1.本实用新型属于包装袋夹具技术领域,更具体地说,是涉及一种尤其适用于编织袋的旋转钩式夹具及抓取搬运装置。
背景技术:
2.在现有行业中,编织袋作为包装袋的一种,广泛用于工业生产的各个环节。但是,因为编织袋的制造材料薄且易变形,导致常用的吸盘载具无法吸取编织袋,而一般的传统夹具,其夹取编织袋时则容易产生晃动从而影响搬运。因此,目前工业生产领域的编织袋搬运一般都是采用人工搬运完成,而制造编织袋的物料一般都比较重,这就导致人工搬运编织袋劳动强度大、效率低。
3.综上所述,现有的夹具吸取编织袋时易变形、夹取编织袋时易晃动、而人工搬运编织袋劳动强度大、效率低,是本领域亟待解决的技术问题。
技术实现要素:
4.本实用新型为了解决现有的夹具吸取编织袋时易变形、夹取编织袋时易晃动、而人工搬运编织袋劳动强度大、效率低的技术问题,提出一种尤其适用于编织袋的旋转钩式夹具及抓取搬运装置。
5.为解决以上问题,本实用新型采用的技术方案是:提供一种旋转钩式夹具,包括:
6.安装架,其设有两个侧板,安装架用于与机器人固定连接;
7.可转动地连接于两个侧板之间的一对转轴,每个转轴上固定安装有至少一个抓钩,该对转轴的抓钩一一对应且位置相对,抓钩的末端外径逐渐缩小呈一尖端;
8.驱动装置,其用于驱动该对转轴反向转动,抓钩跟随转轴转动实现抓取或释放工件。
9.进一步地,驱动装置包括:设于一个侧板上的线性驱动机构,该线性驱动机构用于驱动一双面齿条线性运动;
10.该对转轴分别通过齿轮与双面齿条的两面对应啮合。
11.优选地,线性驱动机构包括:安装于侧板上的三轴气缸,由三轴气缸驱动伸缩的活塞杆,一运动件固定连接于活塞杆末端,双面齿条固定连接于运动件。
12.优选地,抓钩包括:连接部,该连接部设有用于与转轴相连接的轴孔;连接于连接部一端的抓取部,抓钩的末端为该抓取部的末端。
13.优选地,连接部呈圆柱形,连接部在相对抓取部的三面分别设有顶丝孔,通过顶丝顶入顶丝孔限制抓钩相对转轴转动。
14.优选地,抓取部呈一半圆弧状的弯钩。
15.进一步地,侧板安装有一护罩,该护罩与侧板之间形成将齿轮和双面齿条包裹于其中的容纳空间。
16.进一步地,转轴在抓钩两侧套设有用于限制抓钩滑动的锁紧环。
17.优选地,转轴的两端通过轴承座可转动地连接于一对侧板之间。
18.本实用新型还提供一种抓取搬运装置,包括机器人,还包括上述的旋转钩式夹具,一对侧板的对应顶端连接有一顶板,该顶板设有法兰盘,机器人的机械手与法兰盘固定连接;
19.当机器人感应到编织袋时,机器人控制线性驱动装置驱动抓钩抓取编织袋,由机械手搬运至指定位置机器人控制抓钩释放编织袋。
20.与现有技术相比,本实用新型提供的旋转钩式夹具及抓取搬运装置具有以下有益效果:本实用新型提供的气动旋转式夹具,以气缸作为动力,配合齿轮齿条的转向作用将气缸的上下运动转换成一对转轴的反向旋转运动,通过转轴带动各自一一对应设置的抓钩反向旋转,从而实现自动抓取、搬运及释放编织袋的功能。同时,该抓钩为形似弯曲带尖端的鱼钩,通过多对抓钩配合一对转轴反向旋转,可实现稳定抓取和释放编织袋,配合机器人作为载具实现编织袋的抓取搬运。
附图说明
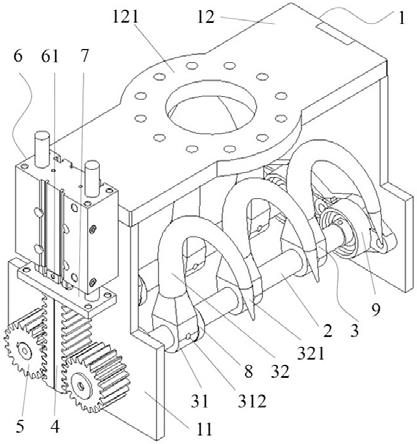
21.图1为本实用新型提供的旋转钩式夹具的一种实施例的整体装配结构示意图一;
22.图2为本实用新型提供的旋转钩式夹具的一种实施例的不带护罩的结构示意图二;
23.图3为本实用新型提供的旋转钩式夹具的一种实施例的整体装配结构示意图三;
24.图4为本实用新型提供的旋转钩式夹具的一种实施例的整体装配结构俯视图;
25.图5为本实用新型提供的旋转钩式夹具的一种实施例的抓钩的结构示意图。
26.其中,图中各附图主要标记如下:
[0027]1‑
安装架;11
‑
侧板;111
‑
护罩;12
‑
顶板;121
‑
法兰盘;2
‑
转轴;3
‑
抓钩;31
‑
连接部;311
‑
轴孔;312
‑
顶丝孔;32
‑
抓取部;321
‑
尖端;4
‑
双面齿条;5
‑
齿轮;6
‑
三轴气缸;61
‑
活塞杆;7
‑
运动件;8
‑
