1.本发明广泛地涉及基于摩擦电纳米发电机的传感器和包括该传感器的致动器,尤其涉及使用摩擦电纳米发电机传感器对数字孪生进行软抓手感知。
背景技术:
2.整个说明书中对现有技术的任何提及和/或讨论都不应以任何方式被认为是承认该现有技术是众所周知的或形成本领域公知常识的一部分。
3.特别是由于其自供电操作的能力,摩擦电传感器已被提议作为感测应用的良好候选者。
4.[1]lai,y.c.,deng,j.,liu,r.,hsiao,y.c.,zhang,s.l.,peng,w.,
…
&wang,z.l.(2018)。通过自供电、高度可扩展且高度灵敏的摩擦电接近和压力感应皮肤实现主动感知和响应的软体机器人(actively perceiving and responsive soft robots enabled by self
‑
powered,highly extensible,and highly sensitive triboelectric proximity
‑
and pressure
‑
sensing skins)。先进材料,30,1
‑
12。
[0005]
在该论文中,提出的摩擦电皮肤可以经由自发电来感测与外部刺激的接近、接触和压力。但是,无法检测到例如软体机器人所需的连续弯曲运动和变形。
[0006]
[2]chen,j.,chen,b.,han,k.,tang,w.,&wang,z.l.(2019)。摩擦电纳米发电机作为软体
‑
刚性混合致动器的自供电传感器(a triboelectric nanogenerator as a self
‑
powered sensor for a soft
–
rigid hybrid actuator)。先进材料技术,1900337,1
‑
7。
[0007]
在该论文中,可以应用摩擦电触觉传感器以实现接触感测,并获得海绵/多孔结构的反馈电信号。但是,无法检测到滑动接触和接触面积。
[0008]
本发明的实施例试图解决以上问题中的至少一个。
技术实现要素:
[0009]
根据本发明的第一方面,提供了一种基于摩擦电纳米发电机的传感器,其包括:
[0010]
可旋转齿轮,该可旋转齿轮包括相对于齿轮的旋转轴向外延伸的一个或多个凹口,每个凹口包括具有第一电子亲和力的第一材料;
[0011]
分层结构,包括:
[0012]
具有不同于第一电子亲和力的第二电子亲和力的第二材料层;和
[0013]
电极层;
[0014]
其中,可旋转齿轮和分层结构被设置成使得在齿轮旋转期间第一材料与第二材料断续地接触;和
[0015]
带,该带耦接到齿轮,使得齿轮能够通过拉动该带而旋转,从而可以基于经由电极层测量的摩擦电信号来确定齿轮的旋转。
[0016]
根据本发明的第二方面,提供了一种基于摩擦电纳米发电机的传感器,其包括:
[0017]
基板;
[0018]
形成在基板上的电极阵列;和
[0019]
第一材料层,该第一材料层将电极阵列封装在基板上并具有第一电子亲和力;
[0020]
其中,所述电极阵列包括一组间隔开的第一电极和沿着所述一组间隔开的第一电极延伸的第二电极,使得第一材料与第二材料之间的接触位置和接触面积可以基于经由第一电极和第二电极测量的摩擦电信号来确定,所述第二材料具有与第一电子亲和力不同的第二电子亲和力。
[0021]
根据本发明的第三方面,提供了一种致动器,其包括第一方面的基于摩擦电纳米发电机的传感器和/或第二方面的基于摩擦电纳米发电机的传感器。
[0022]
根据本发明的第四方面,提供了一种使用第一方面的基于摩擦电纳米发电机的传感器和/或第二方面的基于摩擦电纳米发电机的传感器的感测方法。
