1.本技术涉及机器人技术领域,尤其涉及一种对弈机器人。
背景技术:
2.下棋是一种具有对抗性、竞技性和娱乐性的体育活动,可以锻炼人的思维能力。现如今,网络的兴起,使得下棋的常见形式为用户坐在电子屏幕前进行操作。但是,这样的方式少了面对面的交流,减少了实物的乐趣,且长时间会对眼睛造成伤害。随着人工智能的发展,出现了对弈机器人,即能下棋的机器人。至于下棋,不仅仅局限于一种棋,比如五子棋,围棋,象棋,等等。
3.相关技术中有许多种的对弈机器人,但通常只能满足下棋这一项功能,随着人工智能的发展,对弈机器人下棋的操作指令变得越来越简单。在长时间下棋的过程中,乐趣会越来越少,出现了厌烦感。
4.目前,人们对于对弈机器人的功能已经不仅仅满足于下棋对弈这一项,如何在保证对弈机器人进行下棋对弈的同时还能进行其他的功能扩展,增加趣味性,是目前急需要解决的问题。
技术实现要素:
5.本技术实施例提供一种对弈机器人,以解决对弈机器人进行下棋对弈的同时还能进行其他的功能扩展,增加趣味性的问题。
6.为了达到上述目的,本技术实施例的技术方案是这样实现的:
7.一种对弈机器人,包括:取子装置,用于抓取或释放棋子;功能扩展装置,用于做出与对向目标交互的操作;第一机械臂装置,第一机械臂装置与取子装置连接,用于带动取子装置移动至目标位置;第二机械臂装置,第二机械臂装置与功能扩展装置连接,用于带动功能扩展装置移动至目标位置;处理模块,处理模块与取子装置、功能扩展装置、第一机械臂装置和第二机械臂装置均电连接,处理模块用于控制取子装置、功能扩展装置、第一机械臂装置和第二机械臂装置的动作。
8.进一步地,对弈机器人还包括视觉模组,视觉模组用于获取的棋盘信息和对向目标物信息,处理模块与视觉模组电连接,处理模块还用于根据视觉模组获取的棋盘信息和对向目标物信息,控制取子装置、功能扩展装置、第一机械臂装置和第二机械臂装置的动作。
9.进一步地,处理模块包括电路板和集成在电路板上的处理单元和驱动单元,处理单元用于根据视觉模组获取的棋盘信息和对向目标物信息,做出控制指令;驱动单元用于根据控制指令控制对应目标做出对应动作。
10.进一步地,功能扩展装置包括第一基座、画笔和第一驱动组件,第一驱动组件用于驱动画笔相对于第一基座滑动,使画笔的端部运动至待画画位置。
11.进一步地,第一基座上沿画笔运动的方向设有第一限位槽,画笔具有第一径向凸
起,第一径向凸起配合伸入第一限位槽内,且可沿第一限位槽滑动。
12.进一步地,第一限位槽沿竖直方向设置,且第一限位槽的下端封闭,上端为开口。
13.进一步地,第一驱动组件包括第一驱动电机和第一旋转盖,第一旋转盖的一端与第一驱动电机传动连接,第一旋转盖上设有第一滑槽,第一滑槽与第一限位槽形成夹角,第一径向凸起配合伸入第一滑槽内,第一驱动电机用于驱动第一旋转盖旋转,且第一旋转盖的旋转轴与第一径向凸起平行。
14.进一步地,第一径向凸起为两个,两个第一径向凸起分别位于画笔的两侧,且轴线重合,第一限位槽和第一滑槽均对应两个第一径向凸起为两个。
15.进一步地,第一基座包括固定为一体的第一连接部、第一驱动安装部和画笔壳体部,第一连接部用于与第一机械臂连接,第一驱动安装部用于安装第一驱动组件,画笔安装在画笔壳体部内,且与画笔壳体部可滑动连接。
16.进一步地,画笔至少有部分的外轮廓与画笔壳体部的内轮廓相匹配,以使画笔沿画笔壳体部的内壁滑动。
17.进一步地,画笔和画笔壳体部之间具有间隙,间隙内设有缓冲垫。
18.进一步地,画笔的径向设有多个固定柱,缓冲垫套设在固定柱上。
19.进一步地,取子装置包括第二基座、取子件和第二驱动组件,第二驱动组件用于驱动取子件相对于第二基座滑动,使取子件的取子部至棋子位置。
