1.本发明涉及辅助拣选领域,具体来说,涉及一种智能投影辅助拣选工作站及其拣选方法。
背景技术:
2.拣选工作人员在工作站进行拣选时,需要根据电脑的电子单据如拣选sku,匹配货架上的条形码和商品条形码进行校验,并通过pda或者扫描枪进行条形码扫描检验后才能拣选货物,此模式的拣选作业造成拣选任务效率低下,错误率较高,agv机器人入站等待时间过长,造成智能仓库的拥堵和订单无法快速发运。
技术实现要素:
3.针对相关技术中的问题,本发明提出一种智能投影辅助拣选工作站及其拣选方法,以克服现有相关技术所存在的上述技术问题。
4.本发明的技术方案是这样实现的:
5.一种智能投影辅助拣选工作站,包括激光雷达、超短焦投影机、工控机、支架和货架,所述激光雷达与超短焦投影机固定在支架的顶壁上;
6.所述工控机设置在支架的顶面上,工控机与激光雷达与超短焦投影机组成拣选系统;
7.所述货架通过agv小车上的装配组件移动至支架拣选面,拣选系统对货架投影以及提醒。
8.进一步地,所述工控机通过hdmi线或者vga线与超短焦投影机相连,工控机在接收到agv小车的拣选指令后,投影指引的区域信息发送给超短焦投影机,超短焦投影机接收到工控机的指令后快速以闪耀的方式在货架形成区域投影,提醒拣选人员进行货物拣选;
9.所述激光雷达与工控机通过网线或其它数据线进行连接,激光雷达实时扫射拣选人员的拣选手势的位置,工控机通过逻辑运算和大数据分析,判断拣选人员的行为是否正确,并以视觉和语音方式来提醒拣选工作人员。
10.进一步地,所述超短焦投影机安装在距离支架正前方区域0.5m~0.8m,光源与支架垂直投射,激光雷达安装在支架正前面区域的正上方或者左右两角,与支架正前面区域垂直,通过高频率扫射支架正前面区域是否存在障碍物,并将障碍物的区域坐标实时伤发送给工控机。
11.进一步地,所述支架正前面区域被超短焦投影机设置成多个虚拟区域,虚拟区域入站的agv小车上的货架重叠,通过超短焦投影机将需要拣选的信息以数字、文字和图片的形式投射到货架的数字显示确认区上;
12.虚拟区域划分与入站的agv小车上的货架规格一致,货架是5层4列一共20个库位的规格,虚拟区域自动划分5层4列一共20个虚拟区域,并经工控机上传到后端进行保存。
13.进一步地,所述工控机需要与agv小车和激光雷达实时坐标进行运算和校验,工控
机和激光雷达进行的通信协议进行规范和统一,通信协议标准系统为pps
‑
sdk。
14.进一步地,所述装配组件包括车板、升降组件和伸缩组件,升降组件安装在车板上,伸缩组件与升降组件连接。
15.进一步地,所述升降组件包括滑轨、电机、丝杆、滑槽和齿条,滑槽对称沿车板的高度方向加工,齿条固定在滑槽的内壁上;
16.进一步地,所述电机安装在车板上,丝杆置于齿条另一侧的滑槽内,丝杆上啮合横板,横板上连接的齿轮与齿条啮合,横板上连接有升降平台,升降平台两侧通过滑块接入滑轨上。
17.进一步地,伸缩组件包括蜗杆、涡轮和抬身杆,蜗杆的一端贯穿齿轮的圆心,蜗杆的另一端穿入升降平台内与涡轮啮合,抬身杆贯穿升降平台,抬身杆上加工有与涡轮啮合的齿槽。
18.进一步地,agv小车7的顶部连接有气动伸缩头,气动伸缩头在agv小车7上伸缩,用于顶起货架6移动或者货架6下降放置,光栅分布在支架5的两侧,光栅用于感应操作者的手部是否在虚拟区域内。
19.上述技术方案具有如下优点或者有益效果:
20.1、本发明提供了一种智能投影辅助拣选工作站及其拣选方法,货架通过agv小车上的装配组件移动至支架内,拣选系统对货架投影以及提醒,非业务模式下,可触发节能模块将设备进行待机;agv小车进站或者人工触发模式可将设备唤醒并无缝对接,唤醒的时间速度达到0.05秒。
21.2、本发明提供了一种智能投影辅助拣选工作站及其拣选方法,采用单个动力输出,提供升降以及伸缩的动力,并且本发明将升降和伸缩结合在一起,抬身杆升降的同时完成抬身杆伸长或者缩短,能够有效的将货架驱动其下降时抬身杆的伸长,方便插入货架下方,抬身杆上升时,货架上升移动至agv小车上方,减少其占地面积。同时,通过这样设置,也提高了拣选效率。