[0023]
根据本发明的第五方面,提供了一种用于基于摩擦电纳米发电机的传感器的制造方法,该方法包括以下步骤:
[0024]
提供可旋转齿轮,其包括一个或多个相对于齿轮的旋转轴向外延伸的凹口,每个凹口包括具有第一电子亲和力的第一材料;
[0025]
提供分层结构,该分层结构包括:
[0026]
具有不同于第一电子亲和力的第二电子亲和力的第二材料层;和
[0027]
电极层;
[0028]
将可旋转齿轮和分层结构设置成使得在齿轮旋转期间第一材料与第二材料断续地接触;和
[0029]
将带耦接到齿轮,使得齿轮能够通过拉动该带而旋转,从而能够基于经由电极层测量的摩擦电信号来确定齿轮的旋转。
[0030]
根据本发明的第六方面,提供了一种基于摩擦电纳米发电机的传感器的制造方法,该方法包括以下步骤:
[0031]
提供基板;
[0032]
提供形成在基板上的电极阵列,其中,该电极阵列包括一组间隔开的第一电极和沿着所述一组间隔开的第一电极延伸的第二电极;和
[0033]
提供第一材料层,该第一材料层将电极阵列封装在基板上并具有第一电子亲和力;并且
[0034]
其中,所述一组间隔开的第一电极和延伸的第二电极被设置成使得第一材料与第二材料之间的接触位置和接触面积能够基于经由第一电极和第二电极测量的摩擦电信号来确定,所述第二材料具有与第一电子亲和力不同的第二电子亲和力。
附图说明
[0035]
通过以下书面描述,仅作为示例,并结合附图,本领域的普通技术人员将更好地理解本发明的实施例,并且本发明的实施例对本领域普通技术人员来说容易理解,其中:
[0036]
图1a示出了说明根据示例实施例的l
‑
teng传感器的示意图。
[0037]
图1b示出了说明根据示例实施例的l
‑
teng传感器的分别对以10mm/s、30mm/s和50mm/s的速度的拉动/拉伸的传感器信号的曲线图。
[0038]
图1c示出了说明根据示例实施例的l
‑
teng传感器的分别对以10mm/s、30mm/s和
50mm/s的速度的恢复/释放时间的传感器信号的曲线图。
[0039]
图1d示出了曲线图和照片,其说明了对于根据示例实施例的l
‑
teng传感器,根据摩擦电输出的峰数可以清楚而轻松地识别弯曲角度。
[0040]
图2a示出了说明根据示例实施例的t
‑
teng传感器的工作机制的示意图。
[0041]
图2b示出了说明根据示例实施例的t
‑
teng传感器的示意图。
[0042]
图2c示出了说明根据示例实施例的通过手指轻敲t
‑
teng传感器的不同位置而生成的负载电压的曲线图。
[0043]
图2d示出了说明根据示例实施例的t
‑
teng传感器的四个短电极的输出比率的曲线图。
[0044]
图2e示出了说明根据示例实施例的t
‑
teng传感器的在手指以正常速度滑过四个电极时的输出电压的曲线图。
[0045]
图2f示出了说明根据示例实施例的t
‑
teng传感器的在手指以快速速度滑过四个电极时的输出电压的曲线图。
[0046]
图2g示出了曲线图,其说明使用根据示例实施例的t
‑
teng传感器的长电极是为了检测接触面积。
[0047]
图3a示出了说明根据示例实施例的用于耦接至l
‑
teng传感器的致动器的操作机制的示意图。
[0048]
图3b示出了展示根据示例实施例的集成致动器和感测系统的配置的照片。
[0049]
图3c示出了说明根据示例实施例的集成致动器和感测系统的输出信号的曲线图,其中,软致动器腔室内的气压为50kpa。
[0050]
图3d示出了说明根据示例实施例的集成致动器和感测系统的输出信号的曲线图,其中,软致动器腔室内的气压为80kpa。