20.进一步地,第二基座上沿取子件运动的方向设有第二限位槽,取子件具有第二径向凸起,第二径向凸起配合伸入第二限位槽内,且可沿第二限位槽滑动。
21.进一步地,第二限位槽沿竖直方向设置,且第二限位槽的下端封闭,上端为开口。
22.进一步地,第二驱动组件包括第二驱动电机和第二旋转盖,第二旋转盖的一端与第二驱动电机传动连接,第二旋转盖上设有第二滑槽,第二滑槽与第二限位槽形成夹角,第二径向凸起配合伸入第二滑槽内,第二驱动电机用于驱动第二旋转盖旋转,且第二旋转盖的旋转轴与第二径向凸起平行。
23.进一步地,第二径向凸起为两个,两个第二径向凸起分别位于取子件的两侧,且轴线重合,第二限位槽和第二滑槽均对应两个第二径向凸起为两个。
24.进一步地,第二基座包括固定为一体的第二连接部、第二驱动安装部和取子件壳体部,第二连接部用于与第二机械臂连接,第二驱动安装部用于安装第二驱动组件,取子件安装在取子件壳体部内,且与取子件壳体部可滑动连接。
25.进一步地,取子件壳体部内轮廓有凹部,取子件外轮廓有凸部,凹部与凸部相匹配,以使取子件沿取子件的内壁滑动。
26.进一步地,视觉模组包括无线通信模块和数据接口。
27.进一步地,视觉模组包括摄像头和识别单元,摄像头用于拍摄棋盘信息和对向目标物信息,识别单元用于对摄像头拍摄的棋盘信息和对向目标物的信息进行计算和识别。
28.进一步地,摄像头的镜片所在平面与棋盘表面呈锐角角度。
29.进一步地,摄像头为两个。
30.本技术提供的一种对弈机器人,在第一机械臂和第二机械臂上分别设置了取子装置和功能扩展装置,其中,第一机械臂和取子装置可以进行挪动棋子的操作,以实现和用户下棋;而第二机械臂和功能扩展装置可以进行挪动棋子以外的动作,以增加趣味性,更好的
与人交互,示例的,功能扩展装置可以进行画画、打手语、甚至端茶倒水等操作。因此,本技术提供的对弈机器人,相比相关技术的机器人,通过第二机械臂和功能扩展装置的设置,可以实现很多扩展功能,解决了如何在保证对弈机器人进行下棋对弈的同时还能进行其他的功能扩展的问题,为用户在使用对弈机器人在下棋的过程中,增加更多的趣味性。
附图说明
31.图1为一种对弈机器人的机械臂收起状态图;
32.图2为一种对弈机器人的机械臂展开状态图;
33.图3为一种对弈机器人的立体图;
34.图4为一种对弈机器人功能扩展装置的爆炸图;
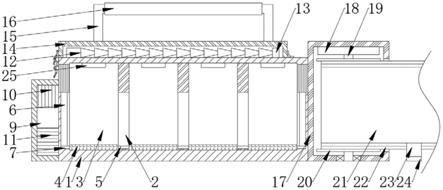
35.图5为一种对弈机器人功能扩展装置的剖视图;
36.图6为一种对弈机器人取子装置的爆炸图;
37.图7为一种对弈机器人取子装置的剖视图;
38.图8为一种对弈机器人取子装置的立体图。
39.附图标记说明:1-功能扩展装置;11-第一基座;111-第一连接部;112-第一驱动安装部;113-画笔壳体部;1131-第一限位槽;12-画笔;121-第一径向凸起;122-固定柱;13-第一驱动组件;131-第一驱动电机;132-第一旋转盖;1321-第一滑槽;2-取子装置;21-第二基座;211-第二连接部;212-第二驱动安装部;213-取子件壳体部;2311-第二限位槽;2312-凹部;22-取子件;221-第二径向凸起;222-凸部;23-第二驱动组件;231-第二驱动电机;232-第二旋转盖;2321-第二滑槽;3-第一机械臂;4-第二机械臂;5-处理模块;6-视觉模组;61-摄像头;7-缓冲垫;8-棋子,9-棋盘。
具体实施方式
40.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的技术特征可以相互组合,具体实施方式中的详细描述应理解为本技术宗旨的解释说明,不应视为对本技术的不当限制。
