1.本实用新型涉及机器人领域,具体为一种核电站水下运维机器人。
背景技术:
2.目前,针对水下机器人,国内外已有部分研究。例如,wood等开发了水下履带式考古机器人rosco。rosco是一款高性能远程操作水下履带式机器人,能够承担多种水下考古挖掘项目,具备回收海底垃圾和贵重物品的功能;能在深达90m的沿海水域中运行并适应不同的水下地形,可以搭载各种传感器。wood等还研制了海底回收履带车的三代改型rg
‑
iii。rg
‑
iii具有浮力升降系统,通过浮力控制系统可以实时调节气囊大小,从而调整机器人水下浮力进行浮沉。rg
‑
iii既可以采用履带式底盘在海底爬行,又可以通过调节气囊大小及安装的四个推进器来在水下“飞行”,从而越过沉船、飞跃珊瑚礁等敏感区域。
3.日本jamstec的tomoya等研发了水下小型履带式机器人abismo,多次在马里亚纳海沟进行取样作业。inoue等研发小型四摆臂履带式水下爬行机器人,通过摆臂可以调整机器人的行走姿态,提高了在软沉积物、斜坡和起伏等复杂地形的运动能力;在平坦地形上可以将履带臂收起来,提高了空间利用率。
4.日本日立研究所的mori等设计了具备浮游、底板爬行和爬侧壁三种功能的水下机器人。巴西南圣保罗联邦大学的ferreira等设计了浮游
‑
爬行式水下机器人,进行浮式液化天然气生产储卸装置的检测,机器人使用超声波传感器来检测结构中的裂缝及位置。澳大利亚的rovinnovations公司设计了浮游
‑
爬行式的混合动力水下机器人,机器人空气中质量为135kg,采用聚丙烯框架和不锈钢为主材,在履带式模式下能产生1000n的推力,速度能达到1.5m/s,而在浮游模式下具备460n的推力,速度能达到1m/s。澳大利亚nexis公司研制了一款水下履带式磁性机器人micromag。micromag具备强大的磁性底盘,可以在垂直或者水平倒置的黑色金属表面爬行作业。
5.另一方面,核电水池主要用于存储、冷却堆芯燃料。在核电站典型事故中,核电水池泄漏是比较常见的事故之一,对于核电水池的紧急修复作业更是世界性难题。另外,在核电站的日常生产中,大约每隔18到24个月就需要换料一次,每次移出的燃料棒都会带有较高的剩余衰变热,因此要通过毗邻的乏燃料池进行冷却。当乏燃料池发生漏水时,将会导致放射性物质外泄,造成核事故。换料水池包括核反应堆水池与核燃料水池,主要是核反应堆的燃料存放。一旦发生泄漏事故,同样会造成放射性物质外泄。
6.以往乏燃料水池和换料水池(以下均简称为水池)一旦发生池底或侧壁泄漏,需要抽干水池中的水,采用人工补漏作业,这会影响核电站正常运行和安全,耗时长、耗能大,损失以亿元计。此外,为了及时发现泄漏,核电站水池需要经常巡检,通常也是由人工完成,其高温、高湿、存在辐射的恶劣环境对作业工人的健康产生很大影响。
7.针对核电站水下环境的特点,现有的水下机器人存在一定的局限性。为此,本技术提供一种核电站水下运维机器人,以解决上述问题。
技术实现要素:
8.本实用新型的发明目的在于:针对现有的水下机器人主要针对通常水下环境,无法满足核电站水下环境应用需求的问题,提供一种核电站水下运维机器人。本技术的核电站水下运维机器人作为一种新型载具平台,其构思巧妙、设计合理,不设置单独的转向部件,而是通过其内各部件的配合,实现相应的悬浮、升降、翻转、转弯操作,其结构合理、可靠性高、能够满足核电站水下环境的工作需要,具有较高的应用价值。
9.为了实现上述目的,本技术采用如下技术方案:
10.一种核电站水下运维机器人,包括工作单元、连接线缆、自动收放线装置、控制系统;
11.所述工作单元包括运维车体、驱动组件、浮力块、悬浮推进器、水下推进器;
12.单组驱动组件由一个麦克拉姆轮和一个驱动电机构成;所述驱动电机设置在运维车体底端且运维车体能为驱动电机提供支撑,所述驱动电机的输出轴与麦克拉姆轮相连且驱动电机能带动麦克拉姆轮转动;
13.所述驱动组件为四组,所述驱动组件均布于运维车体上且通过控制驱动组件内麦克拉姆轮的转速能实现运维车体的直线或转向运动;
14.所述浮力块与运维车体相连且浮力块能实现工作单元整体浮力的调节;
15.所述悬浮推进器为四个,所述悬浮推进器均布于运维车体上且所述悬浮推进器能带动运维车体沿垂直于麦克拉姆轮运动方向的平面运动;
16.所述水下推进器为至少两个,所述水下推进器设置在运维车体的顶端且水下推进器能带动运维车体沿平行于其所在平面的方向运动;
17.所述工作单元通过连接线缆与自动收放线装置相连且连接线缆能为工作单元提供供电、通信功能;
18.所述驱动电机、悬浮推进器、水下推进器依次通过连接线缆、自动收放线装置分别与控制系统相连。
