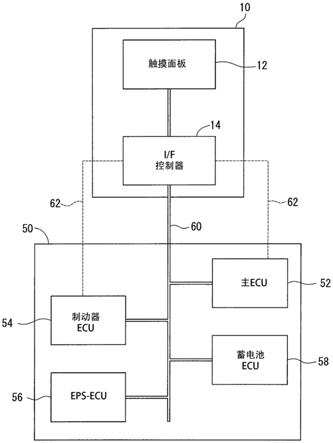
10.图3是移动体的控制系统的框图。
11.图4是表示队列行驶中的多个移动体的移动体间距离的图。
12.图5是表示移动体间距离与队列排头的移动体的行驶速度的关系的图。
13.图6a是用于说明机场航站楼中的多个移动体的队列行驶的一例的图。
14.图6b是接着图6a用于说明多个移动体的队列行驶的图。
15.图6c是接着图6b用于说明多个移动体的队列行驶的图。
16.图6d是接着图6c用于说明多个移动体的队列行驶的图。
17.图6e是接着图6d用于说明多个移动体的队列行驶的图。
18.图6f是接着图6e用于说明多个移动体的队列行驶的图。
19.附图标记说明
20.10a~10d 移动体
21.30 控制装置
具体实施方式
22.在专利文献1记载的技术的情况下,为了从死路等不能进行u形转向的场所移动,在维持队列的关系的状态下,多个移动体各自后退。这时,需要确认多个移动体的后方。另外,在移动体上搭乘有利用者的情况下,有可能由于移动体的后退而使利用者感到不安。
23.因此,本公开的课题在于,使多个移动体各自从死路等不能进行u形转向的场所在维持队列的关系的状态下不后退地移动。
24.以下适宜参考附图来详细说明实施方式。但有时会省略必要以上详细的说明。例如有时会省略针对已经广为人知的事项的详细说明、实质相同的结构的重复说明。这是为了避免以下的说明不必要地变得冗长,使本领域技术人员的理解容易。
25.另外,发明者(们)为了本领域技术人员充分理解本公开而提供了附图以及以下的说明,但意图并不在于由此来限定权利要求书记载的主题。
26.以下参考附图来说明本公开的实施方式所涉及的队列行驶系统。
27.图1a以及图1b是概略地表示本公开的一个实施方式所涉及的队列行驶系统中的移动体的立体图。图1a是移动体的前方立体图,图1b是移动体的后方立体图。另外,图2是移动体的概略顶视图。另外,在附图中,x轴方向表示移动体的前后方向,y轴方向表示宽度方向,z轴方向表示高度方向。
28.如图1a以及图1b所示那样,队列行驶系统中所包含的多个移动体10各自具有:主体12;设于主体12的宽度方向(y轴方向)的两侧的一对驱动轮14;设于驱动轮14的前方的准轮16;设于主体12的前侧的测距传感器18;和设于主体12的后侧的反射构件20。另外,在本实施方式的情况下,移动体10能搭乘利用者,且具有用于该利用者操作移动体10的操纵杆等操作部22。
29.如图2所示那样,一对驱动轮14设于移动体10的主体12,且使得各自的转动中心线cr位于同一直线上。通过一对驱动轮14各自进行正转,从而移动体10向前方fr移动(前进)。另外,通过一对驱动轮14各自进行反转,从而移动体10向后方br移动(后退)。并且,通过一个驱动轮14正转而另一个驱动轮14反转,从而移动体10进行原地转向。该转向中心线cp位于驱动轮14的转动中心线cr上。
30.关于原地转向,该转向中心线cp位于移动体10的宽度方向(y轴方向)的中心,且位于从移动体10的前端离开距离l1的位置。该距离l1比移动体10的全长lt(从前端到后端的距离)的一半大。因此,移动体10在执行原地转向时,需要以转向中心线cp为中心的圆形形状的转向空间sp。即,在转向空间sp内存在障碍物的情况下,移动体10不能执行原地转向。另外,该转向空间ps的半径(最小转向半径)rp由移动体10的形状决定。
31.如图1a所示那样,准轮16能以在高度方向(z轴方向)上延伸的摇动中心线cs为中心进行摇动,且能自由转动地设于移动体10的主体12。
