1.本实用新型的实施例涉及一种物流车,特别涉及一种机器人智能物流车。
背景技术:
2.在现有的物流行业中,均采用物流集装箱的形式进行装载,但是,从集装箱中先进行物品卸货,然后进行分拣,一般都采用人工的方式进行,随着物流行业智能化的发展,这种的模式不能满足要求,为了能够直接集装箱中进行工作,但是,按照现有的人工模式的话,在集装箱内工作不可取。
技术实现要素:
3.本实用新型的实施方式的目的在于提供一种智能分拣的机器人智能物流车,直接在集装箱内工作,替代人工,进行工作。
4.为了实现上述目的,本实用新型的实施方式设计了一种机器人智能物流车,其特征在于,包括:
5.框架,在所述的机器人智能物流车的底部设置所述的框架;
6.机器人,在所述的框架的上方固定所述的机器人;
7.履带行走部件,在所述的框架两侧,在所述的机器人的下方固定所述的履带行走部件,
8.传感器组件,在所述的框架的四周设置若干个所述的传感器组件;所述的传感器组件用于控制所述的机器人智能物流车行进的方向;
9.电源组件,在所述的框架的后侧固定所述的电源组件,所述的电源组件为所述的履带行走部件提供行走的动力;给所述的机器人提供电源;
10.控制柜,在所述的电源组件的上方固定所述的控制柜。
11.进一步,所述的框架呈方形结构;
12.所述的框架,还包括:
13.在所述的履带行走部件的上方设置防护板,防护板的一侧固定在所述的框架的边缘上。
14.进一步,所述的机器人的底座固定在所述的框架的上方的平面上;所述的机器人与所述的控制柜进行电气控制连接。
15.进一步,所述的履带行走部件为左右镜像对称设置,所述的履带行走部件,还包括:
16.驱动电机,在所述的履带行走部件的一侧固定驱动电机;
17.驱动齿轮,在驱动电机上固定驱动齿轮;在驱动齿轮上沿圆周设置驱动齿;
18.驱动链条,在驱动齿轮的外侧嵌入到驱动链条中;
19.履带,在驱动齿轮的外侧设置履带,履带固定在驱动链条的外侧;
20.惰轮,在所述的履带行走部件的后方设置惰轮;履带环绕在驱动齿轮和惰轮之间;
21.平衡轮,在惰轮和驱动齿轮之间,在所述的框架的侧面上固定若干个平衡轮。
22.进一步,所述的驱动电机为伺服电机,所述的伺服电机与所述的控制柜电性连接。
23.进一步,所述的传感器组件为测距传感器,将所述的传感器组件固定在所述的框架的四周,所述的传感器组件与所述的控制柜电性连接。
24.进一步,所述的测距传感器为发送反馈式红外线传感器,所述的测距传感器的测量的距离50
㎝‑
100cm。
25.进一步,所述的电源组件,包括:
26.若干个电池组组成所述的电源组件的直流部分,为所述的电源组件提供电能;
27.逆变器与电池组电性连接,逆变器将电池组上的直流电源逆变成交流电源,所述的逆变器为驱动电机、所述的机器人提供交流电。
28.进一步,所述的机器人智能物流车集装箱内物品的识别、抓取及堆叠。
29.本实用新型的实施方式同现有技术相比,设计了以机器人智能物流车的形式,进入集装箱体内进行工作以此来替代人工,在本实用新型中采用了机器人进行工作,同时,应用履带行走部件驱动机器人智能物流进行行进,实现全地形行走,满足不同集装箱内地面的行走。
附图说明
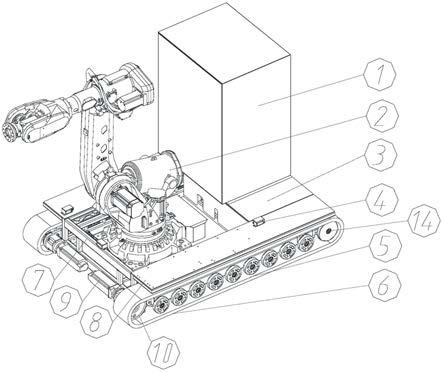
30.图1为本实用新型的结构示意图;
31.图2为本实用新型的履带行走部件的结构示意图;
32.图3为本实用新型的电路工作示意图。
具体实施方式
33.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
34.本实用新型的实施方式涉及一种机器人智能物流车,如图1和图2所示,包括:
35.在本实施例中的机器人智能物流车的底部设置框架7,框架7用于支撑机器人2、控制柜1,用于安装履带行走部件6;为此,在框架7的上方固定机器人2;机器人2用于物品的识别、抓取及堆叠的功能。