41.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术的具体技术方案做进一步详细描述。以下实施例用于说明本技术,但不用来限制本技术的范围。
42.在本技术实施例中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术实施例的描述中,除非另有说明,“多个”的含义是两个或两个以上。
43.此外,在本技术实施例中,“上”、“下”、“左”以及“右”等方位术语是相对于附图中的部件示意置放的方位来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,其可以根据附图中部件所放置的方位的变化而相应地发生变化。
44.在本技术实施例中,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连。
45.在本技术实施例中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
46.在本技术实施例中,“示例性的”或者“例如”等词用于表示作例子、例证或说明。本技术实施例中被描述为“示例性的”或者“例如”的任何实施例或设计方案不应被解释为比其他实施例或设计方案更优选或更具优势。确切而言,使用“示例性的”或者“例如”等词旨在以具体方式呈现相关概念。
47.本技术实施例提供一种对弈机器人,对弈机器人通过人工智能系统实现与用户的对弈。其中,对弈可以是任何可能的形式,例如:中国象棋、国际象棋、围棋、军棋、跳棋、五子棋等。还可以是民间杂棋的种类,如潮州地区的旋回棋、策反棋、赶虎棋等。
48.相关技术中有许多种的对弈机器人,但通常只能满足下棋这一项功能,随着人工智能的发展,对弈机器人下棋的操作指令变得越来越简单。在长时间下棋的过程中,乐趣会越来越少,出现了厌烦感。
49.为了实现用户在使用对弈机器人下棋的同时与对象目标物进行交互的目的,本技术提出了一种对弈机器人,如图1所示,该对弈机器人至少包括一个取子装置2,功能扩展装置1、第一机械臂3装置、第二机械臂4装置和处理模块5,其中,取子装置2,用于抓取或释放棋子8;功能扩展装置1,用于做出与对向目标交互的操作;第一机械臂3装置,第一机械臂3装置与取子装置2连接,用于带动取子装置2移动至目标位置;第二机械臂4装置,第二机械臂4装置与功能扩展装置1连接,用于带动功能扩展装置1移动至目标位置;处理模块5与取子装置2、功能扩展装置1、第一机械臂3装置和第二机械臂4装置均电连接,处理模块5用于控制取子装置2、功能扩展装置1、第一机械臂3装置和第二机械臂4装置的动作。
50.需要具体说明的是,处理模块5可以是芯片、控制器等,一般情况下会设置电路板上。处理模块5同取子装置2、功能扩展装置1、第一机械臂3和第二机械臂4通过电连接的方式,发出控制第一机械臂3和第二机械臂4的指令和动作,使取子装置2和功能扩展装置1移动到指定的位置,紧接着处理模块5通过向取子装置2和功能扩展装置1发出指令,使取子装置2和功能扩展装置1完成自身相应的功能。
51.进一步地,功能扩展装置1的设计是为了在下棋的过程中可以与对象目标物实现交互,例如,与用户进行握手、打招呼等,方式不限,目的是为了在与对向目标物进行对弈的过程中,增加趣味性。
52.需要具体说明的是,对弈机器人的对向目标物位于对弈机器人对面且需要与对弈机器人交互的物体,该物体可以是用户、玩偶甚至另外一个对弈机器人,本发明对此不做限定。为了方便理解,下面对对弈机器人的对向目标物为真实的人(即用户)为例,进行本技术实施例的详细说明。