32.如图1a所示那样,测距传感器18是激光测距传感器,设于移动体10的主体12的前侧。测距传感器18用于取得移动体10的周围环境的信息,在本实施方式中,特别为了取得与其他移动体的距离的信息而使用。
33.如图1b所示那样,反射构件20是由测距传感器18检测的对象,反射从测距传感器18输出的激光。反射构件20设于移动体10的主体12的后侧。
34.如图1a所示那样,操作部22设于移动体10的主体12,是用于接受搭乘在移动体10
的利用者的与移动体10的动作相关的指示的设备。
35.图3是移动体的控制系统的框图。
36.如图3所示那样,移动体10具有控制装置30。控制装置30包含判别部32、路径生成部34、智能部36、驱动轮控制部38和通信部40。
37.移动体10的控制装置30例如由cpu和存储使cpu动作的程序的存储器件构成。cpu通过遵循程序进行动作,从而作为判别部32、路径生成部34、智能部36、驱动轮控制部38以及通信部40起作用。另外,也可以对判别部32、路径生成部34、智能部36、驱动轮控制部38以及通信部40分别各准备1个cpu等处理器。在该情况下,可以通过移动体10的外部的服务器来集中管理移动体10各自的路径信息。
38.控制装置30的判别部32基于测距传感器18的检测结果来判别与搭载有该测距传感器18的移动体10不同的移动体10中的反射构件20。具体地,判别部32基于测距传感器18的检测结果来判别移动体10的周围的反射构件20的存在,在存在的情况下,取得关于到该反射构件20的距离和该反射构件20所存在的方向的信息。由此,能判别在移动体10的周围是否存在其他移动体10,并且,在存在的情况下,能取得关于到其他移动体10的距离(移动体间距离)和该其他移动体10所存在的方向的信息。
39.控制装置30的路径生成部34生成移动体10应移动的路径。例如,路径生成部34基于经由操作部22由利用者输入的目的停止场所的信息和移动体10的当前地的信息,来生成从当前地到目的停止场所的路径。
40.控制装置30的智能部36基于测距传感器18的检测结果来补正由路径生成部34生成的路径。另外,智能部36基于测距传感器18的检测结果来算出由判别部32判别的到移动体10的距离(移动体间距离)。
41.具体地,智能部36基于测距传感器18的检测结果来判断由路径生成部34生成的路径上的障碍物的存在。在存在障碍物的情况下,补正该路径,以便能回避该障碍物。另外,在多个移动体10的队列行驶中,智能部36基于测距传感器18的检测结果来算出到追随对象即在前方移动的其他移动体10的距离(移动体间距离)。另外,之后叙述队列行驶的详细情况。
42.控制装置30的驱动轮控制部38通过控制与一对驱动轮14连结的电动机42来控制一对驱动轮14的转动。例如,驱动轮控制部38基于利用者(搭乘者)对操作部22的操作输入来控制驱动轮14的转动。另外,为了调节移动体10的行驶速度,驱动轮控制部38控制驱动轮14的转动。进而,在队列行驶中,为了控制移动体间距离,驱动轮控制部38控制驱动轮14的转动。另外,之后叙述队列行驶的详细情况。
43.控制装置30的通信部40经由通信设备44来与其他移动体10进行通信。另外,通信部40与利用者所携带的通信终端(未图示)进行通信。
44.到这里为止说明了移动体10的结构。从这里起说明多个移动体10的队列行驶。在队列行驶中,队列排头的移动体10和其他移动体10的行驶动作不同。
45.首先,作为队列的排头的移动体10执行手动行驶或自主行驶。
46.在手动行驶的情况下,队列排头的移动体10基于利用者(搭乘者)对操作部22的操作输入来行驶。作为替代方案,也可以是排头的移动体10基于未搭乘在该移动体10的利用者对通信终端的操作输入来行驶。
47.在自主行驶的情况下,队列排头的移动体10从利用者取得目的停止场所、该停止