22.3、本发明提供了一种智能投影辅助拣选工作站及其拣选方法,工控机转换成拣选指令并通过超短焦投影机将需要拣选的信息以数字、文字和图片的形式投射到指定的货架库位上,工作人员根据灯光和数量进行拣选,激光雷达可通过检测工作人员的手进行判断是否拿错货物,如拿错货物,通过红色闪耀和声音报警的方式提醒工作人员;正确取货时库位上变成绿色和正确图标提示;完成拣选可通过拍灭货架上的确认区域,完成本次拣选。智能投影辅助拣选工作站配合agv小车以及货架,完成具有灯光、数量、图文提示,视觉和语音的错误报警提示,实现快速、高效、具有防错功能的智慧性agv货到人拣选业务。较少agv小车以在工作站的停留时间,提供整个物流仓库的拣选效率。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1是根据本发明实施例的智能投影辅助拣选工作站的拣选立体图;
25.图2是根据本发明实施例的智能投影辅助拣选工作站的货架运输状态图;
26.图3是根据本发明实施例的智能投影辅助拣选工作站的装配组件正面结构图;
27.图4是根据本发明实施例的智能投影辅助拣选工作站的装配组件正面局部剖视结构图;
28.图5是根据本发明实施例的智能投影辅助拣选工作站的图4的a处放大图;
29.图6是根据本发明实施例的智能投影辅助拣选工作站的支架正视图;
30.图7是根据本发明实施例的智能投影辅助拣选工作站的系统结构图;
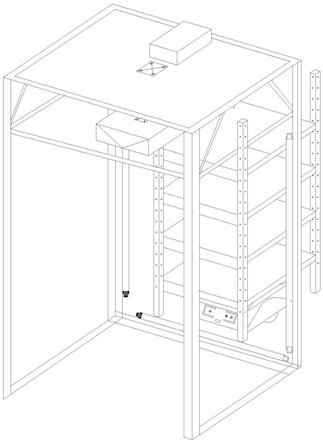
31.图8是根据本发明实施例的智能投影辅助拣选工作站的另一实施例立体图;
32.图9是根据本发明实施例的智能投影辅助拣选工作站的另一实施例正视图;
33.图10是根据本发明实施例的智能投影辅助拣选工作站的另一实施例背面图。
34.图中:1、激光雷达;2、超短焦投影机;3、工控机;5、支架;6、货架;7、agv小车;8、装配组件;81、车板;82、升降组件;821、滑轨;822、电机;823、丝杆;824、滑槽;825、齿条;826、横板;827、升降平台;83、伸缩组件;831、蜗杆;832、涡轮;833、抬身杆;9、齿轮;10、齿槽。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
36.实施例一
37.参阅附图1
‑
7所示一种智能投影辅助拣选工作站,包括激光雷达1、超短焦投影机2、工控机3、支架5和货架6,激光雷达1与超短焦投影机2固定在支架5的顶壁上,激光雷达1是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号激光束,然后将接收到的从目标反射回来的信号目标回波与发射信号进行比较,作数据处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到工控机3;
38.超短焦投影机2根据定义,超短焦投影机2是一种使用超广角镜头和小于0.4的投射比的设备。最大优点就是能够在短距离几十厘米或几厘米投射出大画面,只要安装在支架5上端即可,投影出虚拟区域、拣货数量及相关图片,其虚拟区域用于指明拣货区域和拣货数量。例如,所述超短焦投影机可采用nec np
‑
cu4300xd反射超短焦投影机、松下pt
‑
sgw420c超短焦投影仪等。工控机3设置在支架5的顶面上,工控机3与激光雷达1与超短焦投影机2组成拣选系统。
39.货架6通过agv小车7上的装配组件8移动至支架5内,拣选系统对货架6投影以及提醒,非业务模式下,可触发节能模块将设备进行待机;agv小车7进站或者人工触发模式可将设备唤醒并无缝对接,唤醒的时间速度达到0.05秒。
40.工控机3通过hdmi线或者vga线与超短焦投影机2相连,工控机3在接收到agv小车7的拣选指令后,投影指引的区域信息发送给超短焦投影机2,超短焦投影机2接收到工控机3
的指令后快速以闪耀的方式在货架6形成区域投影,提醒拣选人员进行货物拣选;
41.激光雷达1与工控机3通过网线或其它数据线进行连接,激光雷达1实时扫射拣选人员的拣选手势的位置,工控机3通过逻辑运算和大数据分析,判断拣选人员的行为是否正确,并以视觉和语音方式来提醒拣选工作人员。
42.超短焦投影机2安装在距离支架5正上方区域0.5m~0.8m,光源与支架5垂直投射,激光雷达1安装在支架5正前面区域的正上方或者左右两角,与支架5正前面区域垂直,通过高频率扫射支架5正前面区域是否存在障碍物,并将障碍物的区域坐标实时发送给工控机3。
43.支架5正前面区域被超短焦投影机2设置成多个虚拟区域,虚拟区域投影在入站的agv小车7上的货架6重叠,通过超短焦投影机2将需要拣选的信息以数字、文字和图片的形式投射到货架6的数字显示确认区上;