53.另外,在一些实施例中,棋盘9和对弈机器人是固定在一起的,即对弈机器人还包括棋盘9,棋盘9和机器人固定在一起可以更好确定第一机械臂3和第二机械臂4的位置进行处理和计算。
54.更进一步地,第一机械臂3和第二机械臂4的结构可相同可不同,两者的摆放位置
可位于异侧也可位于同侧,机器人的机械臂数量不限。本技术对于此不进行限制。
55.示例地,如图2所示,第一机械臂3和第二机械臂4在对弈机器人进行对弈或者与用户进行交互时,第一机械臂3和第二机械臂的传动范围应该覆盖整个目标棋盘9,在对弈过程中应满足棋子8可以落到棋盘9上的每一个角落,避免由于棋子8落不到云端所指定的地方,造成输掉对弈棋局,降低用户的体验感。
56.示例的,如图3所示,在使用对弈机器人进行下棋的过程中,存在棋盘9上的棋子8可能与目标位置存在位置偏差,为了解决这个问题,该对弈机器人装置还添加视觉模组6模块,通过视觉模组6获取到棋盘9上棋子8的信息,然后反馈到处理模块5,进而发出第一机械臂3和第二机械臂4的运动的指令,使棋盘9上的棋子8到达目标位置。添加视觉模组6可以更加精确的定位和纠错,定位下棋的位置,提高取子装置2的精确度。
57.在一些实施例中,视觉模组6中可以包括摄像头61和识别单元,其中,摄像头61用于拍摄棋盘的信息和对向目标物的信息,识别单元用于对摄像头拍摄的棋盘信息和对向目标物的信息进行计算和识别。
58.如果视觉模组6中只包括摄像头61,那么摄像头61所拍摄的棋盘信息和对向目标物信息只能通过处理模块5处理,对处理模块5的处理功能要求较高,运行速度较慢,影响用户体验。假如在视觉模组6中同时加上摄像头61和识别单元,摄像头61拍摄棋盘的信息和对向目标物信息通过识别单元进行计算和识别,形成处理模块5可以识别的语言,处理模块5只需要识别语言控制第一机械臂3和第二机械臂4完成对应的动作,减轻了处理模块5的任务,从摄像头61拍摄的棋盘信息和对向目标物信息到根据完成拍摄的棋盘信息和对向目标物信息所做出的动作需要的时间大大减少,用户体感会更好。
59.识别单元可以对摄像头拍摄的各种信息进行识别,示例地,可以进行活体识别且双目活体准确率高达99.99%。视觉模组中存在大量的本地人脸库,在没有无线通信的情况下可以在本地实现离线识别人脸,提取人脸特征。同时在识别单元内设置了系统级芯片(system on a chip,soc),独立进行识别,直接在上位机输出了比对结果,完成了本地识别。最后还有极速识别,最快可达到0.3秒无感人脸识别体验。对于用户的假发、眼镜、帽子、设置用户是否进行化妆都可以进行准确识别。
60.除了在识别单元上设置各种识别算法外,还可以在芯片上设置手眼协调坐标与云端进行对接的算法,将摄像头61拍摄的棋盘信息反馈云端,根据云端所发出的指令,识别单元设置的算法计算第一机械臂3和第二机械臂4与摄像头61的相对坐标,传向处理模块5,处理模块5根据相对坐标控制第一机械臂3和第二机械臂4移动到指定坐标位置,顺利完成抓取或释放棋子的动作。
61.为了使摄像头61在逆光的情况下拍摄的更加清楚,还在识别单元上添加了智能曝光算法,达到了在逆光场景1米的情况下,成像依然很清晰的目的。
62.有益地,在识别单元上集成多种算法,实现了算法与硬件的深度融合且精巧简约,处理功能强大,且后期如对对弈机器人提出更高的要求,只需要在识别单元上继续集成算法,不要要改变对弈机器人的其他部分,方便快捷。
63.在其他的一些实施例中,如图3所示,视觉模组6模块里还包括摄像头61,摄像头61可以拍摄棋盘9上棋子8信息的同时还可以得到用户信息,用户信息指用户所展示出来的信息,包括用户的语言、表情、动作、穿着、外貌等信息,对弈机器人可以根据用户信息更好的
与用户实现交互。
