1.本实用新型属于机械臂技术领域,具体地说,涉及一种便于快速组装的机器人机械臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
3.现有的机械臂的抓钩部件损坏时需要更换整个抓钩总成,而无法更换损坏的某一个,且抓钩由于间隙较小,导致润滑油不易进入转动面。
技术实现要素:
4.针对现有的机械臂的抓钩部件损坏时需要更换整个抓钩总成,而无法更换损坏的某一个,且抓钩由于间隙较小,导致润滑油不易进入转动面的问题,本实用新型提供一种便于快速组装的机器人机械臂,该机械臂包括机器人机械臂,所述的机器人机械臂包括机械臂总成和抓钩总成,该组件配合使用可以有效解决现有的机械臂的抓钩部件损坏时需要更换整个抓钩总成,而无法更换损坏的某一个,且抓钩由于间隙较小,导致润滑油不易进入转动面的问题。
5.为解决上述问题,本实用新型采用如下的技术方案。
6.一种便于快速组装的机器人机械臂,包括机器人机械臂,所述的机器人机械臂包括机械臂总成和抓钩总成,所述的抓钩总成装配在机械臂总成的末端,所述的抓钩总成包括连接总成、底壳总成和钩头总成,所述的底壳总成装配在连接总成的一端,钩头总成装配在底壳总成的上端面,通过底壳总成配合气缸使得钩头总成收缩抓起工件。
7.优选地,所述的连接总成包括套筒,所述的套筒一端装配有第一螺纹头,另一端设置有内螺纹,通过内螺纹用于连接底壳总成。
8.优选地,所述的底壳总成包括圆壳,所述的圆壳的下端装配有第二螺纹头,圆壳的上端面装配有六角头,且圆壳内部中空,圆壳靠近上端面的外壁上设置有多个装配槽,装配槽的内侧装配有棉板,且装配槽的内壁装配有转轴,转轴的外壁设置有插孔,插孔的内壁上设置有对称的锁孔,靠近转轴外侧的装配槽的两侧壁上设置有对称的半弧槽;通过六角头拧下能够向圆壳的内部加入润滑油。
9.优选地,所述的钩头总成包括钩体,所述的钩体的两侧壁上装配有对称的按钮,钩体靠近底部的两侧装配有半弧块,钩体的底部装配有插柱,插柱的外壁上装配有对称的锁柱,且半弧块和锁柱与按钮弹性连接。
10.优选地,所述的棉板与圆壳的内壁贯通。
11.优选地,所述的机械臂总成包括安装底座,所述的安装底座上端面装配有安装柱,
安装柱的上端装配有第一转轴,第一转轴的外壁上装配有轴杆,轴杆上装配有安装杆,安装杆的末端装配有气缸,气缸的末端设置有螺纹孔,通过气缸的工作使得抓钩总成的收紧与放松。
12.有益效果
13.相比于现有技术,本实用新型的有益效果为:
14.(1)本实用新型中,通过按压按钮能够使得半弧块和锁柱向内收缩,在插入插孔后松开按钮使得半弧块插入半弧槽,锁柱插入锁孔,从而能够锁紧,在需要拆卸时只需要按压按钮,使得半弧块和锁柱向内收缩,此时向外抽出即可单独拆卸需要更换的钩体,使得不需要每次更换都需要完全的拆下钩头总成,使得安装和拆卸极为方便,维修也更加方便。
15.(2)本实用新型中,通过拧下六角头,向圆壳的内部加入润滑油,通过棉板能够将内部的润滑油吸附,通过棉板外壁与转轴紧贴,使得转轴在转动时润滑油自动抹在转轴的外壁,能够更加方便的向转轴处加入润滑油,且也能避免润滑油的浪费。
附图说明
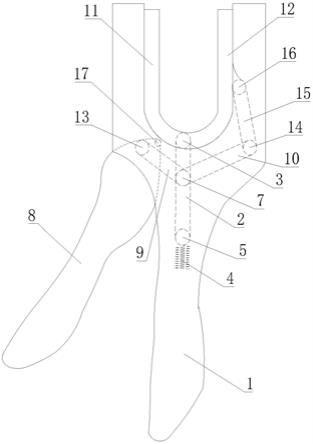
16.图1为本实用新型中一种便于快速组装的机器人机械臂结构示意图;
17.图2为本实用新型中机械臂总成结构示意图;
18.图3为本实用新型中抓钩总成结构示意图;
19.图4为本实用新型中连接总成结构示意图;
20.图5为本实用新型中底壳总成结构示意图;
21.图6为本实用新型中a处放大结构示意图;
22.图7为本实用新型中钩头总成结构示意图;
23.图8为本实用新型中b处放大结构示意图。
24.图中各附图标注与部件名称之间的对应关系如下:
25.1、机器人机械臂;
26.2、机械臂总成;21、安装底座;22、安装柱;23、第一转轴;24、轴杆;25、安装杆;26、气缸;27、螺纹孔;
27.3、抓钩总成;31、连接总成;311、套筒;312、第一螺纹头;313、内螺纹;
28.32、底壳总成;321、圆壳;322、第二螺纹头;323、六角头;324、装配槽;325、棉板;326、转轴;327、插孔;328、锁孔;329、半弧槽;33、钩头总成;331、钩体;332、按钮;333、半弧块;334、插柱;335、锁柱。