场所的抵达时间等信息,来作为自主行驶所需的信息。例如在操作部22包含操作面板(未图示)的情况下,这些信息经由该操作面板取得。作为替代方案,也可以经由利用者的通信终端取得这些信息。队列排头的移动体10即其控制装置30的路径生成部34基于这些信息来生成路径。然后,排头的移动体10按照该生成的路径来执行自主行驶。
48.在队列中,排头的移动体10以外的移动体10执行自主行驶。具体地,执行追随在前方行驶的移动体10的追随行驶。在执行追随行驶的移动体10中,其判别部32基于测距传感器18的检测结果来判别前方的移动体10,取得到该前方的移动体10的距离以及方向的信息。路径生成部34基于该取得的距离以及方向,生成沿着在前方行驶的移动体10的路径来行驶的路径。由此,执行追随行驶的移动体10能追随在前方行驶的移动体10,其结果,多个移动体10能执行队列行驶。
49.这里起说明多个移动体的队列中的移动体间距离的控制。
50.图4是表示队列行驶中的多个移动体的移动体间距离的图。
51.如图4所示那样,追随队列中位于排头侧的移动体10(图中左侧的移动体)的移动体10(图中右侧的移动体)空出移动体间距离df来进行追随行驶。移动体间距离df是从排头侧的移动体10(左侧)的后端到追随其的移动体10(右侧)的前端的距离。除排头的移动体10以外的其他移动体10各自相对于前方的移动体10空出移动体间距离df来行驶。为此,测距传感器18具备能检测离开移动体间距离df的移动体10的反射构件20的检测范围。
52.该移动体间距离df通过队列排头的移动体的行驶速度来调整。
53.图5表示移动体间距离与队列排头的移动体的行驶速度的关系。
54.如图5所示那样,若队列排头的移动体10的行驶速度v增加,则除该队列排头的移动体10以外的其他移动体10的移动体间距离df就增加。由此,除排头的移动体10以外的其他移动体10在相对于前方的移动体10确保了制动距离以上的移动体间距离df的状态下执行追随行驶。即,若队列排头的移动体10开始行驶,则除该队列排头的移动体10以外的其他移动体10若相对于前方的移动体10的移动体间距离df成为df1,就开始行驶。
55.另外,若队列排头的移动体10的行驶速度v减小,则除该队列排头的移动体10以外的其他移动体10的移动体间距离df就减小。若最终队列排头的移动体10的行驶速度v成为零(即若停止),则除队列排头的移动体10以外的其他移动体10就在相对于前方的移动体10空出移动体间距离df1的状态下停止。停止中时的队列长度优选较短,因此移动体间距离df1优选较小。
56.另外,在本实施方式的情况下,还基于队列的停止场所来控制移动体间距离。举出多个移动体在机场航站楼进行队列行驶的示例来说明这一情况。
57.图6a~6f是用于说明机场航站楼中的多个移动体的队列行驶的一例的图。另外,在图6a~图6f分别示出4台移动体。为了区别这4台移动体,对4台移动体标注附图标记10a~10d。
58.如图6a所示那样,在机场航站楼设有容纳多个移动体10a~10d的容纳场所t0和多个登机口t1~t3。在此,说明如下示例:多个移动体10a~10d的队列从容纳场所t0向登机口t1(停止场所)移动,并在该登机口t1停止,然后从登机口t1再次返回容纳场所t0。
59.如图6a所示那样,在容纳场所t0,多个移动体10a~10d在排列成一列的状态下停止。具体地,移动体10b在移动体10a的后方停止,移动体10c在移动体10b的后方停止,移动
体10d在移动体10c的后方停止。