[0051]
图3e示出了说明根据示例实施例的集成致动器和感测系统的输出信号的曲线图,其中,软致动器腔室内的气压为100kpa。
[0052]
图3f示出了说明根据示例实施例的集成致动器和感测系统的输出信号的曲线图,其中,软致动器腔室内的气压为120kpa。
[0053]
图3g示出了说明根据示例实施例的集成致动器和感测系统的输出信号的曲线图,其中,软致动器腔室内的气压为140kpa。
[0054]
图3h示出了说明根据示例实施例的集成致动器和感测系统的输出信号的曲线图,其中,软致动器腔室内的气压为160kpa。
[0055]
图3i示出了曲线图,说明了软致动器的变形角度随着气压的增加而增加,从而导致由根据示例实施例的集成致动器和感测系统在单次致动运动中生成更多输出峰。
[0056]
图4a示出了说明根据示例实施例的软抓手的照片。
[0057]
图4b示出了说明根据示例实施例的软抓手的操作的照片。
[0058]
图4c示出了根据示例实施例的曲线图,其说明了对于沿着软抓手中的t
‑
teng传感器贴片的长度方向的不同接触位置,相同电极(e1、e2、e3和e4)对于相同被抓物体的输出。
[0059]
图4d示出了根据示例实施例的曲线图,其说明了根据示例实施例的软抓手的传感器信号中的电压比率变化以区分软抓手手指的接触位置。
[0060]
图4e示出了曲线图,其说明了根据示例实施例的用于区分抓手的接触运动和分离
运动的软抓手的t
‑
teng传感器的输出。
[0061]
图4f示出了曲线图,其说明了根据示例实施例的用于感知接触面积差的软抓手的t
‑
teng传感器的输出。
[0062]
图5a示出了照片和示意图,说明了根据示例实施例的定制的基于svm的分析平台及其示例应用。
[0063]
图5b示出了根据示例实施例的曲线图和照片,说明了使用定制的基于svm的分析平台对于不同物体收集的6通道(在该示例实施例中,一个通道用于l
‑
teng传感器,五个通道用于t
‑
teng传感器)信号。
[0064]
图5c示出了说明根据示例实施例的使用定制的基于svm的分析平台的用于对象识别的验证结果的图表。
[0065]
图5d示出了在数字孪生应用中根据示例实施例的集成teng传感器的智能抓手的照片和屏幕细节。
[0066]
图6示出了说明根据示例实施例的基于摩擦电纳米发电机的传感器的示意图。
[0067]
图7示出了说明根据示例实施例的基于摩擦电纳米发电机的传感器的示意图。
[0068]
图8示出了根据示例实施例的流程图,说明了基于摩擦电纳米发电机的传感器的制造方法。
[0069]
图9示出了根据示例实施例的流程图,说明了基于摩擦电纳米发电机的传感器的制造方法。
具体实施方式
[0070]
本发明的实施例提供了具有高灵敏度的柔性摩擦电纳米发电机(teng)传感器,其可以例如用于软抓手感知应用。在一个实施例中,提出了一种具有基于齿轮的结构的长度teng(l
‑
teng)传感器,以捕获软抓手的连续运动,并通过计数teng输出的峰数来测量变形。在另一实施例中,提供了具有图案化电极的柔软、挠性和薄的触觉teng(t
‑
teng)传感器,实现对滑动、触摸和接触面积的敏感性,该传感器可以集成在抓手上。利用根据示例实施例的特殊分布式电极设计,t
‑
teng传感器也可以通过比较在不同电极中生成的信号来感知接触位置。然后,在另一实施例中,从l
‑
teng和t
‑
teng传感器收集的多参数感觉信息被综合融合并通过支持向量机(svm)算法进行训练,以识别各种物体,物体识别准确度为97.08%。成功地进行了根据示例实施例的数字孪生(其根据软体机器人系统的实时操作模拟物体识别和机器人运动)的演示,并且该演示展示了例如在未来的无人仓库应用中的前景。