64.具体的,摄像头61采用集成摄像头,采用集成工业级200万像素,物距范围高达0.5-1.5米,摄像头61的数量可以为两个,模拟人的眼睛,在拍摄过程对拍摄的视角更大,拍摄的更加清楚。
65.进一步地,视觉模组6中还可以加入灯板,方便摄像头61在拍摄棋盘信息和对向目标物信息时由于天气或者光线原因拍摄不清晰的情况下进行补光,拍摄出清晰的照片,方便主板或者处理单元更加准确的处理拍摄的棋盘信息和对向目标物的信息。
66.视觉模组包括镜片、灯板、摄像头硅胶套、摄像头、支架、主板等部件,壳体将摄像头、支架、主板以及摄像头硅胶套连接在一起,在前壳的前方内嵌灯板和镜片。为了方便安装和维护,将壳体分为前壳和后壳两部分。需要进一步说明的是,如图3所示,摄像头61的镜片可与棋盘9表面呈锐角角度,将俯视改为侧视,摄像头61相当于人的眼睛,将对弈机器人更好的设置成拟人形态,例如,对弈机器人包括躯干部,躯干部一边设置第一机械臂3,另一边设置第二机械臂4,躯干部上方设置头部,头部上设置摄像头61。
67.具体的,将摄像头61的镜片设置为与棋盘9表面呈锐角角度,是为了同时拍摄用户信息和棋盘9信息,将棋盘9信息和用户信息可以拍到一张图片上,如将摄像头61的镜片设置为与棋盘9表面平行的位置,可以拍摄到用户信息但不能拍摄到棋盘9信息,如果将摄像头61设置为与棋盘9表面垂直的位置,可以拍摄到棋盘9信息但是不能拍摄到用户信息,总而言之,无论将棋盘9与摄像头61平行或者垂直设置,都不能兼顾用户信息和棋盘9信息,因此,将摄像头61的镜片设置为与棋盘9表面呈锐角角度是最优的选择。
68.在此基础上,镜头的视场角的大小决定了镜头的视野范围。在光学仪器中,以光学仪器的镜头为顶点,以被测目标的物像可通过镜头的最大范围的两条边缘构成的夹角,称为视场角。视场角越大,视野就越大,光学倍率就越小。通俗地说,目标物体超过这个角就不会被收在摄像头61里。
69.因此,一方面,本技术实施例的对弈机器人,对摄像头61的镜头的视场角进行了调整,使摄像头61所需要拍摄用户信息和棋盘的信息完全落在视场角内,摄像头61可以完整地拍摄用户信息和棋盘信息,更好地实现与用户的交互。
70.在一些实施例中,对弈机器人的视觉模组6还加入了无线通信模块和数据接口模块,无线通信模块实现与云端进行通讯,通过行动热点(wi-fi)、蓝牙等无线通讯手段连接到公司网络,使对弈机器人成为物联网的一部分,而且在现阶段,无线通讯技术发展也相对成熟,使得无线通讯的综合降低,性能相比有线通讯更加稳定,组网更加的灵活,可扩展性好。
71.同时,在对弈机器人的视觉模组6模块中加入各种数据接口模块,例如:uvc接口(usb video class)、结构化数据接口以及业务控制接口等。其中在视觉模组上设置uvc接口是为了插入结构化数据接口,而结构化数据采用json(java script object notation,js,对象简谱)格式进行封装然后通过mjpeg(motion joint photo graphic experts group)视频流格式插帧到uvc视频流或者通过串口上报到上位机,提供业务控制接口的目的是为了与上位机进行业务交互,支持数据量大的业务交互,例如:升级、添加底库、查询版本号等。在视觉模组6模块添加各种数据接口模块,在信息传输的过程中,不需要将外界信息转换为视觉模组中可以识别的语言,而是接入对应的数据接口模块,更快更准确地完成
信息数据的传输。
72.示例地,处理模块5、视觉模组6、取子装置2、功能扩展装置1、第一机械臂3和第二机械臂4之间采取电连接的方式,进行电连接可以减少电能损耗同时各个模块之间可以更好更快的进行反应,接受指令。
