1.本实用新型涉及自动化生产加工领域,尤其涉及一种高效取放料的注塑机械手。
背景技术:
2.注塑机械手,用于在注塑生产后,从模具中取出成形的产品及流道废料。因为原本通过人工取料的方式效率太低,而且带有一定的危险性,因此很多加工厂商开始采用注塑机械手进行注塑成品的取料。然而,现有的注塑机械手中,成品取料机构以及废料取料机构设置于同一移动机构上,在完成取料之后,需要依次进行成品及废料的放料,效率较低,不能满足大批量生产活动的需求。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本实用新型的目的是克服现有技术的不足,提供一种高效取放料的注塑机械手。
5.本实用新型的技术方案如下:提供一种高效取放料的注塑机械手,包括:机械手主体、设置于所述机械手主体上的悬臂、设置于所述悬臂上的旋转固定座、设置于所述旋转固定座上的两个移动机构、分别设置于所述移动机构的移动平台上的升降机构、设置于一侧所述升降机构的移动平台上的成品取料机构、以及设置于另一侧所述升降机构的移动平台上的废料取料机构,所述移动机构驱动升降机构进行左右往复运动,所述升降机构驱动成品取料机构或废料取料机构进行上下往复运动。
6.进一步地,所述旋转固定座上设置有调整机构,所述调整机构包括:动力模块、与所述动力模块连接的双向丝杆、以及分别套设于所述双向丝杆两端的丝杆滑块,两个所述移动机构分别与双向丝杆两端的丝杆滑块连接。
7.进一步地,所述旋转固定座上设置有若干导杆,所述导杆与双向丝杆相互平行,所述导杆穿过移动机构。
8.进一步地,所述移动机构上设置有视觉检测装置。
9.进一步地,所述成品取料机构包括:设置于所述升降机构的移动平台上的翻转机构、以及设置于所述翻转机构上的若干吸盘。
10.进一步地,所述吸盘采用无痕吸盘。
11.进一步地,所述废料取料机构采用气动夹爪。
12.采用上述方案,本实用新型通过两个移动模块分别实现成品取料机构以及废料取料机构的移动,从而在完成取料之后,可以同时进行成形产品的下料以及流道废料的回收投料,从而减少注塑机械手的移动次数,以此提高整体工作效率,适应大批量生产活动的需求。
附图说明
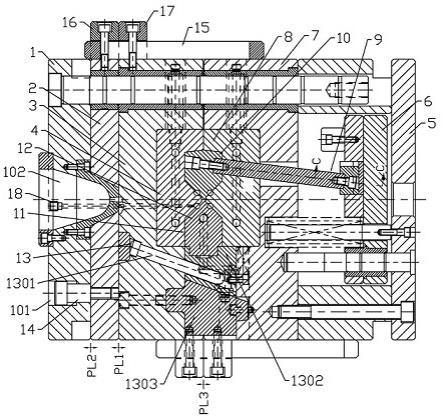
13.图1为本实用新型的结构示意图。
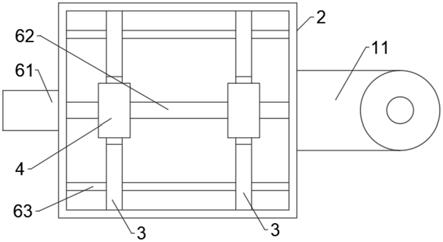
14.图2为本实用新型的俯视图。
具体实施方式
15.以下结合附图和具体实施例,对本实用新型进行详细说明。
16.请参阅图1、图2,本实用新型提供一种高效取放料的注塑机械手,包括:机械手主体1、设置于所述机械手主体1上的悬臂11、设置于所述悬臂11上的旋转固定座2、设置于所述旋转固定座2上的两个移动机构3、分别设置于所述移动机构3的移动平台上的升降机构4、设置于一侧所述升降机构4的移动平台上的成品取料机构51、以及设置于另一侧所述升降机构4的移动平台上的废料取料机构52。所述移动机构3驱动升降机构4进行左右往复运动。所述升降机构4驱动成品取料机构51或废料取料机构52 进行上下往复运动。
17.注塑机完成产品的注塑成型后,打开模具,使得产品与流道分离并分别位于产品的上模与下模上,并分别将产品及流道推出。注塑机械手启动,通过悬臂11将旋转固定座2移动至注塑机上方,然后两个升降机构4分别驱动成品取料机构51以及废料取料机构52向下移动,从而分别拾取成形产品以流道废料。然后升降机构4复位,分别驱动成品取料机构51以及废料取料机构52上移。悬臂将旋转固定座2移动至后端出料工位处,与成品取料机构51对应的移动机构3将成品取料机构51移动至下料带上方,便于成品取料机构51将成形产品放置于下料带上,以将成形产品进行出料。与废料取料机构52对应的移动机构3将废料取料机构53移动至流道回收机构上方,并释放流道废料,将流道废料投入流道回收机构中,以对流道废料进行回收利用。
18.所述旋转固定座2上设置有调整机构6。所述调整机构6包括:动力模块61、与所述动力模块61连接的双向丝杆62、以及分别套设于所述双向丝杆62两端的丝杆滑块。两个所述移动机构3分别与双向丝杆62两端的丝杆滑块连接。通过调整机构6可调节成品取料机构51以及废料取料机构 52之间的距离。启动调整机构,根据注塑机的空间以及模具开模后上模与下模之间的距离,调整成品取料机构51以及废料取料机构52之间的距离,以满足成形产品以及流道废料的取料需求。
