1.本实用新型属于工程机械技术领域,具体涉及一种集成控制阀、牙轮钻机的自动卸杆钳液压系统及卸杆钳。
背景技术:
2.牙轮钻机应用于大型露天矿的爆破孔钻孔作业。不同矿区对钻孔深度有着不同的要求,而钻杆尺寸通常是标准的,单根钻杆的长度是一定的,很难适应各种工况。为了满足不同的钻孔深度要求,牙轮钻机一般都配有一个储杆器,用于储存若干根钻杆。钻孔时,操作手会根据需求,在动力头上依次安装多根钻杆。
3.在钻完一个孔之后,钻机要移动至下一个孔位继续钻孔。因此,需要将处于上部的钻杆依次拆卸下来,放回储杆器,然后用动力头将最后一根钻杆从孔中提至地面以上高度,此时才能移动钻机。在钻孔过程中,两根钻杆之间的螺纹随着动力头的旋转越来越紧。因此,在拆卸钻杆时,单靠动力头的扭矩有时无法顺利地将钻杆卸开。所以,牙轮钻机一般都配备一个额外的卸杆钳,用于辅助卸杆。
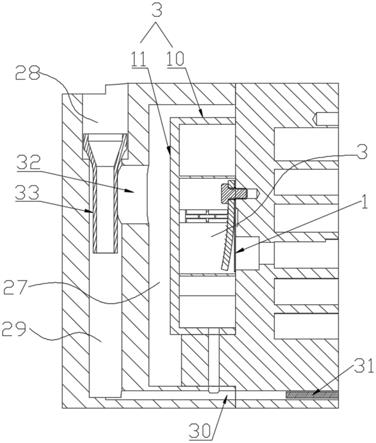
4.自动卸杆钳是一种常用的牙轮钻机的结构,操作方便,省时省力。图1示出了申请人所涉及的一种自动卸杆钳,该自动卸杆钳通过三个液压缸实现卸杆操作,分别是摆动液压缸300、夹紧液压缸301和旋转液压缸302。摆动液压缸用于将卸杆钳整体结构摆动至钻杆附近,夹紧液压缸用于将钳嘴夹住上部待卸的钻杆,旋转液压缸用于输出旋转扭矩将待卸钻杆从下部钻杆的顶部螺纹处卸开。
5.然而,对于该自动卸杆钳,缺少一个稳定可靠的液压系统,实现其液压控制。
技术实现要素:
6.技术问题:本实用新型针对现有的自动卸杆钳缺少稳定可靠的液压系统的问题,首先提供一种集成控制阀,将该集成控制阀应用与自动卸杆钳的液压系统中,提出了用于自动卸杆钳的液压系统,从而实现自动卸杆钳的稳定可靠液压控制;并进一步地,提供了一种自动卸杆钳,从而实现牙轮钻机的快速卸杆。
7.技术方案:一方面,本实用新型提供一种集成控制阀,包括阀体,所述阀体上设置有第一进油口、第二进油口、第一回油口、第二回油口、第一工作油口、第二工作油口、第三工作油口、第四工作油口、第五工作油口、第六工作油口;
8.所述阀体中设置有第一液压锁、第二液压锁,所述第一液压锁的v1口与第一进油口连接,v2口与第一回油口连接,c1口与第一工作油口连接,c2口与第二工作油口连接;
9.所述第二液压锁的v1口与第二进油口连接,v2口与第二回油口连接,c1口分别与第三工作油口和第五工作油口连接,c2口分别与第四工作油口和第六工作油口连接;
10.所述第二液压锁的c1口至第六工作油口的油路上设置有顺序阀和单向阀,所述单向阀与顺序阀并联;
11.所述第一液压锁的c2口至第二工作油口的油路上设置有节流阀。
12.将该集成控制阀应用于现有的牙轮钻机的自动卸杆钳的液压系统中时,可实现自动卸杆钳稳定可靠的液压控制。利用该集成控制阀,在工作时,当摆动液压缸伸出到位后,利用第一液压锁用于锁住摆动液压缸,从而保持自动卸杆钳的摆动位置不移动,从而防止卸杆钳摆动到卸杆位置后发生移动,导致夹紧油缸夹不到钻杆,卸杆失败;以及防止自动卸杆钳在不工作的时候自由摆动,导致安全事故。同样,第二液压锁可以在夹紧液压缸和转动液压缸伸出到位后,将两个液压缸的位置所动,防止液压缸自由运动,致使人员收到伤害。并且,通过顺序阀实现了夹紧液压缸和转动液压缸在伸出时的依次动作。利用节流阀可以增加摆动液压缸伸缩时的阻力,避免自动卸杆钳摆动过程中速度过快、出现晃动。从而,保证了自动卸杆钳的液压系统稳定可靠。
