1.本实用新型涉及提落机领域,尤其涉及龙门四轴提落机。
背景技术:
2.在电力行业中,模组组装完毕后,需通电进行耐压测试,模组重量50kg,使用外部叉车搬运容易刮花模组表面钣金以及摆放过程中定位不准情况,考虑到生产效率和作业安全问题,设计龙门四轴提落机进行自动化搬运。
技术实现要素:
3.本实用新型提出一种高效、定位准确的龙门四轴提落机。
4.为实现上述目的,本实用新型采用以下技术方案:
5.龙门四轴提落机,其包括龙门架,龙门架的顶部设有x轴滑动机构,x轴滑动机构上设有由其驱动沿x轴方向运动的x轴滑座,所述x轴滑座上连接有y轴滑动机构,y轴滑动机构上连接有由其驱动沿y轴方向运动的y轴滑座,y轴滑座上设有z轴滑动机构,z轴滑动机构上连接有由其驱动沿z轴方向运动的z轴滑柱,所述z轴滑柱的底部转动连接有抓手机构,该抓手机构由旋转电机驱动旋转;所述抓手机构包括顶板,顶板的底部连接有两个夹板,两个夹板由夹持驱动机构带动做夹紧或松开动作。
6.进一步的,所述顶板的底部两侧固定有两个平行设置的抓手导轨,两个夹板的顶部分别滑动连接于对应侧的抓手导轨上,所述顶板的底部中心处转动连接抓手齿轮,两个夹板的顶部分别固定有抓手齿条,且两个抓手齿条分别位于抓手齿轮的两侧,两抓手齿条分别与抓手齿轮啮合,所述顶板的底部设有抓手气缸,该抓手气缸与其中一个固定连接并推动其移动。
7.进一步的,所述x轴滑动机构和y轴滑动机构均为由伺服电机驱动的丝杆螺母副;所述z轴滑动机构包括z轴固定座,z轴固定座的侧壁上固定有z轴电机,z轴电机上固定有z轴齿轮,所述z轴滑柱上固定有沿竖直方向设置的升降齿条,该升降齿条与z轴齿轮啮合,所述z轴滑柱上固定有沿竖直方向设置的升降导轨,该升降导轨与z轴固定座上的滑块滑动配合。
8.进一步的,所述旋转电机通过齿轮传动副带动抓手机构旋转。
9.进一步的,所述夹板的下部两侧分别固定有抓手提块,两个抓手提块之间固定有抓手软垫。
10.本实用新型采用四轴提落机实现自动化搬运测试模组,可以实现精确地抓取和摆放测试模组,不会刮花测试模组表面的钣金,同时生产效率高,作业安全。
附图说明
11.以下结合附图和具体实施方式对本实用新型做进一步详细说明;
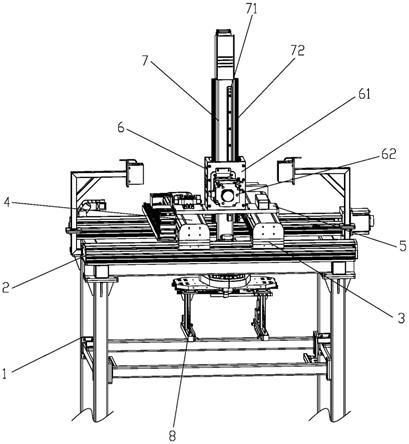
12.图1为本实用新型的结构示意图;
13.图2为抓手机构的示意图。
具体实施方式
14.如图1
‑
2所示,本实用新型龙门四轴提落机,其包括龙门架1,龙门架1的顶部设有x轴滑动机构2,x轴滑动机构2上设有由其驱动沿x轴方向运动的x轴滑座3,所述x轴滑座3上连接有y轴滑动机构4,y轴滑动机构4上连接有由其驱动沿y轴方向运动的y轴滑座5,y轴滑座5上设有z轴滑动机构6,z轴滑动机构6上连接有由其驱动沿z轴方向运动的z轴滑柱7,所述z轴滑柱7的底部转动连接有抓手机构8,该抓手机构8由旋转电机驱动旋转,旋转电机通过齿轮传动副带动抓手机构8旋转;所述抓手机构8包括顶板81,顶板81的底部连接有两个夹板82,两个夹板82由夹持驱动机构带动做夹紧或松开动作。
15.本实用新型中,x轴和y轴是在水平面内两个相互垂直的轴系,z轴是沿着竖直方向设置的轴系。
16.所述顶板81的底部两侧固定有两个平行设置的抓手导轨,两个夹板82的顶部分别滑动连接于对应侧的抓手导轨上,所述顶板81的底部中心处转动连接抓手齿轮83,两个夹板82的顶部分别固定有抓手齿条84,且两个抓手齿条84分别位于抓手齿轮83的两侧,两抓手齿条84分别与抓手齿轮83啮合,所述顶板81的底部设有抓手气缸,该抓手气缸与其中一个固定连接并推动其移动,在抓手齿轮83和两个抓手齿条84的配合下,可以实现两个夹板82同步相互靠近运动或相互远离运动,从而达到抓手紧和松开的动作。其中,夹板82的下部两侧分别固定有抓手提块85,通过抓手提块85插入测试模组对应的镂空孔中,能够有效可靠的抓取测试模组。同时,在两个抓手提块85之间固定有抓手软垫86,避免夹伤测试模组。