锁紧环;9
‑
轴承座。
具体实施方式
[0028]
为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图1
‑
5及实施例,对本实用新型进行进一步详细说明。
[0029]
请一并参阅图1
‑
5,本实用新型提供的旋转钩式夹具,包括:
[0030]
安装架1,该安装架1设有两个相对的侧板11,该安装架1用于与机器人固定连接。作为一种实施例,一对侧板11的对应顶端连接有一顶板12,该顶板12设有法兰盘121,安装架1通过法兰盘121与机器人的机械手的对应连接结构固定连接。
[0031]
在本实施例中,还包括可转动地连接于两个侧板11之间的一对转轴2,其中每个转轴2上固定安装有至少一个抓钩3,该对转轴2的抓钩3一一对应且安装位置相对,抓钩3的末端外径逐渐缩小呈一尖端321。作为一种实施例,抓钩3包括:连接部31,该连接部31设有用于与转轴2相连接的轴孔311;连接于连接部31远离轴孔311的一端的抓取部32,该抓取部32的末端即为抓钩3的末端。作为优选的实施方式,连接部31呈圆柱形,该圆柱形的中轴线即为轴孔311的中轴线;连接部31在相对抓取部32的三面(即相对与抓取部32的连接面的三面)分别设有顶丝孔312,通过顶丝顶入顶丝孔312,实现限制抓钩3绕转轴2的轴心线相对转
轴2转动,保证转轴2带动抓钩3旋转时抓钩3的稳定性。作为更优的实施方式,抓取部32呈一半圆弧状的弯钩,在每对抓取部32相扣合时,可以更顺畅地滑入并容纳编织袋因被夹持、抓取而产生变形的部分。
[0032]
本实施例中,还包括驱动装置,其用于驱动该对转轴2反向转动,从而使得该对转轴2对应设置的多对抓钩3跟随转轴2反向转动,以实现其抓取或释放工件的动作。作为优选的实施例,驱动装置包括:设于一个侧板11上的线性驱动机构,该线性驱动机构用于驱动一双面齿条4线性运动;该对转轴2分别通过各种末端设置的齿轮5与双面齿条4的两面对应啮合。作为一种实施方式,线性驱动机构包括:安装于侧板11上的三轴气缸6,由三轴气缸6驱动伸缩的活塞杆61,一运动件7(优选为一安装板)固定连接于活塞杆61末端,双面齿条4固定连接于运动件7。作为其它的实施方式,线性驱动机构的驱动单元也可以是通过双轴气缸或单轴气缸驱动其活塞杆61带动上述的运动件7。作为另一种实施例,线性驱动机构也可以利用电机驱动一主动轮,该主动轮带动上述的其中一个转轴2的齿轮5正转,再提过该齿轮5带动另一个转轴2的齿轮5反转。作为其它的实施例,线性驱动机构还可以通过两个同步反转的电机的各自齿轮5,分别带动上述的一对转轴2的齿轮5同步反转。
[0033]
作为优选的实施例,侧板11安装有一护罩111,该护罩111与侧板11之间形成将齿轮5和双面齿条4包裹于其中的容纳空间,以防止外界环境的水分或者扬尘对齿轮5齿条传动及零件寿命的影响。作为更优的实施例,转轴2在抓钩3的两侧套设有用于限制抓钩3沿转轴2的轴向滑动的锁紧环8,转轴2的两端通过轴承座9可转动地连接于一对侧板11之间。作为优选的实施方式,轴承座9为滚珠轴承座9。
[0034]
本实用新型还提供一种抓取搬运装置,包括机器人,还包括上述的旋转钩式夹具,机器人的机械手与法兰盘121固定连接。当机器人的传感器感应到编织袋时,传感器反馈信息给机器人的控制系统,机器人通过控制系统控制线性驱动装置通气,从而驱动抓钩3抓取编织袋,由机械手搬运至指定位置机器人控制抓钩3释放编织袋。
[0035]
在抓取编织袋时,旋转钩式夹具的线性驱动装置的一对转轴2反向旋转,从而带动多对抓钩3进行抓取编织袋的动作,每对抓钩3呈弯钩状的抓取部32的尖端321相扣合,从而将编织袋夹紧与多对抓钩3的抓取部32之间。利用间隔设置的多对抓取部32末端的尖端321一一对应地相扣合,实现对包装袋的夹紧及夹紧后的搬运,从而克服编织袋易变形、吸盘难以吸取和传统夹具难以夹持紧固的问题,避免人力搬运产生劳动强度,提高生产效率、降低生产成本。
[0036]
以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