13.进一步的,所述阀体中还设置有第一溢流阀,所述第一溢流阀的进口与第一进油口连接,出口与第一回油口连接。通过第一溢流阀限制摆动液压缸的最大输出力,以防对摆动液压缸自身和自动卸杆钳的结构件造成伤害。
14.进一步的,所述阀体中还设置有第二溢流阀,所述第二溢流阀的进口与第二进油口连接,出口与第二回油口连接。通过第二溢流阀进行泄油限制夹紧液压缸和转动液压缸的最大输出力,以防对夹紧液压缸和转动液压缸自身及自动卸杆钳的结构件造成伤害。
15.进一步地,所述顺序阀的泄油口与第二液压锁的c2口连接。
16.进一步地,所述阀体上还设置有第三回油口,所述顺序阀的泄油口与第三回油口连接。
17.通过上述两种方式,实现了顺序阀的泄油。
18.另一方面,本实用新型还提供一种牙轮钻机的自动卸杆钳液压系统,包括:第一换向阀、第二换向阀、第一液压缸、第二液压缸、第三液压缸、控制手柄、权利要求1-5任一项所述的集成控制阀、压力油源、油箱;
19.第一换向阀的p口与压力油源连接,t口与油箱连接,a口与集成控制阀的第一进油口连接,b口与第一回油口连接,第一换向阀的右侧电磁铁b连接与控制手柄的上控制位连接,第一换向阀的左侧电磁铁a连接与控制手柄的下控制位连接;
20.第二换向阀的p口与压力油源连接,t口与油箱连接,a口与集成控制阀的第二进油口连接,b口与第二回油口连接,第二换向阀的右侧电磁铁b连接与控制手柄的右控制位连接,第二换向阀的左侧电磁铁a连接与控制手柄的左控制位连接;
21.第一液压缸的有杆腔与集成控制阀的第一工作油口连接,无杆腔与第二工作油口连接;第二液压缸的有杆腔与集成控制阀的第三工作油口连接,无杆腔与第四工作油口连接;第三液压缸的有杆腔与集成控制阀的第五工作油口连接,无杆腔与第六工作油口连接。
22.该液压系统,利用一个控制手柄进行操控,实现了对现有的自动卸杆钳的稳定可靠的液压控制,从而让牙轮钻机实现快速卸杆,而且均是通过液压控制,较少了操作人员的危险。提高了卸杆效率,降低了卸杆危险,省时省力。
23.进一步地,所述第一换向阀和第二换向阀均为三位四通y型比例方向阀,从而使得卸杆钳的运动速度可根据需求自由调节,并且更加平稳、安全,减少冲击。
24.同时,本实用新型还提供一种牙轮钻机自动卸杆钳,利用了实施例中所提供的液压系统进行液压控制。利用该卸杆钳,实现牙轮钻机的快速卸杆。
25.综上,本实用新型与现有技术相比,提供了一种针对现有的自动卸杆钳的新的液
压系统及相应的集成控制阀,实现了自动卸杆钳的稳定可靠的液压控制,从而使得牙轮钻机能够快速卸杆,提高了卸杆效率,降低了卸杆危险,省时省力。
附图说明
26.图1为本实用新型的实施例所针对的自动卸杆钳的结构示意图;
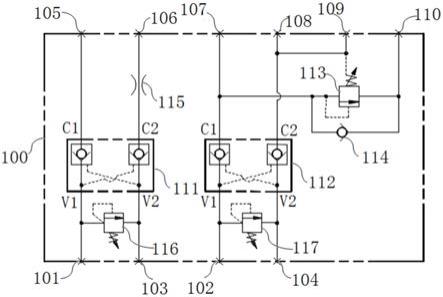
27.图2为本实用新型的实施例中一种集成控制阀的原理图;
28.图3为本实用新型的实施例中另一种集成控制阀的原理图;
29.图4为本实用新型的实施例中一种自动卸杆钳的液压系统的原理图。
30.图中有:100、阀体;101、第一进油口;102、第二进油口;103、第一回油口;104、第二回油口;105、第一工作油口;106、第二工作油口;107、第三工作油口;108、第四工作油口;109、第五工作油口;110、第六工作油口;111、第一液压锁;112、第二液压锁;113、顺序阀;114、单向阀;115、节流阀;116、第一溢流阀;117、第二溢流阀;118、第三回油口;