36.在框架7两侧,在机器人2的下方固定履带行走部件6,履带行走部件6通过驱动,可以实现前后左右的移动。
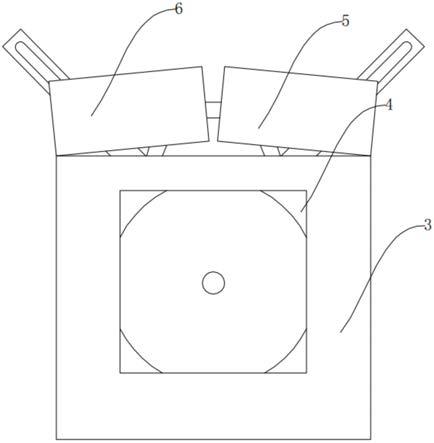
37.在框架7的四周设置若干个传感器组件4;传感器组件4用于控制本实施例中的机器人智能物流车行进的方向;通过传感器组件4的感应,能够识别前后左右的位置,这样保证本实施例中的机器人智能物流车能够避开前面的障碍物。
38.电源组件3,在框架7的后侧固定电源组件4,电源组件3为履带行走部件 6提供行走的动力;给机器人2提供电源;
39.控制柜1,在电源组件3的上方固定控制柜1。
40.上述的实施例中的机器人智能物流车,能够实现以机器人智能物流车的形式,进入集装箱体内进行工作以此来替代人工,采用了机器人进行工作,同时,应用履带行走部件驱动机器人智能物流进行行进,实现全地形行走,满足不同集装箱内地面的行走,解决了现有技术中,人工进入集装箱中的困境。
41.为了实现上述的技术效果,如图1和图2所示,框架7呈方形结构;
42.框架7,还包括:
43.在履带行走部件6的上方设置防护板8,防护板8的一侧固定在框架7的边缘上。这样,防护板8对于在履带行走部件6的上方进行了保护,起到保护履带行走部件6的上方的技术效果。
44.为了实现上述的技术效果,如图1和图2所示,机器人2的底座固定在框架 7的上方的平面上;机器人2与控制柜1进行电气控制连接。
45.履带行走部件6为左右镜像对称设置,履带行走部件6,如图1和图2所示,还包括:
46.在履带行走部件6的一侧固定驱动电机9;驱动电机9用于驱动驱动齿轮10 旋转,驱动电机9通过控制柜1给予控制,起到带动本实施例中的机器人智能物流车向前后左右的行走。
47.在驱动电机9上固定驱动齿轮10;在驱动齿轮10上沿圆周设置驱动齿11;驱动齿轮10的作用是通过驱动齿11带动驱动链条12旋转;驱动电机9带动驱动齿轮10旋转,通过通过驱动齿11带动驱动链条12旋转,从而带动履带13 旋转,从而带动本实施例中的机器人智能物流车向前后左右的行走。为此,驱动链条12,在驱动齿轮10的外侧嵌入到驱动链条12中;在驱动齿轮10的外侧设置履带13,履带13固定在驱动链条12的外侧;
48.在履带行走部件6的后方设置惰轮14;履带13环绕在驱动齿轮10和惰轮 14之间;惰轮14主要的作用使得驱动链条12形成一个环形作用,起到限制旋转方向的作用。
49.在惰轮14和驱动齿轮10之间,在框架7的侧面上固定若干个平衡轮15,平衡轮15的作用主要是起到限制驱动链条12的远动方向。上述的结构,形成了履带行走部件6的行走结构。
50.如图3所示,为了伺服电机9供电,实现对于在本实施例中的驱动电机9 为伺服电机,伺服电机9与控制柜1电性连接。
51.如图1和图2所示,在本实施例中的传感器组件4为测距传感器,将传感器组件4固定在框架7的四周,传感器组件7与控制柜1电性连接。测距传感器4 为发送反馈式红外线传感器,测距传感器4的测量的距离50
㎝‑
100cm。测距传感器4主要用于本实施例中的机器人智能物流车检测集装箱之间的距离,一旦测距传感器4发出信号,机器人智能物流车就能够避开集装箱的箱体
52.如图3所示,为了实现本实施例中的机器人智能物流车能够工作,电源组件3,包括:
53.若干个电池组17组成电源组件3的直流部分,为电源组件3提供电能;
54.逆变器16与电池组17电性连接,逆变器16将电池组17上的直流电源逆变成交流电源,逆变器16为驱动电机9、机器人2提供交流电。
55.在本实施例中的机器人智能物流车集装箱内物品的识别、抓取及堆叠。
56.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施
例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。