[0071]
在图1中示出了根据示例实施例的l
‑
teng传感器100的工作机理,其中,使用了四齿齿轮102。如图1a所示,l
‑
teng传感器100由具有铜电极106的聚四氟乙烯(ptfe)层104和覆盖有镍织物的齿轮102构成,该镍织物可以在齿轮102旋转时感应脉冲信号。
[0072]
注意,在不同的实施例中,齿轮可以直接由相关材料制成。而且,在不同的实施例中,与ptfe相比,可以使用另一种正摩擦电材料,例如铁、铜等。
[0073]
当齿(例如108)开始接触ptfe层104时,ptfe层104趋于吸引电子,由于电子亲和力的差异,该电子会保留在其表面上,而齿(例如108)上的镍织物层趋于失去电子,并且因此在接触表面上产生摩擦电静电荷。当通过拉动/释放缠绕在齿轮102上的软带110(该软带110在此示例实施例中又被弹簧机构109偏置)来驱动齿轮102旋转时,在将软带110从齿轮
108上解绕/再次缠绕到齿轮108上时ptfe层104和齿轮的齿(例如108)之间的断续接触将导致cu电极106和接地之间的电势连续交替,从而驱动电子流动并生成循环的输出峰。海绵材料层105类似于弹簧,以允许齿轮的齿(例如108)弹性接触ptfe层104。否则,齿轮102更有可能卡住。因此,在该示例实施例中,海绵材料层105还可以有利地提供对来自制造或组装的误差的容限。
[0074]
对于测试,l
‑
teng传感器100的软带110分别以10mm/s、30mm/s和50mm/s的速度被拉动和释放,并且在拉伸和释放过程期间生成的信号可见于图1b
‑
c中。当外部负载较小时,此l
‑
teng传感器100可以以5mm的最小分辨率检测位移,具有可接受的错误率为8.3%。图1d示出了根据摩擦电输出的峰数可以清楚而轻松地识别弯曲角度。特别地,人手指充当致动器,并且根据示例实施例的l
‑
teng传感器在软带的端部固定在手指尖的情况下耦接到人手指,并且经由环沿着手指的长度被引导,如图1d中的插图所示。由于手指上表面长度的增加,当手指关节向手掌旋转时,l
‑
teng传感器会感测到带被拉动。相反地,当手指关节沿相反方向旋转时,手指的上表面的长度减小并且所述带被绕回。
[0075]
图2示出了根据示例实施例的t
‑
teng传感器200的工作机制。t
‑
teng传感器200中的短电极被标记为e1至e4,并且长电极被标记为e
l
。如图2a所示,具有图案化电极的t
‑
teng传感器200能够检测接触位置。具体地,在该示例实施例中,t
‑
teng传感器200包括柔性聚对苯二甲酸乙二醇酯(pet)基板201;含ni织物203,其中,对ni进行图案化以提供电极e1‑
e4和e
l
;以及将含镍织物203嵌入到per基板201上的硅树脂层205。
[0076]
针对示例实施例描述的制造方法具有低成本和容易制造的优点。然而,应当注意,在不同的实施例中可以使用其他方法,例如,使用掩模/蚀刻技术的沉积。
[0077]
由于四个(例如但不限于四个)短电极e1‑
e4沿t
‑
teng传感器贴片的分布,不同电极中的感应电荷量会根据电极与接触点之间的距离而不同。基于这种现象,可以通过计算这四个短电极的电压比率,利用输出来确定接触点的位置。此外,长电极e
l
被设计用于检测总接触面积,并感知点接触或表面接触,例如以感知抓手中的抓取模式。如图2a(iv)所示,随着接触面积增加,来自长电极e
l
的输出也将增加。注意,对于图2a(iv)右侧的虚线图,是通过在传感器上轻敲较大区域而不是点接触来获得的,而对于左侧图则是轻敲点接触来获得。通过手指轻敲此t