31.200、第一换向阀;201、第二换向阀;202、压力油源;203、油箱;204、控制手柄204;205、第一液压缸;206、第二液压缸;207、第三液压缸;208、上控制位;209、下控制位;210、左控制位;211、右控制位;
32.300、摆动液压缸;301、夹紧液压缸;302、转动液压缸。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
35.并且,对于术语“第一”、“第二”等仅是为了便于描述,并不能理解为对数量等的限制。
36.图2示出了本实用新型的一个实施例中的集成控制阀的原理图。结合图2,本实用新型的一个实施例中,集成控制阀包括阀体100,所述阀体100上设置有第一进油口101、第二进油口102、第一回油口103、第二回油口104、第一工作油口105、第二工作油口106、第三工作油口107、第四工作油口108、第五工作油口109、第六工作油口110。阀体100中设置有第一液压锁111、第二液压锁112,第一液压锁111的v1口与第一进油口101连接,v2口与第一回油口103连接,c1口与第一工作油口105连接,c2口与第二工作油口106连接。第二液压锁112的v1口与第二进油口102连接,v2口与第二回油口104连接,c1口分别与第三工作油口107和第五工作油口109连接,c2口分别与第四工作油口108和第六工作油口110连接。第二液压锁112的c1口至第六工作油口110的油路上设置有顺序阀113和单向阀114,单向阀114与顺序阀113并联;更具体的,是单向阀114的进口与第六工作油口110连接,出口与第二液压锁112的c1口连接。第一液压锁111的c2口至第二工作油口106的油路上设置有节流阀115。
37.所提供的集成控制阀的工作原理如下:
38.在将集成控制阀应用于牙轮钻机的自动卸杆钳的液压系统中时,第一工作油口105与摆动液压缸的无杆腔连接,第二工作油口106与摆动液压缸的有杆腔连接;第三工作油口107与夹紧液压缸的无杆腔连接,第四工作油口108与夹紧液压缸的有杆腔连接;第五工作油口109与转动液压缸的无杆腔连接,第六工作油口110与转动液压缸的有杆腔连接。
39.第一进油口101可通过换向阀与压力油源连接,第一回油口103可通过换向阀与油箱连接;第二进油口102可通过换向阀与压力油源连接,第二回油口104可通过换向阀与油箱连接。在工作时,从第一进油口101进入的液压油通过第一液压锁111进入摆动液压缸的无杆腔,摆动液压缸伸出,可以将自动卸杆钳摆动至待卸钻杆附近;当从第一回油口103通入液压油时,液压油经过第一液压锁111进入摆动液压缸的有杆腔,摆动液压缸缩回,使自动卸杆钳摆动至非工作位置。
40.当从第二进油口102通入液压油时,液压油进过第二液压锁112进入夹紧液压缸的无杆腔,推动夹紧液压缸伸出,推动卸杆钳的钳嘴夹住待卸钻杆;然后第二进油口102至第六工作油口110的油路中液压油压力进一步升高,因为由于单向阀114的进口与第六工作油口110连接,出口与第二液压锁112的c1口连接,因此液压油不会从单向阀114中通过,从而使得顺序阀113打开,液压油进入转动液压缸的无杆腔,推动转动液压缸伸出,从而旋转卸杆钳的钳嘴将待卸钻杆卸开。