73.在一些其他的实施例中,对弈机器人在下棋的过程中还要完成于用户的交互动作,对弈机器人的处理模块5的功能要求更加严峻,在此基础上,为了解决如何将处理模块5中的功能要求进行扩大化,尽可能处理视觉模组6获取的棋盘9信息和对向目标物信息,得出控制指令,根据控制指令来控制对应目标作出相应的动作,在本技术的对弈机器人的处理模块5中设置了电路板和集成在电路板上的处理单元和驱动单元,具体地,电路板将驱动模块电路、稳压调压模块等功能均集成为一体,实现单板硬件。不但将处理模块5中的功能扩大化而且处理模块5也变得精巧化。
74.需要具体说明的是,功能扩展装置1的设置是为了在下棋的过程中可以与对象目标物实现交互,目的是为了在与对向目标物进行对弈的过程中,增加趣味性。进一步地,如图4所示,功能扩展装置1中设置第一基座11、画笔12和第一驱动组件13,第一驱动组件13驱动画笔12相对于第一基座11,使得画笔12的端部运动至画画位置。对于一些热爱画画的用户,在下棋的同时还可以画画,增加了更多的趣味性。
75.在一些实施例中,如图4和图5所示,画笔12有第一径向凹起,画笔12在第一基座11上无法进行定位,因此在第一基座11上沿着画笔12运动的方向设置第一限位槽1131,使得画笔12的第一径向凸起121能够放入第一限位槽1131中,沿着第一限位槽1131进行滑动。画笔12通过第一基座11上设置限位槽对画笔12进行定位。需要具体说明的是,为了使画笔12沿着竖直方向进行安装,将第一限位槽1131在第一基座11方向沿着竖直方向进行设置,且将第一限位槽1131的下端封闭,上端开口,目的是在进行画笔12和第一基座11进行安装和拆卸的时候方便。
76.需要进一步说明的是,如图4所示,第一限位槽1131下端距离棋盘9的距离取决于画笔12第一径向凸起121安装在第一限位槽1131下端使距离棋盘9的距离。而且,第一限位槽1131下端封闭,上端开口,第一限位槽1131的形状可以是任意形状,示例的,为了美观,也可将第一限位槽1131的形状设置为画笔12的第一径向凸起121相适配的u型。
77.在一些其他的实施例中,如图5所示,第一驱动组件13包括第一驱动电机131和第一旋转盖132,第一旋转盖132的一端与第一驱动电机131传动连接,第一旋转盖132上设有第一滑槽1321,第一滑槽1321与第一限位槽1131形成夹角,第一径向凸起121配合伸入第一滑槽1321内,第一驱动电机131用于驱动第一旋转盖132旋转,且第一旋转盖132的旋转轴与第一径向凸起121平行。第一驱动电机131与第一旋转盖132传动连接,通过第一驱动电机131驱动第一旋转盖132进行旋转,而第一旋转盖132上设置有第一滑槽1321,第一滑槽1321和第一径向凸起121在第一滑槽1321内进行滑动,使得画笔12可以沿着第一基座11竖直方向进行上下滑动。需要具体说明的是,第一滑槽1321长度取决于画笔12沿竖直方向的最大距离。
78.示例的,如图5所示,为了保持在画笔12与第一基座11之间定位安装中保持平衡,需要在画笔12的另一侧设置第一径向凸起121,且画笔12两侧的第一径向凸起121轴线须保持重合,同样的,与两个第一径向凸起121相适配的第一限位槽1131和第一滑槽1321也为两
个同时轴线保持重合。
79.在一些实施例中,如图5所示,第一基座11被分为三部分且固定一体,一部分为第一连接部111,与第一机械臂3连接,一部分为第一驱动安装部112,用于安装第一驱动组件13,而第三部分为画笔壳体部113,画笔壳体部113则用于安装画笔12,使画笔12与画笔壳体部113进行滑动连接。第一基座11将第一机械臂3和画笔12连接起来,通过第一机械臂3传动将画笔12移动到待画画位置,然后画笔12与第一基座11进行滑动完成画画动作。第一基座11中的三部分完成画画的动作,需要具体说明的是,第一基座11的三部分既可以固定一体也可分别设置然后装配成一体。