‑
teng传感器的不同位置而生成的负载电压如图2c所示。为了进一步分析辨别能力,可以如图2d所示计算这四个短电极的输出比率(其可以被列为),其中,e
i
表示第i个电极的输出。可以看出,当在电极(e1‑
e4)的正上方轻敲时,该比率保持为高(超过93%)。而对于轻敲中间位置,电压比率在之间波动,但考虑到其最小检测分辨率为10mm(在以20mm间隔布置的电极的情况下),但这也应该被认为是合理的结果。图2e
‑
f显示了手指分别以正常速度和快速速度滑过四个电极的输出电压。在这种模式下,可以根据相邻峰之间的时间间隔来计算滑动速度,其中,时间间隔越短意味着滑动速度越快。沿t
‑
teng传感器200的长度方向定位的长电极e
l
用于检测软体机器人手指与被抓物体之间的接触面积,参见图2g,其中,示出了e
l
对于分别在e1、e2和e3附近的位置上进行的不同接触的输出电压,其中,在从大约1秒到大约8秒的时间窗内一个电极宽度,在从大约8秒到大约11秒的时间窗内在具有等于从e1到e2的距离的长度的区域中进行接触,并且在从大约11秒到大约14秒的时间窗内在具有等于从e1到e4的距离的长度的区域
中进行接触。
[0078]
图3示出了根据示例实施例的l
‑
teng传感器300在软体机器人应用中的相容性。图3a示出了示意图,说明了用于耦接至l
‑
teng传感器300的致动器的操作机制。图3b示出了展示根据示例实施例的集成的致动器和感测系统302的配置的照片,其中,l
‑
teng传感器300的软带304由布置在致动器306表面上并通过束线带固定在致动器306的端点308处的小环引导。为了验证输入气压和弯曲角度之间的关系,在各种气压下驱动与l
‑
teng传感器300集成的软致动器306,并记录l
‑
teng传感器300的实时信号。图3c
‑
图3h示出了l
‑
teng传感器300的输出信号,其中,软致动器306腔室310中的气压分别为50kpa、80kpa、100kpa、120kpa、140kpa和160kpa。结果表明,软致动器306的变形角度随着气压的增加而增加,从而导致在单次致动运动中,l
‑
teng传感器300生成更多的输出峰(图3i)。在相对较快的弯曲速度下,仍然可以通过图3e
–
图3h中所示的生成输出峰的细节来清楚地识别弯曲运动。在图3i的曲线312中,随着气压的增加,弯曲程度和峰数之间几乎呈线性关系,这证明了使用该l
‑
teng传感器300的输出信号测量软致动器306的弯曲角度的可行性。图3i中测得的弯曲角度是与如图3b所示的原始位置相比的相对角度。
[0079]
为了研究根据示例实施例的t
‑
teng传感器400是否能够感知用于根据示例实施例的软抓手402的外部刺激,将t
‑
teng传感器400贴片附着到抓手402的手指404的内表面上,并在抓取过程中直接与物体表面接触,如图4a
‑
图4b所示。l
‑
teng传感器(例如405)设置在其他手指(例如407)上。考虑到软抓手402的对称结构,在该示例实施例中只有一个手指404附着有t
‑
teng传感器400,以减少感觉信息的复杂性而不丢失重要信息。在该示例实施例中,在手指404上没有设置l
‑
teng传感器。分别如图4b的i
‑
iii、iv和v
‑
vii和viii所示,该t
‑
teng传感器400集成的抓手402被成功地演示为在相同的输入气压(160kpa)下抓取各种尺寸的物体,包括橙、蛋、青苹果和萝卜。由于沿着t
‑