60.首先,利用者(例如机场工作人员)对多个移动体10a~10d的队列进行编组。例如,机场工作人员经由多个移动体10a~10d中的任意一者的操作部22来将多个移动体10a~10d分组成1个队列。作为替代方案,也可以经由机场工作人员所携带的通信终端来将多个移动体10a~10d分组。这时,由机场工作人员决定作为队列的排头的移动体(这里是移动体10a)。例如,机场工作人员将具备在分组时操作的操作部22的移动体决定为队列的排头。另外,在分组时,也可以是不仅决定排头的移动体,还决定多个移动体的队列顺序。例如,也可以在决定了排头的移动体后将剩余的移动体与该排头的移动体建立对应的情况下,将该建立对应的顺序作为队列顺序。
61.在多个移动体10a~10d的队列编组完成后,如图6b所示那样,多个移动体10a~10d向作为目的停止场所的登机口t1行驶。
62.在队列排头的移动体10a以手动行驶进行行驶的情况下,机场工作人员搭乘于排头的移动体10a,经由操作部22来操作移动体10a。这时,在从容纳场所t0向登机口t1运送利用者(乘客)的情况下,在剩余的各个移动体10b~10d上搭乘乘客。在去迎接位于登机口t1的乘客的情况下,剩余的移动体10b~10d也可以是空的状态。
63.作为替代方案,机场工作人员也可以不搭乘于排头的移动体10a,而经由所携带的通信终端来操作排头的移动体10a。在该情况下,机场工作人员同移动体的队列一起徒步移动。这时,也可以在排头的移动体10a上搭乘乘客。
64.在排头的移动体10a进行自主行驶的情况下,机场工作人员经由排头的移动体10a的操作部22或通信终端来输入自主行驶所需的信息。在此,作为目的停止场所的信息,输入登机口t1的信息。排头的移动体10a的控制装置30的路径生成部34基于输入信息来生成前往目的停止场所的路径。在自主行驶的情况下,机场工作人员也可以不与队列偕同。
65.若排头的移动体10a开始基于手动行驶或自主行驶的前往目的停止场所的行驶,则其后方的移动体10b就开始追随移动体10a,且其后方的移动体10c就开始追随移动体10b,并且,其后方的移动体10d就开始追随移动体10c。由此,多个移动体10a~10d向登机口t1进行队列行驶。
66.如图6c所示那样,若多个移动体10a~10d的队列接近登机口t1,则移动体10b~10d各自的移动体间距离df就会扩大。
67.具体地,若多个移动体10a~10d的队列接近登机口t1,则如图5所示那样,队列的行驶模式就从第1行驶模式(实线)切换成第2行驶模式(一点划线)。
68.第2行驶模式是如下那样的模式:在队列抵达停止场所时,多个移动体10a~10d各自行驶,以便能在空出能进行180度的原地转向的给定的移动体间距离df2的状态下停止。因此,如图5所示那样,第2行驶模式时的行驶中的移动体间距离df考虑制动距离而比df2大,且比第1行驶模式时的行驶中的移动体间距离df大。
69.另外,第2行驶模式下行驶速度v为零时(即停止时)的移动体间距离df2比第1行驶模式下行驶速度v为零时的移动体间距离df1大。这是因为,作为目的停止场所的登机口t1是死路,不能进行多个移动体的u形转向,为此,是进行再移动时需要进行180度的原地转向的场所。即,第2行驶模式是在停止场所有可能进行180度的原地转向的情况下的行驶模式,第1行驶模式是在停止场所没有可能执行180度的原地转向的情况下的行驶模式。
70.从其他观点来说,在本实施方式的情况下,考虑不需要在停止场所执行180度的原地转向的情况、抵达停止场所前暂时停止的可能性,存在第1行驶模式。第1行驶模式下行驶速度v为零时(即停止时)的移动体间距离df1比180度的原地转向所需的移动体间距离df2小。由此,抑制了停止中的队列长度不必要地变长,可减小停止中的队列的占有空间。
