1.本实用新型涉及半导体技术领域,特别涉及一种改进的真空吸附系统及化学机械研磨机。
背景技术:
2.化学机械研磨(chemical mechanical planarization,cmp)亦称化学机械抛光,是一种将化学腐蚀作用和机械去除作用相结合的加工技术,在半导体芯片制造过程中被广泛运用。通常,研磨头可包含能够具有负压的真空腔,以将晶圆吸附在研磨头的膜片(membrane,mm)表面进行研磨。真空腔内的负压可以通过例如研磨真空发生器利用来自气源的正压气体来产生。
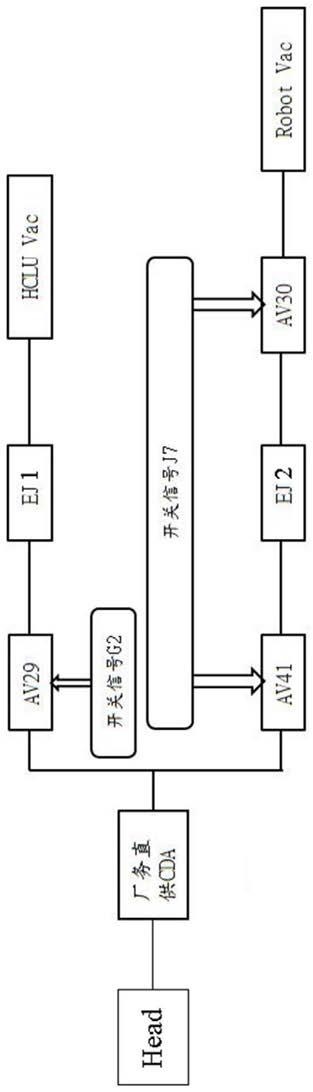
3.化学机械研磨过程中,晶圆在不同工序、不同系统间的搬运和转移可以通过机械手臂和晶圆暂存平台来实现。其中,机械手臂(robot)负责抓放晶圆,研磨头(head)和/或机械手臂可在晶圆暂存平台(hclu)对晶圆执行拾取/放置动作。现有技术中,机械手臂和晶圆暂存平台也可采用真空吸附的方式获取并保持晶圆。如图1和图2所示,化学机械研磨机台目前常见的原厂设计机械手臂和晶圆暂存平台可分别通过气动阀av29、av41来控制气源向真空发生器(ejector)ej1、ej2提供洁净干燥空气(cda)从而产生负压。由于研磨头与机械手臂和晶圆暂存平台均利用同一气源——即厂务直供洁净干燥空气,当研磨头与机械手臂和/或晶圆暂存平台同时使用时,在开启气动阀av29、av41以启动真空发生器ej1、ej2的瞬间,连接至气源的管路中的气压发生变化,极易造成因研磨头的真空腔内负压不稳而影响吸附效果,导致膜片因无法与晶圆很好地接触,甚至出现滑片现象——即晶圆从研磨头滑落,直至机台停止运行。
4.因此,如何避免因负压不稳而导致的滑片现象成为半导体生产领域亟待解决的技术问题。
技术实现要素:
5.为了解决现有的技术问题,本实用新型提供一种改进的真空吸附系统,在保留现有真空吸附系统原厂设计的基础上重新设计连接管路,有效减少滑片现象,提高产能。本实用新型同时提供一种包含该真空吸附系统的化学机械研磨机。
6.依据本实用新型,提供一种真空吸附系统,包含气源和连接至气源的研磨头,其中研磨头利用来自气源的空气所产生的负压来吸附晶圆,系统进一步包含:
7.真空发生器,真空发生器与气源直接流体连通并以常开状态产生稳定负压;
8.吸附装置,吸附装置通过阀门连接至真空发生器,阀门响应于开关信号选择性地流体连通真空发生器和吸附装置。
9.依据本实用新型的一个实施例,真空发生器包含第一真空发生器,吸附装置包含通过真空吸附抓取晶圆的机械手臂,其中机械手臂通过第一阀门连接至第一真空发生器。
10.依据本实用新型的一个实施例,真空发生器包含第二真空发生器,吸附装置包含
用于暂存和传输晶圆的晶圆暂存平台,其中晶圆暂存平台通过第二阀门连接至第二真空发生器。
11.依据本实用新型的一个实施例,真空吸附系统进一步包含研磨真空发生器,研磨真空发生器连接气源至研磨头,并设置为利用来自气源的空气产生负压。
12.依据本实用新型的一个实施例,研磨头包含真空腔,研磨真空发生器与真空腔流体连通。
13.依据本实用新型的一个实施例,气源为厂务直供的洁净干燥空气。
14.依据本实用新型的一个实施例,阀门为气动阀。
15.依据本实用新型,提供一种化学机械研磨机,包含上述真空吸附系统。
16.由于采用以上技术方案,本实用新型与现有技术相比具有如下优点:
17.1.依据本实用新型的真空吸附系统在现有的原厂设计的基础上重新设计连接管路,无需更换/新增部件,改造成本低;
18.2.依据本实用新型的真空吸附系统使真空发生器保持常开状态,进而稳定进入真空生成器的气流以及气源和真空发生器之间管路内的气压,避免因研磨头端与吸附装置端同时使用气源引起的负压不稳情况,有效减少滑片现象,提高产能。
附图说明
19.图1示出了传统真空吸附系统的示意图;
20.图2示出了传统真空吸附系统的连接线路图;
21.图3示出了依据本实用新型的真空吸附系统的示意图;
22.图4示出了依据本实用新型的真空吸附系统的连接线路图;
23.图5示出了使用传统真空吸附系统时监测的研磨头真空腔内的真空度变化曲线;
24.图6示出了使用依据本实用新型的真空吸附系统时监测的研磨头真空腔内的真空度变化曲线;
25.图7示出了对真空吸附系统进行改造前和改造后的研磨头有效生产时间的曲线图。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,下面结合实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