teng传感器400贴片的长度方向的接触位置不同(图4c),用于相同被抓取物体的相同电极(e1、e2、e3和e4)的输出也会发生变化。例如,当在贴片的尖端位置(左图和插图)抓取苹果时,e1中的传感器信号要高于其他信号。当在软致动器的中间位置(中间图和插图)抓取苹果时,与尖端接触情况相比,e2和e3的输出增加,最高输出仍在e1中,而最低输出在e4中。原因是这四个分布的短电极的输出与接触位置和相应电极之间的距离成反比。距离越近,电极中将感应出更多的电荷,从而生成更高的输出。基于图4c中的结果的图4d中该比率变化足以被区分,使得其可以用于容易地感知软抓手402的手指的接触位置。另外,t
‑
teng传感器400还可以区分抓手402的接触运动和分离运动,因为接触运动生成正峰,例如410,而分离运动生成负峰,例如,如图4e所示的412。通过比较在尖端抓取模式和普通工作模式下抓取不同尺寸的物体时在e
l
中生成的信号,如图4f所示,也可以感知接触面积的差异。显然,由于更大的接触面积,因此具有更大曲率的物体可以在e
l
中生成更高的输出。
[0080]
注意,根据示例实施例的t
‑
teng传感器还可以与人手指耦接作为接触传感器,不管具有还是不具有根据示例实施例的l
‑
teng(比较图1d中的插图照片)。
[0081]
在图5a中,开发了根据示例实施例的定制的基于svm的分析平台,然后将其用于根据示例实施例的teng传感器集成的智能软体机器人抓手中,以建立ai增强的自动分拣系统。在该示例实施例中,由于该软抓手的对称结构,仅将根据示例实施例的一个t
‑
teng传感器和根据示例实施例的一个l
‑
teng传感器分别布置在两个不同的软致动器手指上,如图5a
的左侧的照片所示,以减少信息的复杂性同时保留重要的感觉信息进行分类。首先,通过包括模数转换器(adc)和微控制器单元(mcu)的硬件电路506收集并处理在l
‑
teng传感器和t
‑
teng传感器中生成的模拟电压信号。随后,测试t
‑
teng传感器和l
‑
teng传感器的信号,并在数据收集过程508期间将其与相应的物体标签一起记录。在图5b中可视化了对于不同物体的详细的所收集的6通道(在该示例实施例中为l
‑
teng传感器的一个通道,t
‑
teng传感器的五个通道)信号。在此过程中,通过重复抓取和释放运动,相应地收集了具有六种不同形状的物体的数据,这些物体包括立方体、长圆柱体、短圆柱体、大球体、小球体和环。每个物体被测试200次,以确保数据集的可靠性。每个数据集的200个样本按8:2的比率随机分为两组,其中,160个样本用于训练,而其他样本用于测试。在通过主成分分析(pca)510进行特征提取过程之后,使用多类svm分类器512对这些被抓取的物体进行分类。验证结果表明经训练的模型514具有物体识别的高阳性预测值(ppv)和真阳性率(tpr),并且如图5c所示,总识别准确度达到97.08%。可以例如应用本发明的实施例以在真实空间中建立自动分拣组装线516。
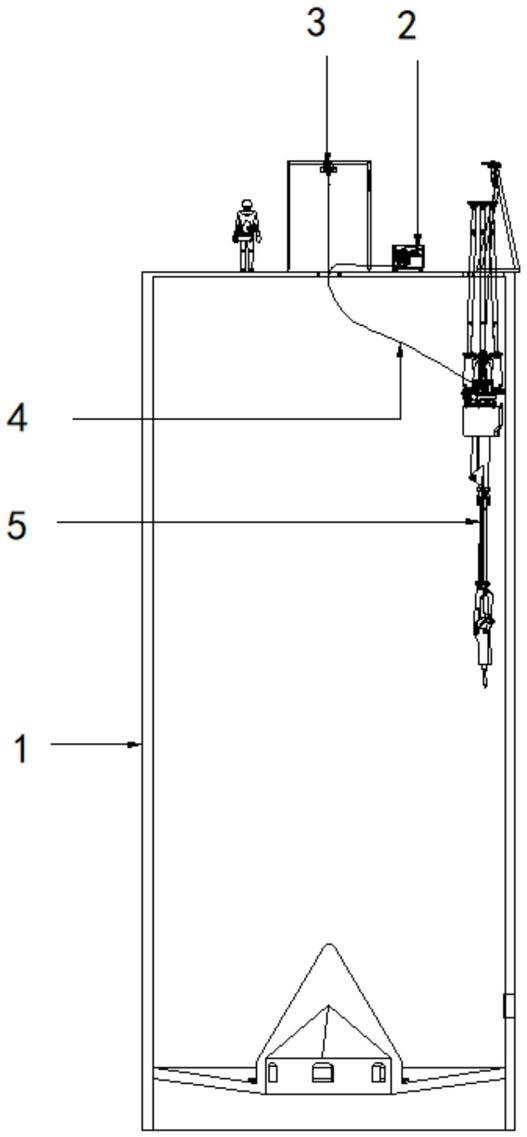
[0082]
为了展示根据示例实施例的teng传感器集成的智能抓手在未来的数字孪生应用中的潜力(图5d),根据示例实施例开发了无人仓库系统,该无人仓库系统可以实现无相机环境中的自动分拣和实时监控,其中,在真实空间中的识别结果可以实时投射到虚拟空间。当系统运行时,将物体随机布置以由软抓手抓取,然后,将由经训练的svm模型根据输入信号来识别被抓取的物体,其中,由根据示例实施例的l
‑
teng和t
‑
teng传感器来收集的所述输入信号。如图5d所示,膝上型计算机屏幕的左上角显示了每个被抓取物体的信号波形和相应的识别结果。然后,抓取放置在地面上的虚拟物体,并将其放置在相应的盒子中,作为与软体机器人抓手在真实空间中抓取并被预测系统识别的相同物体。