19.所述旋转固定座2上设置有若干导杆63。所述导杆63与双向丝杆62 相互平行。所述导杆63穿过移动机构3。通过导杆63为移动机构3提供平衡支撑及导向,满足移动机构3沿双向丝杆62进行往复移动的需求。
20.所述移动机构3上设置有视觉检测装置,以便于确认下料带及流道回收机构的位置,便于成品取料机构51以及废料取料机构52分别进行成品放置或废料投料。
21.所述成品取料机构51包括:设置于所述升降机构4的移动平台3上的翻转机构、以及设置于所述翻转机构上的若干吸盘。因为在注塑机中,模具的上模与下模为横向进行开模。在取料时,通过翻转机构进行翻转,以便于吸盘拾取模具中的成形产品,并在移动到下料带上方后,再次通过翻转机构进行翻转,以便于将成形产品放置于下料带上,便于产品的拾取及放置的需求。
22.所述吸盘采用无痕吸盘,以避免在进行成形产品取料的过程中损伤产品表面。
23.所述废料取料机构52采用气动夹爪,以便于夹持流道废料,并将流道废料从模具中拉出。
24.综上所述,本实用新型通过两个移动模块分别实现成品取料机构以及废料取料机
构的移动,从而在完成取料之后,可以同时进行成形产品的下料以及流道废料的回收投料,从而减少注塑机械手的移动次数,以此提高整体工作效率,适应大批量生产活动的需求。
25.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种高效取放料的注塑机械手,其特征在于,包括:机械手主体(1)、设置于所述机械手主体(1)上的悬臂(11)、设置于所述悬臂(11)上的旋转固定座(2)、设置于所述旋转固定座(2)上的两个移动机构(3)、分别设置于所述移动机构(3)的移动平台上的升降机构(4)、设置于一侧所述升降机构(4)的移动平台上的成品取料机构(51)、以及设置于另一侧所述升降机构(4)的移动平台上的废料取料机构(52),所述移动机构(3)驱动升降机构(4)进行左右往复运动,所述升降机构(4)驱动成品取料机构(51)或废料取料机构(52)进行上下往复运动。2.根据权利要求1所述的高效取放料的注塑机械手,其特征在于,所述旋转固定座(2)上设置有调整机构(6),所述调整机构(6)包括:动力模块(61)、与所述动力模块(61)连接的双向丝杆(62)、以及分别套设于所述双向丝杆(62)两端的丝杆滑块,两个所述移动机构(3)分别与双向丝杆(62)两端的丝杆滑块连接。3.根据权利要求2所述的高效取放料的注塑机械手,其特征在于,所述旋转固定座(2)上设置有若干导杆(63),所述导杆(63)与双向丝杆(62)相互平行,所述导杆(63)穿过移动机构(3)。4.根据权利要求1所述的高效取放料的注塑机械手,其特征在于,所述移动机构(3)上设置有视觉检测装置。5.根据权利要求1所述的高效取放料的注塑机械手,其特征在于,所述成品取料机构(51)包括:设置于所述升降机构(4)的移动平台上的翻转机构、以及设置于所述翻转机构上的若干吸盘。6.根据权利要求5所述的高效取放料的注塑机械手,其特征在于,所述吸盘采用无痕吸盘。7.根据权利要求1所述的高效取放料的注塑机械手,其特征在于,所述废料取料机构(52)采用气动夹爪。
技术总结
本实用新型公开一种高效取放料的注塑机械手,包括:机械手主体、设置于机械手主体上的悬臂、设置于悬臂上的旋转固定座、设置于旋转固定座上的两个移动机构、分别设置于移动机构的移动平台上的升降机构、设置于一侧升降机构的移动平台上的成品取料机构、以及设置于另一侧升降机构的移动平台上的废料取料机构,移动机构驱动升降机构进行左右往复运动,升降机构驱动成品取料机构或废料取料机构进行上下往复运动。本实用新型通过两个移动模块分别实现成品取料机构以及废料取料机构的移动,从而在完成取料之后,可以同时进行成形产品的下料以及流道废料的回收投料,从而减少注塑机械手的移动次数,以此提高整体工作效率,适应大批量生产活动的需求。生产活动的需求。生产活动的需求。
技术研发人员:汤绍成
受保护的技术使用者:深圳市博洋精密科技有限公司
技术研发日:2021.09.15
技术公布日:2022/2/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。