17.为了实现准确抓取测试模组, x轴滑动机构2和y轴滑动机构4采用由伺服电机驱动的丝杆螺母副,以保证定位精度。
18.而抓手机构8在竖直方向(z轴)的精度要求相对低些,为了节省设备成本,采用以下方式,z轴滑动机构6包括z轴固定座61,z轴固定座61的侧壁上固定有z轴电机62,z轴电机62上固定有z轴齿轮,所述z轴滑柱7上固定有沿竖直方向设置的升降齿条71,该升降齿条71与z轴齿轮啮合,所述z轴滑柱7上固定有沿竖直方向设置的升降导轨72,该升降导轨72与z轴固定座61上的滑块滑动配合。
19.本实用新型中,x轴滑动机构2和y轴滑动机构4带动抓手机构8在水平面移动,z轴滑动机构6带动抓手机构8做升降运动,旋转电机带动抓手机构8旋转,从而使得抓手机构8能够四轴运动,能够精确地抓取和摆放测试模组,不会刮花测试模组表面的钣金,实现自动化搬运测试模组,生产效率高,作业安全。
20.上面结合附图对本实用新型的实施加以描述,但是本实用新型不局限于上述的具体实施方式,上述的具体实施方式是示意性而不是加以局限本实用新型,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
技术特征:
1.龙门四轴提落机,其特征在于:其包括龙门架,龙门架的顶部设有x轴滑动机构,x轴滑动机构上设有由其驱动沿x轴方向运动的x轴滑座,所述x轴滑座上连接有y轴滑动机构,y轴滑动机构上连接有由其驱动沿y轴方向运动的y轴滑座,y轴滑座上设有z轴滑动机构,z轴滑动机构上连接有由其驱动沿z轴方向运动的z轴滑柱,所述z轴滑柱的底部转动连接有抓手机构,该抓手机构由旋转电机驱动旋转;所述抓手机构包括顶板,顶板的底部连接有两个夹板,两个夹板由夹持驱动机构带动做夹紧或松开动作。2.根据权利要求1所述的龙门四轴提落机,其特征在于:所述顶板的底部两侧固定有两个平行设置的抓手导轨,两个夹板的顶部分别滑动连接于对应侧的抓手导轨上,所述顶板的底部中心处转动连接抓手齿轮,两个夹板的顶部分别固定有抓手齿条,且两个抓手齿条分别位于抓手齿轮的两侧,两抓手齿条分别与抓手齿轮啮合,所述顶板的底部设有抓手气缸,该抓手气缸与其中一个固定连接并推动其移动。3.根据权利要求1所述的龙门四轴提落机,其特征在于:所述x轴滑动机构和y轴滑动机构均为由伺服电机驱动的丝杆螺母副;所述z轴滑动机构包括z轴固定座,z轴固定座的侧壁上固定有z轴电机,z轴电机上固定有z轴齿轮,所述z轴滑柱上固定有沿竖直方向设置的升降齿条,该升降齿条与z轴齿轮啮合,所述z轴滑柱上固定有沿竖直方向设置的升降导轨,该升降导轨与z轴固定座上的滑块滑动配合。4.根据权利要求1所述的龙门四轴提落机,其特征在于:所述旋转电机通过齿轮传动副带动抓手机构旋转。5.根据权利要求1所述的龙门四轴提落机,其特征在于:所述夹板的下部两侧分别固定有抓手提块,两个抓手提块之间固定有抓手软垫。
技术总结
本实用新型公开龙门四轴提落机,其包括龙门架,龙门架的顶部设有X轴滑动机构,X轴滑动机构上设有由其驱动沿X轴方向运动的X轴滑座,所述X轴滑座上连接有Y轴滑动机构,Y轴滑动机构上连接有由其驱动沿Y轴方向运动的Y轴滑座,Y轴滑座上设有Z轴滑动机构,Z轴滑动机构上连接有由其驱动沿Z轴方向运动的Z轴滑柱,所述Z轴滑柱的底部转动连接有抓手机构,该抓手机构由旋转电机驱动旋转;所述抓手机构包括顶板,顶板的底部连接有两个夹板,两个夹板由夹持驱动机构带动做夹紧或松开动作。本实用新型采用四轴提落机实现自动化搬运测试模组,可以实现精确地抓取和摆放测试模组,不会刮花测试模组表面的钣金,同时生产效率高,作业安全。作业安全。作业安全。
技术研发人员:凌传荣 翁伟 吴直福 游理辉 胡建生 蔡万强 吴运文 林先汝
受保护的技术使用者:福建渃博特自动化设备有限公司
技术研发日:2021.07.29
技术公布日:2021/12/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。