[0083]
图6示出了说明根据示例实施例的基于摩擦电纳米发电机的传感器600的示意图,该传感器600包括:可旋转齿轮602,该可旋转齿轮602包括相对于齿轮602的旋转轴606向外延伸的一个或多个凹口(例如604),每个凹口(例如604)包括具有第一电子亲和力的第一材料;分层结构608,该分层结构608包括具有不同于第一电子亲和力的第二电子亲和力的第二材料层610,和电极层612;其中,可旋转齿轮602和分层结构608被设置成使得在齿轮602旋转期间第一材料与第二材料断续地接触;和带614,该带614耦接到齿轮602,使得齿轮602能够通过拉动该带614而旋转,从而可以基于经由电极层612测量的摩擦电信号来确定齿轮602的旋转。
[0084]
当该带614上的拉力小于偏置力时,齿轮602可被偏置以收回该带614。
[0085]
该带614可被构造成耦接到用于拉动带614的致动器。
[0086]
该带614可构造成耦接至致动器,使得所述致动器的弯曲运动引起带614的拉动。
[0087]
该致动器可以包括人手指或机器人手指。
[0088]
可以将机器人手指配置用于无人仓库应用。
[0089]
该致动器可以被配置为耦接到用于生成数字孪生的计算机系统。
[0090]
该带614可以由软材料制成。
[0091]
第一材料可以涂覆在凹口(例如604)上。
[0092]
第一材料可以包括含金属的织物。
[0093]
第二材料可以包括ptfe。
[0094]
图7示出了说明根据示例实施例的基于摩擦电纳米发电机的传感器700的示意图,其包括:基板702;形成在基板702上的电极阵列704;第一材料层705,该第一材料层705将电极阵列704封装在基板702上并具有第一电子亲和力;其中,该电极阵列704包括一组706间隔开的第一电极(例如708)和沿着所述一组706间隔开的第一电极(例如708)延伸的第二电极710,使得第一材料与第二材料之间的接触位置和接触面积可以基于经由第一电极和第二电极(例如708、710)测量的摩擦电信号来确定,该第二材料具有与第一电子亲和力不同的第二电子亲和力。
[0095]
该基板702可以被配置为耦接到致动器。
[0096]
该致动器可以包括人手指或机器人手指。
[0097]
可以将机器人手指配置用于无人仓库应用。
[0098]
该致动器可以被配置为耦接到用于生成数字孪生的计算机系统。
[0099]
该基板702可以由柔性材料制成。
[0100]
第一材料可以包括硅树脂。
[0101]
该电极阵列704可以包括含金属的织物。
[0102]
在其他实施例中,提供了包括传感器600和/或传感器700的致动器。
[0103]
该致动器可以包括人手指或机器人手指。
[0104]
该机器人手指可以被配置用于无人仓库应用。
[0105]
该致动器可以被配置为耦接到用于产生数字孪生的计算机系统。
[0106]
在其他实施例中,提供了使用传感器600和/或传感器700的感测方法。
[0107]
图8示出了流程图800,说明了根据示例实施例的基于摩擦电纳米发电机的传感器的制造方法。在步骤802,提供可旋转齿轮,其包括相对于齿轮的旋转轴向外延伸的一个或多个凹口,每个凹口包括具有第一电子亲和力的第一材料。在步骤804,提供分层结构和电极层,该分层结构包括:具有不同于第一电子亲和力的第二电子亲和力的第二材料层。在步骤806,将可旋转齿轮和分层结构设置成使得在齿轮旋转期间第一材料与第二材料断续地接触。在步骤808,将带耦接到齿轮,使得齿轮能够通过拉动该带而旋转,从而可以基于经由电极层测量的摩擦电信号来确定齿轮的旋转。
