可自动跟随的助行辅具
1.1、技术领域
2.本实用新型涉及一种老年人进行行走锻炼时可以自动跟随保护防止跌倒摔伤的助行辅具,尤其涉及一种行走不便的老年人在进行行走锻炼时自动跟随提供保护防止跌倒摔伤的助行辅具。
3.2、
背景技术:
4.目前,公知的老年看护中,尤其是养老机构中,老年人跌倒、摔伤已经是一个多发的事故,在很多养老机构中,为了防止老年人在行走过程中发生跌倒摔伤事故,越来越多地安排老年人进行坐位的活动,越来越少地安排老年人行走锻炼。减少老年人行走锻炼直接的危害是老年人的心肺功能下降,下肢肌力减弱,身体素质整体下降,从而,大大缩短老年人的寿命。传统的解决老年人行走防摔倒方法是采用人工方式由亲属或护工在老年人身后抓住老年人的腰带以防止老年人在行走过程中摔倒。这一解决方案有两个弊端,一是需要占用一个人力陪伴老年人,可能会因为人力不足而导致无法实现;二是老年人本身已经是行走不便,如果再有人在身后抓住会导致老年人无法正常地自由地行走。现在的助行车通常会考虑到便携必须轻量化,因而不具备摔倒防护的功能。如果要有摔倒保护功能,车架必然需要有足够的强度,车架也必然会沉重,显然这不利于行动不便的老年人带车行走。
5.3、
技术实现要素:
6.为了解决上述问题,本实用新型提供了一种辅助行走器具,其目的在于,提供一种可以让老年人自由行走、不需他人照顾、跌倒时有保护的助行辅具。可以克服现有的老年人因为惧怕跌倒而越来越少地进行行走锻炼,以及由此带来的心肺功能下降、下肢肌力减弱、身体素质整体下降,从而,大大缩短老年人的寿命这一弊端。本实用新型能够为行走中的老年人提供安全的保护,同时还不会对行动不便的老年人的行走造成任何妨碍,使老年人没有任何行走负担、没有任何负重、没有任何拖累地自由自在地行走。
7.为实现上述目的,本实用新型提供的助行辅具是具有自动跟随功能的,使老年人可以独自一人安全行走,这是本实用新型的创新点。这样的具有自动跟随功能的助行辅具是这样实现的:一个可以识别人体行走动作的激光雷达装载于一个钢制车架的保护车(助行辅具)上,助行辅具上装有两个电机直接驱动的车轮,行走者的身上固定有防护腰带,防护腰带的有两条防护拉带通过登山专用防护锁扣与钢制车架联接在一起。当行走的人在车的框架内行走时,激光实时捕捉行走者的脚部动作,并将捕捉到的信息送到数据处理主机中进行运算识别,处理器根据行走者的足部位置和速度分别计算出助行辅具两个驱动轮的转动速度和转动距离并驱使助行辅具自动跟随行走者的脚移动,自动跟随行走者行走。
8.行走者在行走时穿着防护腰带,腰带通过高空作业用的保护绳索与助行辅具的车架相联。行走者在正常行走时,保护绳索是松懈的,行走者不会拉着车体行走,行走者始终是处于自由自在的行走。如果行走者在行走时万一跌倒,挂在车架上的保护绳索及保护腰带会拉住行走者,防止行走者跌倒时摔伤。
9.本实用新型的创新点在于自动跟踪,由于采用自动跟踪的助行辅具设计,从而可以得到以下有益效果:在行走者进行行走训锻练时,助行辅具可以自动地跟踪行走者,给予
行走者持续不断地保护,同时又不会对行走者的行走造成任何妨碍,可以保证行走者随心所欲地按照自己日常习惯进行行走锻炼,并且,在行走者一旦摔倒时提供保护,不会让行走者跌倒在地造成摔伤。
10.4、附图说明