80.示例地,如图5所示,在画笔12沿着画笔壳体部113竖直方向进行滑动时,因为画笔壳体部113和画笔12之间存在缝隙,画笔12难以保持竖直状态,画出自己想要的画作,为了解决这个问题,本技术的对弈机器人设置画笔12与画笔12至少有部分的外轮廓应与画笔壳体部113的内轮廓相匹配,使得画笔12能够沿着画笔壳体部113的内壁进行滑动,保证画笔12沿着画笔壳体部113的竖直方向进行滑动。
81.需要进一步说明的是,如图4所示,画笔12的笔尖属于刚性材质,在进行画画的时候,可能会存在微小的磕碰现象,容易损坏笔尖,这样,就需要不断的更换画笔,增加了成本,且影响对弈机器人工作。为了避免来回更换画笔12,在画笔12和画笔壳体部113间隙的地方设置缓冲垫7,在画画的时候遇到磕碰缓冲垫7会对画笔12进行缓冲,允许画笔12的笔尖有微小的摆动,保护了画笔12的笔尖,降低了对弈机器人的维护费用。
82.具体地,缓冲垫7可以有各种实现方式,例如,缓冲垫7可以为弹簧、弹片、橡胶垫等等,在一种可能的实现方式中,缓冲垫为橡胶垫,缓冲垫7设置在画笔12和画笔壳体部113的间隙,当画笔12的笔尖有微小摆动时,一侧的缓冲垫7会被压缩,而对应另一侧的缓冲垫7的距离会增大,缓冲垫7易于滑落,因此,在画笔12的径向设有多个固定柱122,将缓冲垫7套设在固定柱122上,避免画笔12的笔尖进行核微笑摆动时,缓冲垫7易于滑落。
83.在一些实施例中,对弈机器人的主要功能为与用户进行下棋,如图6所示,取子装置2中设置第二基座21、取子件22和第二驱动组件23,第二驱动组件23驱动取子件22相对于第二基座21,使得取子件22的端部运动至棋子8位置,顺利抓取或者释放棋子8。
84.在相关技术中,一些对弈机器人的取子件22为了达到定位在第二基座21上的目的,在第二基座21上设置定位通孔或者直接将取子件22的第二径向凸起221直接卡接到第二基座21上的方法。虽然在第二基座21设置定位通孔可以解决定位的目的,但是取子件22不能沿着第二基座21的竖直方向进行运动,而且会造成取子件22和第二基座21的装配困难。另外直接将取子件22的第二径向凸起221直接卡接到第二基座21上,会导致取子件22在第二基座21定位不稳固,且取子件22不能沿着第二基座21的竖直方向进行运动。为了解决取子件22在第二基座21上无法进行定位且能够使取子件22沿着第二基座21的竖直方向进行运动的问题,本技术提出了一种新的解决方案:如图6所示,取子件22有第二径向凹起221,取子件22在第二基座21上无法进行定位,因此在第二基座21上沿着取子件22运动的方向设置第二限位槽2311,使得取子件22的第二径向凸起221能够放入第二限位槽2311中,沿着第二限位槽2311进行滑动。取子件22通过第二基座21上设置限位槽对取子件22进行定位。需要具体说明的是,为了使取子件22沿着竖直方向进行安装,将第二限位槽2311在第二基座21方向沿着竖直方向进行设置,且将第二限位槽2311的下端封闭,上端开口,目的是在
进行取子件22和第二基座21进行安装和拆卸的时候方便。
85.需要进一步说明的是,如图6所示,第二限位槽2311下端距离棋盘9的距离取决于取子件22第二径向凸起221安装在第二限位槽2311下端使距离棋盘9的距离。而且,第二限位槽2311下端封闭,上端开口,第二限位槽2311的形状可以是任意形状,示例的,为了美观,也可将第二限位槽2311的形状设置为取子件22的第二径向凸起221相适配的u型。