[0108]
图9示出了流程图900,说明了根据示例实施例的基于摩擦电纳米发电机的传感器的制造方法。在步骤902,提供基板。在步骤904,提供形成在基板上的电极阵列,其中,该电极阵列包括一组间隔开的第一电极和沿着该组间隔开的第一电极延伸的第二电极。在步骤906,提供第一材料层,该第一材料层将电极阵列封装在基板上并具有第一电子亲和力;其中,该组间隔开的第一电极和延伸的第二电极被设置成使得第一材料与第二材料之间的接触位置和接触面积可以基于经由第一电极和第二电极测量的摩擦电信号来确定,所述第二材料具有与第一电子亲和力不同的第二电子亲和力。
[0109]
本发明的实施例可以具有以下一个或多个特征以及相关的益处/优点:
[0110]
本发明实施例的工业应用可以包括但不限于:无相机环境中的机器人辅助智能制造监控、无人仓库、自动分拣组装线、产品生命周期管理等。
[0111]
本文描述的系统和方法的各个方面可以被实现为编程到各种电路中的任一种中的功能,该电路包括可编程逻辑器件(pld),例如现场可编程门阵列(fpga)、可编程阵列逻辑(pal)器件、电可编程逻辑和存储设备以及基于标准单元的设备,以及专用集成电路(asic)。用于实现系统各方面的一些其他可能性包括:具有存储器(例如电可擦可编程只读存储器(eeprom))的微控制器、嵌入式微处理器、固件、软件等。此外,系统的各方面可以体现在具有基于软件的电路仿真的微处理器、离散逻辑(顺序和组合)、定制设备、模糊(神经)逻辑、量子设备以及上述任何设备类型的混合中。当然,可以以各种组件类型提供底层设备技术,例如,诸如互补金属氧化物半导体(cmos)的金属氧化物半导体场效应晶体管(mosfet)技术、诸如发射极耦合逻辑(ecl)的双极技术、聚合物技术(例如,硅共轭聚合物和金属共轭聚合物
‑
金属结构)、模拟和数字混合等。
[0112]
系统和方法的说明实施例的以上描述并非旨在穷举或将系统和方法限制为所公开的精确形式。尽管本文出于说明性目的描述了系统组件和方法的特定实施例和示例,但是如相关领域的技术人员将认识到的,在系统、组件和方法的范围内可以进行各种等效修改。本文提供的系统和方法的教导可以应用于其他处理系统和方法,而不仅适用于上述系统和方法。
[0113]
本领域技术人员将理解的是,在不脱离如广泛描述的本发明的精神或范围的情况下,可以对具体实施方式中所示的本发明进行多种变化和/或修改。因此,本实施例在所有方面都应被认为是说明性的而不是限制性的。同样,本发明包括针对不同实施例(包括在发明内容部分)描述的特征的任何组合,即使特征或特征组合在权利要求或具体实施例的详细描述中未明确指定。
[0114]
通常,在随附的权利要求书中,所使用的术语不应解释为将系统和方法限制为说明书和权利要求书中公开的特定实施例,而应解释为包括在权利要求书下操作的所有处理系统。因此,系统和方法不受本公开的限制,而是系统和方法的范围将完全由权利要求书确定。
[0115]
除非上下文清楚地另外要求,否则在整个说明书和权利要求书中,词语“包括”、“包含”等应理解为包含性含义,而不是排他性或穷举性含义;也就是说,“包括但不限于”的含义。使用单数或复数的词也分别包括复数或单数。另外,词语“本文”、“此后”、“上文”、“下文”以及类似含义的词语整体上是指本技术,而不是指本技术的任何特定部分。当单词“或”用于指两个或多个项目的列表时,该词涵盖该单词的以下所有解释:列表中的任何项目、列表中的所有项目以及列表中项目的任何组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。