71.在队列排头的移动体10以手动行驶进行行驶的情况下,从机场工作人员对移动体10a通知接近登机口t1。即,由机场工作人员执行向第2行驶模式的切换。该向第2行驶模式的切换经由队列排头的移动体10a的操作部22或经由所携带的通信终端来执行。
72.在队列排头的移动体10a以自主行驶进行行驶的情况下,作为停止场所的信息,将该停止场所是不能进行移动体的u形转向的场所的意思的信息预先从机场工作人员给到移动体10a的控制装置30。基于该信息,队列排头的移动体10a若接近停止场所(若接近到为了在空出移动体间距离df2的状态下在停止场所停止而需要的距离),就切换成第2行驶模式。
73.若在队列排头的移动体10a中执行向第2行驶模式的切换,则排头的移动体10a的控制装置30就经由通信设备44对其他移动体10b~10d输出移动体间距离变更信号。接收到该移动体间距离变更信号的其他移动体10b~10d如图5所示那样切换成第2行驶模式,扩大移动体间距离df。其结果,在到达登机口t1时,如图6d所示那样,多个移动体10a~10d能在空出能进行原地转向的移动体间距离df2的状态下、即在确保了转向空间sp的状态下停止。
74.另外,原地转向所需的移动体间距离df2若使用图2来说明,则能用下述的数学式1来表征。
75.【数学式1】
76.df2=2
×
rp-lt
ꢀꢀꢀ
(数学式1)
77.若多个移动体10a~10d在登机口t1停止,则在搭乘有乘客的情况下,该乘客从移动体下车。
78.在登机口t1以空的状态停止中的多个移动体10a~10d各自如图6e所示那样执行180度的原地转向。由此,队列掉头。
79.例如,机场工作人员对队列排头的移动体10a执行使队列掉头的指示输入。掉头指示输入经由移动体10a的操作部22或经由机场工作人员所携带的通信终端来进行。
80.接受到掉头指示输入的队列排头的移动体10a的控制装置30使移动体10a执行180度的原地转向,并经由通信设备44将转向信号发送到其他移动体10b~10d。接收到转向信号的其他移动体10b~10d各自执行180度的原地转向。作为替代方案,也可以是在停止场所(登机口t1)停止并经过给定的时间后,多个移动体10a~10d各自自动执行180度的原地转向。
81.另外,也可以是在移动体10a~10d分别执行180度的原地转向前,移动体10a~10d各自的控制装置30基于测距传感器18的检测结果来判断是否能进行原地转向。即,由测距传感器18取得周围环境的信息,确认妨碍原地转向的障碍物的存在。例如,在预先决定了执行180度的原地转向时的转向方向的情况下(例如在预先决定为顶视观察下顺时针进行转向的情况下),移动体10a~10d各自的控制装置30基于测距传感器18的检测结果来判断是否能进行该转向方向的原地转向。在不能进行该转向方向的原地转向的情况下,判断是否能进行相反方向的原地转向。无论向哪个方向都不能进行原地转向的移动体的控制装置经由操作部22对机场工作人员通知不能进行原地转向的意思。接受到该通知的机场工作人员
整顿该移动体周围的环境(例如清除障碍物),以便能进行原地转向。
82.执行了180度的原地转向的多个移动体10a~10d各自基于测距传感器18的检测结果来确认前方的移动体(即反射构件20)的存在。通过180度的原地转向而新成为队列的排头的移动体10d由于在前方不能确认到移动体的存在,因此将自身识别为新的队列的排头。
83.识别为新的队列的排头的移动体10d的控制装置30对到此为止是队列的排头的移动体10a发送排头宣布信号。这时,移动体10a在从多个移动体接收到排头宣布信号的情况下,另外,在执行180度的原地转向并经过给定的时间(例如60秒)也不能接收到排头宣布信号的情况下,对机场工作人员通知发生了排头识别错误。接受到通知的机场工作人员经由作为新的队列的排头的移动体10d的操作部22或经由所携带的通信终端,将移动体10d手动设定为新的队列的排头。