27.图3和图4分别示出了依据本实用新型的真空吸附系统的示意图和连接线路图。该真空吸附系统包含作为气源的厂务直供洁净干燥空气(cda)和连接至气源的研磨头,其中研磨头利用来自气源的空气所产生的负压来吸附晶圆。具体的,气源可连接至研磨真空发生器(未示出),并且研磨真空发生器进而可与研磨头的真空腔流体连通,以通过研磨真空发生器利用来自气源的正压气体在真空腔内产生负压,并对晶圆进行吸附。真空吸附系统进一步包含与气源直接流体连通并以常开状态产生稳定负压的真空发生器,以及通过阀门连接至真空发生器的吸附装置。其中,阀门可响应于开关信号选择性地流体连通真空发生器和吸附装置。
28.在本实用新型的示例中,吸附装置可以包含通过真空吸附抓取晶圆的机械手臂robot,以及与气源直接流体连通的第一真空发生器ej1。其中,第一真空发生器ej1通过第一阀门av29连接至机械手臂的真空腔robot vac。第一阀门av29优选为常闭阀门,可响应于接收到开关信号g2而开启,使得机械手臂的真空腔robot vac与连接第一真空发生器ej1端的真空管路连通并随之产生负压以吸附并抓放晶圆。
29.进一步地,吸附装置还可以包含用于暂存和传输晶圆的晶圆暂存平台hclu,以及与气源直接流体连通的第二真空发生器ej2。其中,第二真空发生器ej2通过第二阀门av30连接至晶圆暂存平台的真空腔hclu vac。第二阀门av30优选为常闭阀门,可响应于接收到开关信号j7而开启,使得圆暂存平台的真空腔hclu vac与连接第二真空发生器ej2端的真空管路连通并随之产生负压以保持并传输晶。
30.第一阀门av29和第二阀门av30可以是气动阀,或者其他类型的阀门。吸附装置也不仅限于如上所述的机械手臂robot和晶圆暂存平台hclu,本领域技术人员可依据实际工况增加其他吸附装置。
31.相比于图1和图2所示的原厂设计,改造后的真空吸附系统将原本安装于气源与第一真空发生器ej1之间的第一阀门av29改装至第一真空发生器ej1与机械手臂的真空腔robot vac之间;并且,移除原本安装于气源与第二真空发生器ej2之间的阀门av41,仅保留第二真空发生器ej2与晶圆暂存平台的真空腔hclu vac之间的第二阀门av30。由此,第一真空发生器ej1与第二真空发生器ej2保持常开状态,进而稳定进入第一真空发生器ej1、第二真空发生器ej2的气流,以及气源和第一真空发生器ej1、第二真空发生器ej2之间管路内的气压,避免因研磨头端与机械手臂robot端、晶圆暂存平台hclu端同时使用气源引起的负压不稳情况,有效减少滑片现象的发生。应当领会的是,“移除”原本安装于气源与第二真空发生器ej2之间的阀门av41,不仅仅限于真正的“移除”(例如拆卸),也可将阀门av41设置为常开状态并不再接收开关信号j7。由此可见,依据本实用新型而改造的真空吸附系统仅仅涉及部分连接管路的调整,并未改变/新增例如阀门、真空发生器等部件,并且各阀门与信号之间的对应关系也并未改变,极大程度地降低了改造成本。
32.图5和图6分别示出了改造前和改造后监测研磨头真空腔内的真空度的实时变化曲线。其中,x轴表示是时间,y轴表示研磨头真空腔内的气压对应的电压(6v对应于标准大气压,电压高/低则表示研磨头真空腔内的气压高/低)。如图所示,当表示研磨头真空腔内的气压的电压低于6v,即研磨头真空腔内的气压低于标准大气压,并趋于平稳时(参见图5和图6方框内的曲线),使用依据本实用新型的真空吸附系统的气压明显比改造前的气压。进一步地,图7示出了对真空吸附系统进行改造前和改造后的研磨头有效生产时间的曲线图。其中,x轴表示是时间(11w1表示11月第1周),y轴表示的up time为有效生产时间,例如,一天由24小时,up time为70%即表示有效生产时间为16.8小时。研磨头真空腔内的气压不稳产生滑片,进而导致机台停止运行严重影响有效生产时间的提高。如图所示,真空系统改造后(斜线以后)的有效生产时间普遍高于真空系统改造前(斜线以前)的有效生产时间,进而提高了产能。
33.以上实施例仅表达了本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用
新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。