86.在一些其他的实施例中,第二驱动组件23有多种实现方式,例如曲柄连杆机构、丝杠螺母机构、齿轮齿条机构等,设置第二驱动组件23的目的是提供一个电机,具体地,电机可以是舵机,以及将电机的旋转扭矩转换为取子件22的直线运动。曲柄连杆机构在完成取子动作的过程中,驱动的刚性较大,抗冲击性能不足,特别是在运动过程中占用的空间大,不利于对弈机器人的整体布局。而丝杠螺母机构在运动过程中,将电机的旋转扭矩转换为取子件的直线运动的过程反馈较长,造成利用丝杠螺母机构的取子件的运动速度较慢。利用齿轮齿条机构的取子装置2在工作过程中,齿轮齿条在传动的时候会产生噪声,影响用户的对弈体验。为了解决取子装置2取子速度慢、占用空间大以及噪声大的问题,本技术提出了一种优选方案。如图7所示,第二驱动组件23包括第二驱动电机231和第二旋转盖232,第二旋转盖232的一端与第二驱动电机231传动连接,第二旋转盖232上设有第二滑槽2321,第二滑槽2321与第二限位槽2311形成夹角,第二径向凸起221配合伸入第二滑槽2321内,第二驱动电机231用于驱动第二旋转盖232旋转,且第二旋转盖232的旋转轴与第二径向凸起221平行。第二驱动电机231与第二旋转盖232传动连接,通过第二驱动电机231驱动第二旋转盖232进行旋转,而第二旋转盖232上设置有第二滑槽2321,第二滑槽2321和第二径向凸起221在第二滑槽2321内进行滑动,使得取子件22可以沿着第二基座21竖直方向进行上下滑动。需要具体说明的是,第二滑槽2321长度取决于取子件22沿竖直方向的最大距离。
87.进一步地,为了保持在取子件22与第二基座21之间定位安装中保持平衡,需要在取子件22的另一侧设置第二径向凸起221,且取子件22两侧的第二径向凸起221轴线须保持重合,同样的,与两个第二径向凸起221相适配的第一限位槽1131和第一滑槽1321也为两个同时轴线保持重合。
88.在一些实施例中,如图7所示,第二基座21被分为三部分且固定一体,一部分为第二连接部211,与第二机械臂4连接,一部分为第二驱动安装部212,用于安装第二驱动组件23,而第三部分为取子件壳体部213,取子件壳体部213则用于安装取子件22,使取子件22与取子件壳体部213进行滑动连接。第二基座21将第二机械臂4和取子件22连接起来,通过第二机械臂4传动将取子件22移动到棋子8的位置,然后取子件22与第二基座21进行滑动完成取子动作。第二基座21中的三部分组合完成取子的动作,需要具体说明的是,第二基座21的三部分既可以固定一体也可分别设置然后装配成一体。
89.示例地,如图8所示,在取子件22沿着取子壳体部213竖直方向进行滑动时,如果取子件22与取子壳体部213不存在缝隙,取子件22沿着取子件壳体部进行滑动时,取子件22与取子件壳体部213的摩擦力较大,需要第二驱动组件23提供更大的动力来克服摩擦力,使取子件22沿着取子壳体部213的竖直方向滑动,增加了对弈机器人的成本。如果取子件壳体部213和取子件22之间存在缝隙,则取子件22沿着取子件壳体部213的竖直方向进行滑动时,取子件22难以保持竖直状态,导致不能顺利抓取或者释放棋子8,为了达到降低摩擦力不增加成本的同时保证取子件22能够沿着取子件壳体部213的竖直方向进行滑动,顺利抓取或
者释放棋子8的目的,本技术的对弈机器人在取子件22壳体部213设置凹部2312,取子件22外轮廓设置凸部222,凹部2312和凸部222相互匹配,使得取子件22的凸部222能够沿着取子件壳体部213的凹部2312进行滑动,保证取子件22沿着取子件壳体部213的竖直方向进行滑动,顺利抓取或者释放棋子8。
90.以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。