84.从移动体10d接收到排头宣布信号的移动体10a将构成队列的其他移动体10b~10d的信息发送到该移动体10d。与此同时,移动体10a对移动体10b~10c通知移动体10d是新的队列的排头这一情况。之后,移动体10b~10d暂时阻断与移动体10a的通信。之后不久,移动体10a~10c对作为新的队列的排头的移动体10d连接通信。由此,作为新的队列的排头的移动体10d识别到在该队列中存在移动体10a~10c。
85.若编组了新的队列,则如图6f所示那样,多个移动体10a~10d就从登机口t1向容纳场所t0在第1行驶模式下移动。即,移动体10d通过手动行驶或自主行驶向容纳场所t0行驶,其他移动体10a~10c对该移动体10d进行追随行驶。
86.根据以上那样的本实施方式,能使多个移动体各自从死路等不能进行u形转向的场所在维持队列的关系的状态下不后退地移动。
87.以上举出上述的实施方式说明了本公开,但本公开的实施方式并不限定于此。
88.例如在上述的实施方式的情况下,将使多个移动体在停止场所以空出能进行180度的原地转向的给定的移动体间距离的状态下停止的单元作为控制装置而搭载于各个移动体。但本公开的实施方式并不限于此。例如,也可以由位于移动体的外部的控制装置(例如利用者所携带的通信终端)来控制多个移动体的行驶。在该情况下,基于从控制装置发送的信号来执行各个移动体的行驶(行驶速度以及行驶方向)、移动体间距离的变更。在该情况下,移动体各自不进行追随前方的移动体的自主行驶而执行队列行驶。
89.另外,在上述的实施方式的情况下,移动体是能搭乘利用者的移动体。但本公开的实施方式并不限于此。例如移动体也可以是运送物品的无人运送机器人。在移动体是无人运送机器人的情况下,由于从不能进行u形转向的停止场所移动时不后退,因此不再需要在该无人运送机器人搭载确认后方的传感器、摄像机。
90.进而,在上述的实施方式的情况下,在多个移动体的队列停止在不能进行u形转向的停止场所时,多个移动体10a~10d各自在空出能进行180度的原地转向的给定的移动体间距离df2的状态下停止。但本公开的实施方式并不限于此。例如也可以是在队列停止在不能进行u形转向的停止场所时,多个移动体以能进行180度的原地转向的方式停止。在该情况下,在利用者设定队列的停止场所时,还设定在该停止场所执行180度的原地转向。
91.即,本公开的实施方式广义上是使多个移动体进行队列行驶的队列行驶系统,具有:能进行原地转向的多个移动体;和控制多个移动体的行驶的控制装置,所述控制装置在使所述多个移动体的队列停止时,在所述多个移动体各自空出能进行180度的原地转向的
给定的移动体间距离的状态下,使所述移动体分别停止。
92.根据本公开,能使多个移动体各自从死路等不能进行u形转向的场所在维持队列的关系的状态下不后退地移动。
93.如以上那样,作为本公开中的技术的例示,说明了多个实施方式。为此,提供了附图以及详细的说明。
94.因此,在附图以及详细的说明所记载的构成要素中,不仅包含为了解决课题所必须的构成要素,还能为了例示所述技术而包含对于解决课题来说并非必须的构成要素。因此,不应当因为这些并非必须的构成要素记载于附图、详细的说明中,就直接认定这些并非必须的构成要素是必须的。
95.另外,上述的实施方式用于例示本公开中的技术,因此能在权利要求书或其等同的范围内进行各种变更、置换、附加、省略等。
96.工业可利用性
97.本公开能适用于多个移动体进行队列行驶的队列行驶系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。