11.以下结合附图对本发明/实用新型做进一步详细描述。
12.附图1是自动跟踪系统的机电控制结构参考图,
13.附图2是本发明/实用新型电气原理图,
14.附图3是本发明/实用新型的一种实体车型。
15.附图4是本发明/实用新型保护腰带的示意图,
16.附图5是本发明/实用新型具体应用,
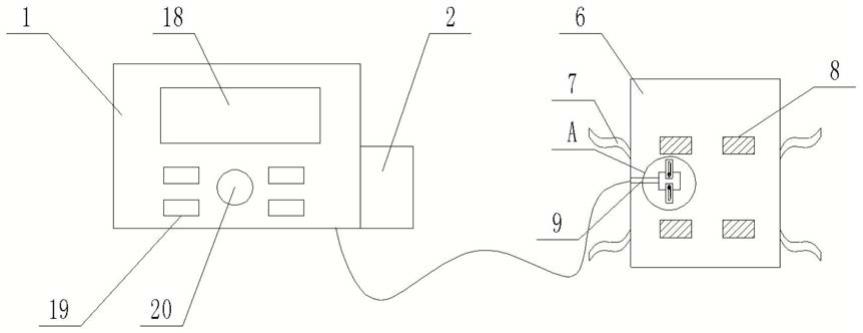
17.5、具体实施方式
18.如图1、图2、图3、图4和图5所示,本发明/实用新型的优选实施方式是:
19.在行走者行走的过程中,本助行辅具会自动跟随行走者,不管行走者是直行还是转弯,也不管行走者是慢走还是快步走,助行辅具都能自动跟随行走者。
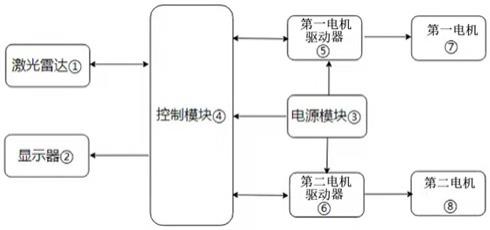
20.整个助行辅具是由激光雷达(1)、控制系统(4)、电源模块(3)、钢制车架(12)、电机车轮(9)(10)、显示系统(2)、防护腰带(13)等组成。
21.激光雷达
①
进行360度扫描获得周围环境的点云数据。激光雷达
①
通过数据总线与控制模块
④
连接并将点云数据发送给控制模块。
22.液晶显示屏
②
可显示行走速度、行走距离、行走步数、行走步幅等信息。液晶显示器
②
通过数据总线与控制模块
④
连接,接收控制模块
④
的显示数据。
23.电源模块
③
是一个24伏锂电池模块,为助行辅具自行提供动力。
24.控制模块
④
是助行辅具的数据处理中心。控制模块
④
通过数据总线与激光雷达
①
连接并接收激光雷达
①
的点云数据,控制模块
④
根据点云数据计算出行走者足部在助行辅具中的相对位置和相对助行辅具的移动速度,根据足部位置和速度数据分别计算出左右两个驱动轮(10)需要的转速和转动距离并将转速和转动距离数据分别发送给第一电机驱动器
⑤
和第二电机驱动器
⑥
,第一电机驱动器
⑤
和第二电机驱动器
⑥
通过第一电机
⑦
和第二电机
⑧
带动第一电机车轮(9)和第二电机车轮(10)跟随行走者移动。控制模块
④
通过数据总线与液晶显示屏
②
连接并将行走者的行走速度、行走距离、行走步数、行走步幅等信息发送给液晶显示屏
②
实时显示。
25.助行辅具有第一电机
⑦
和第二电机
⑧
分别安装在第一车轮(9)和第二车轮(10)的轮毂内,第一电机
⑦
和第二电机
⑧
分别带动第一车轮(9)和第二车轮(10)驱动助行辅具跟随行走者行走。第一电机
⑦
和第二电机
⑧
分别受第一电机驱动器
⑤
和第二电机驱动器
⑥
控制。第一电机驱动器
⑤
和第二电机驱动器
⑥
输入端通过数据总线与控制模块
④
连接,接收控制模块
④
的速度指令和转动距离指令。第一电机驱动器
⑤
和第二电机驱动器
⑥
根据控制模块
④
的指令驱动第一电机
⑦
和第二电机
⑧
,最终通过带动第一车轮(9)和第二车轮(10)来推动助行辅具前进。
26.行走者身穿防护腰带(13),防护腰带通过保护绳索与钢车架(12)连接。行走者行走时,助行辅具在自动跟踪系统的控制下自动跟随行走者提供保护,当行走者万一跌倒,防护腰带及保护绳索会将跌倒的行走者拉住,使其不会摔倒在地上,不会发生跌倒摔伤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。