41.当从第二回油口104通入液压油时,液压油经过第二液压锁112分别进入夹紧液压缸和转动液压缸的有杆腔,夹紧液压缸和转动液压缸同时缩回,带动钳嘴离开被卸钻杆。在集成控制阀中,第一液压锁用于锁住摆动液压缸,从而保持自动卸杆钳的摆动位置不移动,其作用有两个:1)防止卸杆钳摆动到卸杆位置后发生移动,导致夹紧油缸夹不到钻杆,卸杆失败;2)防止自动卸杆钳在不工作的时候自由摆动,导致安全事故。
42.同样,设置第二液压锁112,可以在夹紧液压缸和转动液压缸伸出到位后,将两个液压缸的位置所动,防止液压缸自由运动,致使人员收到伤害。
43.同时通过顺序阀113,实现了夹紧液压缸和转动液压缸在伸出时的依次动作。在本实用新型的实施例中,节流阀115可以增加摆动液压缸伸缩时的阻力,避免自动卸杆钳摆动过程中速度过快、出现晃动。
44.通过上述的集成控制阀,当应用于自动卸杆钳的液压系统中时,在实现卸杆钳的工作目的的同时,也比较稳定可靠。
45.进一步地,在本实用新型的实施例中,阀体100中还设置有第一溢流阀116,第一溢流阀116的进口与第一进油口101连接,出口与第一回油口103连接。通过设置第一溢流阀116,当摆动液压缸的油路中,压力超过第一溢流阀116的额定压力时,通过第一溢流阀116进行泄油,从而限制摆动液压缸的最大输出力,以防对摆动液压缸自身和自动卸杆钳的结构件造成伤害。
46.进一步地,在阀体100中还设置有第二溢流阀117,第二溢流阀(117)的进口与第二进油口102连接,出口与第二回油口104连接。同样道理,通过设置第二溢流阀117,当夹紧液压缸和转动液压缸的油路中,压力超过第二溢流阀117的额定压力时,通过第二溢流阀117进行泄油,从而限制夹紧液压缸和转动液压缸的最大输出力,以防对夹紧液压缸和转动液压缸自身及自动卸杆钳的结构件造成伤害。
47.在本实用新型的一个实施例中,顺序阀113的泄油口与第二液压锁112的c2口连
接。此时,顺序阀113可以直接通过第二液压锁112泄油到油箱,通过这种形式,可以减少管路连接,使得结构简化。
48.此外,在本实用新型的另一种实施例中,如图3所示,可以在阀体100上设置第三回油口118,顺序阀113的泄油口与第三回油口118连接。此时,可以直接将第三回油口118连接油箱,然后顺序阀113的泄油直接进入油箱。
49.基于本实用新型的实施例中所提供的集成控制阀,提供了一种牙轮钻机自动卸杆钳液压系统。如图4所示,该液压系统包括:第一换向阀200、第二换向阀201、第一液压缸205、第二液压缸206、第三液压缸207、控制手柄204、集成控制阀、压力油源202、油箱203;
50.第一换向阀200的p口与压力油源202连接,t口与油箱203连接,a口与集成控制阀的第一进油口101连接,b口与第一回油口103连接,第一换向阀200的电磁铁b连接与控制手柄204的上控制位208连接,第一换向阀200的电磁铁a连接与控制手柄204的下控制位209连接。
51.第二换向阀201的p口与压力油源202连接,t口与油箱203连接,a口与集成控制阀的第二进油口102连接,b口与第二回油口104连接,第二换向阀201的电磁铁b连接与控制手柄204的右控制位211连接,第二换向阀201的电磁铁a连接与控制手柄204的左控制位210连接。