具体实施方式
29.下面结合具体实用新型对本实用新型进一步进行描述。
30.实施例1
31.如图1所示,其为本实用新型一优选实施方式的一种便于快速组装的机器人机械臂结构示意图,本实施例的一种便于快速组装的机器人机械臂,包括机器人机械臂1,所述的机器人机械臂1包括机械臂总成2和抓钩总成3,所述的抓钩总成3装配在机械臂总成2的末端。
32.如图2所示,其为本实用新型中机械臂总成结构示意图,所述的机械臂总成2包括
安装底座21,所述的安装底座21上端面装配有安装柱22,安装柱22的上端装配有第一转轴23,第一转轴23的外壁上装配有轴杆24,轴杆24上装配有安装杆25,安装杆25的末端装配有气缸26,气缸26的末端设置有螺纹孔27;通过螺纹孔27用于装配抓钩总成3,通过第一转轴23调整轴杆24的转动。
33.如图3所示,其为本实用新型中抓钩总成结构示意图,所述的抓钩总成3包括连接总成31、底壳总成32和钩头总成33,所述的底壳总成32装配在连接总成31的一端,钩头总成33装配在底壳总成32的上端面;通过连接总成31与螺纹孔27连接。
34.如图4所示,其为本实用新型中连接总成结构示意图,所述的连接总成31包括套筒311,所述的套筒311一端装配有第一螺纹头312,另一端设置有内螺纹313;通过第一螺纹头312与螺纹孔27螺纹连接。
35.如图5-6所示,其为本实用新型中底壳总成结构示意图,所述的底壳总成32包括圆壳321,所述的圆壳321的下端装配有第二螺纹头322,圆壳321的上端面装配有六角头323,且圆壳321内部中空,圆壳321靠近上端面的外壁上设置有多个装配槽324,装配槽324的内侧装配有棉板325,且装配槽324的内壁装配有转轴326,转轴326的外壁设置有插孔327,插孔327的内壁上设置有对称的锁孔328,靠近转轴326外侧的装配槽324的两侧壁上设置有对称的半弧槽329,通过棉板325将内部的润滑油吸入并摩擦转轴326,从而能够使得转轴326上有源源不断的润滑油,使其实用寿命变长,通过插孔327用于插入钩头总成33并锁紧,使其可以自由的拆卸。
36.如图7所示,其为本实用新型中钩头总成结构示意图,所述的钩头总成33包括钩体331,所述的钩体331的两侧壁上装配有对称的按钮332,钩体331靠近底部的两侧装配有半弧块333,钩体331的底部装配有插柱334,插柱334的外壁上装配有对称的锁柱335,且半弧块333和锁柱335与按钮332弹性连接;通过按压按钮332能够使得半弧块333和锁柱335向内收缩,在插入插孔327后松开按钮332使得半弧块333插入半弧槽329,锁柱335插入锁孔328,从而能够锁紧,自由的拆卸。
37.所述的棉板325与圆壳321的内壁贯通。
38.工作原理:通过按压按钮332能够使得半弧块333和锁柱335向内收缩,在插入插孔327后松开按钮332使得半弧块333插入半弧槽329,锁柱335插入锁孔328,从而能够锁紧,在需要拆卸时只需要按压按钮332,使得半弧块333和锁柱335向内收缩,此时向外抽出即可单独拆卸需要更换的钩体331,使得不需要每次更换都需要完全的拆下钩头总成33,使得安装和拆卸极为方便,维修也更加方便。
39.实施例2
40.如图1-8所示,其为本实用新型另一优选实施方式的一种便于快速组装的机器人机械臂结构示意图,本实施例的一种便于快速组装的机器人机械臂,在实施例1的基础上,通过拧下六角头323,向圆壳321的内部加入润滑油,通过棉板325能够将内部的润滑油吸附,通过棉板325外壁与转轴326紧贴,使得转轴326在转动时润滑油自动抹在转轴326的外壁,能够更加方便的向转轴326处加入润滑油,且也能避免润滑油的浪费。
41.以上内容是结合具体实施方式对本实用新型作进一步详细说明,不能认定本实用新型具体实施只局限于这些说明,对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型的构思的前提下,还可以做出若干简单的推演或替换,都应当视为属于
本实用新型所提交的权利要求书确定的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。