44.虚拟区域划分与入站的agv小车7上的货架6规格一致,agv小车7是5层4列一共20个库位的规格,虚拟区域自动划分5层4列一共20个虚拟区域,并经工控机3上传到后端进行保存。
45.工控机3需要与agv小车7和激光雷达1实时坐标进行运算和校验,工控机3和激光雷达1进行的通信协议进行规范和统一,通信协议标准系统为pps
‑
sdk。
46.装配组件8包括车板81、升降组件82和伸缩组件83,升降组件82安装在车板81上,伸缩组件83与升降组件82连接。
47.升降组件82包括滑轨821、电机822、丝杆823、滑槽824和齿条825,滑槽824对称沿车板81的高度方向加工,齿条825固定在滑槽824的内壁上;
48.电机822安装在车板81上,丝杆823置于齿条825另一侧的滑槽824内,丝杆823上啮合横板826,横板826上连接的齿轮9与齿条825啮合,横板826上连接有升降平台827,升降平台827两侧通过滑块接入滑轨821上,升降平台827沿着滑轨821起到上升或者下降,起到导向和支撑的作用,并且横板826在丝杆823旋转的过程中,进行上升或者下降,齿轮9会沿着齿条825移动,从而产生旋转。
49.伸缩组件83包括蜗杆831、涡轮832和抬身杆833,蜗杆831的一端贯穿齿轮9的圆心,齿轮9旋转可以带动蜗杆831旋转,蜗杆831的另一端穿入升降平台827内与涡轮832啮合,抬身杆833贯穿升降平台827,抬身杆833上加工有与涡轮832啮合的齿槽10,通过蜗杆831旋转带动抬身杆833往复移动,从而调整其位置。
50.采用单个动力输出,提供升降以及伸缩的动力,并且本发明将升降和伸缩结合在一起,抬身杆833升降的同时完成抬身杆833伸长或者缩短,能够有效的将货架6驱动其下降时抬身杆833的伸长,方便插入货架6下方,抬身杆833上升时,货架6上升移动至agv小车7上方,减少其占地面积。
51.工控机3转换成拣选指令并通过超短焦投影机2将需要拣选的信息以数字、文字和图片的形式投射到指定的货架6库位上,工作人员根据灯光和数量进行拣选,激光雷达1可通过检测工作人员的手进行判断是否拿错货物,如拿错货物,通过红色闪耀和声音报警的方式提醒工作人员;正确取货时库位上变成绿色和正确图标提示;完成拣选可通过拍灭货架6上的确认区域,完成本次拣选。智能投影辅助拣选工作站配合agv小车7以及货架6,完成具有灯光、数量、图文提示,视觉和语音的错误报警提示,实现快速、高效、具有防错功能的
智慧性agv货到人拣选业务。较少agv小车7以在工作站的停留时间,提供整个物流仓库的拣选效率。
52.本发明提出的另一种技术,包括智能投影辅助拣选工作站的拣选方法,包括以下步骤:
53.步骤一:agv小车7移动至货架6的前方,电机822接收信号工作,电机822驱动丝杆823旋转带动横板826下降;
54.步骤二:横板826下降则齿轮9沿着齿条825旋转,齿轮9将旋转的动力传递至蜗杆831,通过蜗杆831带动涡轮832旋转,涡轮832又与抬身杆833内齿槽10啮合,则抬身杆833沿着升降平台827内伸长;
55.步骤三:抬身杆833移动至货架6的下方,驱动装配组件8带动货架6上升移动至支架5的正前方的虚拟区域;
56.步骤四:装配组件8驱动抬身杆833下降的同时并伸长,将货架6放置到支架5的虚拟区域上,通过调整超短焦投影机2的投影区域与货架6的规格相同,并且每个货架6的储物空间内均与划分的虚拟区域一一对应;
57.步骤五:超短焦投影机2将货架6上投影的虚拟区域划分为拣选区和数字显示确认区,激光雷达1通过捕捉拣选人员的手势所在的位置,在无成像投影区域进行视觉和语音报警,在正确的虚拟区域拣选区,变成绿色成像投影,提示正确拣选货物,信息指示展示条通过工控机3上传数据发送到后端。
58.实施例二:
59.参阅附图8
‑
10,agv小车7的顶部连接有气动伸缩头,气动伸缩头在agv小车7上伸缩,用于顶起货架6移动或者货架6下降放置,光栅分布在支架5的两侧,光栅用于感应操作者的手部是否在虚拟区域内。
60.通过采用扁平状的agv小车7移动,并且在agv小车7移动至货架6的下方,气动伸缩头上升将货架6顶起,离开地面,agv小车7带动货架6移动至支架5的虚拟区域内,投影对准货架6的拣选面,完成投影。
61.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。