52.第一液压缸205的有杆腔与集成控制阀的第一工作油口105连接,无杆腔与第二工作油口106连接;第二液压缸206的有杆腔与集成控制阀的第三工作油口107连接,无杆腔与第四工作油口108连接;第三液压缸207的有杆腔与集成控制阀的第五工作油口109连接,无杆腔与第六工作油口110连接。
53.在该实施例中,第一液压缸205即为卸杆钳的摆动液压缸,第二液压缸206即为夹紧液压缸,第三液压缸207即为转动液压缸。
54.该液压系统,利用一个控制手柄204进行操控,实现了对现有的自动卸杆钳的稳定可靠的液压控制,从而让牙轮钻机实现快速卸杆,而且均是通过液压控制,较少了操作人员的危险。提高了卸杆效率,降低了卸杆危险,省时省力。
55.在本实用新型的优选实施例中,第一换向阀200和第二换向阀201均为三位四通y型比例方向阀,使得卸杆钳的运动速度可根据需求自由调节,在换向时,可以更加平稳安全,减少冲击。同时,对于三位四通y型比例换向阀,在换向阀不动作时,a口和b口均是与t口导通的,因此在液压缸被相应的液压锁锁住的时候,位于液压锁进油侧(v1口和v2口)的液压油不会对液压锁造成影响,从而在液压锁将液压缸锁定时更加稳定可靠,这也进一步地增加了液压系统的可靠性。
56.下面对利用本实用新型的实施例中所提供的液压系统控制过程进行说明。
57.向上操作控制手柄204,第一换向阀200的右侧电磁铁b得电,此时,第一换向阀200工作在右工作位,p口和a口导通,液压油经过第一液压锁111进入第一液压缸205的无杆腔,第一液压缸205伸出,使自动卸杆钳摆动至待卸钻杆附近。
58.向下操作控制手柄204,第一换向阀200的左侧电磁铁a得电,此时,第一换向阀200工作在左工作位,p口和b口导通,液压油经过第一液压锁111进入第一液压缸205的有杆腔,第一液压缸205缩回,使自动卸杆钳摆动至非工作位置。
59.向右操作控制手柄204,第二换向阀201的右侧电磁铁b得电,此时,第二换向阀201
工作在右工作位,p口和a口导通,液压油经过第二液压锁112进入第二液压缸206的无杆腔,第二液压缸206伸出;继续通液压油,集成控制阀的第二进油口102至第三工作油口107的液压油压力进一步升高,打开顺序阀113,液压油进入第三液压缸207的无杆腔,推动第三液压缸207伸出,使得旋转钳嘴将待卸钻杆卸开。
60.向左操作控制手柄204,第二换向阀201的左侧电磁铁a得电,此时,第二换向阀201工作在左工作位,p口和b口导通,液压油经过第二液压锁112分别进入第二液压缸206和第三液压缸207的有杆腔,两个液压缸同时缩回,带动钳嘴离开被卸钻杆。
61.通过上述方式,实现牙轮钻机的快速卸杆,并且效率高、危险性低、省时省力。
62.本实用新型的自动卸杆钳液压系统,不仅满足了自动卸杆钳的液压控制需求,而且因为利用了所提出的集成控制阀,更加稳定可靠,集成度高,并且利用一个控制手柄204操作,操作更加方便。
63.进一步地,在本实用新型的实施例中,还提供了一种牙轮钻机的卸杆钳,确切的说是一种自动卸杆钳,该自动卸杆钳利用了所提出的液压系统,在进行卸杆操作时,稳定可靠,使得牙轮钻机能够快速卸杆。
64.本实用新型的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。