19.所述自动收放线装置与控制系统之间的信号传递采用有线传输或无线传输的方式。
20.所述浮力块为一组且浮力块对称设置在运维车体上。
21.所述浮力块与运维车体之间采用可拆卸连接。
22.所述悬浮推进器的喷射方向与水下推进器的喷射方向相垂直。
23.所述麦克拉姆轮能带动运维车体沿平行于运维车体所在平面的方向运动,所述悬浮推进器能带动运维车体沿垂直于其所在平面的方向运动。
24.所述水下推进器为两个且水下推进器平行设置在运维车体顶端。
25.还包括感知传感器、云台摄像头,所述感知传感器、云台摄像头分别设置在运维车体上,所述感知传感器、云台摄像头分别与控制系统相连。
26.所述感知传感器为两个,一个云台摄像头设置在运维车体的一端,另一个云台摄像头设置在运维车体的另一端。
27.还包括设置在运维车体上的检测工装,所述检测工装与控制系统相连。
28.所述检测工装为焊缝检测器。
29.随着机器人技术的不断成熟,使得利用水下机器人完成核电水池的作业任务成为
可能。为此,本技术提供一种核电站水下运维机器人。采用本技术,无需抽干水池内的水,其能在不影响核电站正常运行的状态下,通过搭载相应的操作部件,高效率完成对水池的焊接堵漏、巡查潜在裂纹、清洁壁面等工作。采用本技术的核电站水下运维机器人完成核电水池的日常巡检与紧急维护,不仅能避免因停产带来的经济损失,还能把人从恶劣、有害的工作环境中解放出来,具有巨大的经济效益和社会效益。同时,本技术的构思巧妙、设计合理,能够适应核电水池环境复杂的特点,且其具备灵活的运动性能与稳定的作业性能。本技术的核电站水下运维机器人作为一种适用于核电站水下环境的应用平台,其对于促进核电站的发展,保障工作人员的身体健康,降低核电站因停止运行所带来的经济损失,具有较高的应用价值。
附图说明
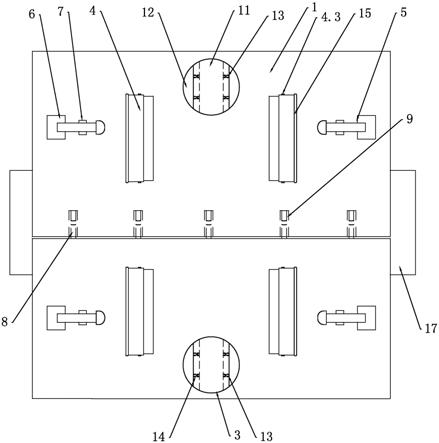
30.图1为实施例1中核电站水下运维机器人的工作单元结构示意图。
31.图中标记:1、运维车体,2、浮力块,3、悬浮推进器,4、水下推进器,5、麦克拉姆轮。
具体实施方式
32.下面结合附图,对本实用新型作详细的说明。
33.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
34.实施例1
35.如图所示,本实施例提供一种核电站水下运维机器人,其包括工作单元、连接线缆、自动收放线装置、控制系统。
36.本实施例中,工作单元作为主体,用于实现相应的悬浮、升降、翻转、转弯操作。其中,工作单元包括运维车体、驱动组件、浮力块、悬浮推进器、水下推进器。
37.本实施例中,驱动组件由一个麦克拉姆轮和一个驱动电机构成。其中,驱动电机设置在运维车体底端,且运维车体能为驱动电机提供支撑;驱动电机的输出轴与麦克拉姆轮相连,且驱动电机能带动麦克拉姆轮转动。本实施例中,驱动组件为四组,驱动组件均布于运维车体上,且驱动组件呈矩形布置。
38.同时,浮力块与运维车体相连。本实施例中,浮力块为一组,且浮力块对称设置在运维车体上,浮力块与运维车体之间采用可拆卸连接。
39.本实施例中,悬浮推进器为四个,水下推进器为两个。悬浮推进器均布于运维车体上,且悬浮推进器位于麦克拉姆轮上方;水下推进器平行设置在运维车体的顶端。该结构中,麦克拉姆轮带动运维车体沿其机身方向运动,水下推进器带动运维车体沿其机身方向运动;悬浮推进器能带动运维车体沿垂直于麦克拉姆轮运动方向的平面运动;即悬浮推进器的喷射方向与水下推进器的喷射方向相垂直。
40.本实施例中,工作单元通过连接线缆与自动收放线装置相连,且连接线缆能为工作单元提供供电、通信功能。驱动电机、悬浮推进器、水下推进器依次通过连接线缆、自动收放线装置分别与控制系统相连。采用该方式,可实现对驱动电机、悬浮推进器、水下推进器的远程操作,进而完成相应的检测等工作。进一步,自动收放线装置与控制系统之间的信号
传递,可采用有线传输或无线传输的方式。本实施例中,运维车体尾部通过连接线缆与自动收放线装置进行连接,实现数据传输和电力传输两种功能,在运维车体发生故障时,可通过自动收放线装置寻回。
41.在进行作业时,自动收放线装置整体独立于运维车体,并放置于水池上方,自动收放线装置采用多芯线缆与运维车体连接,通过连接线缆实现运维车体与自动收放线装置之间的数据传输和电力传输。为防止连接线缆被拉坏或放线过长,在排线端头增加了线缆张紧度检测系统,拉力过大或拉力过小时,收放线电机均能减速收放线或者停止收放线。为防止线缆收放时发生缠绕扭曲,保持通讯信号的通畅,采用电
‑
信号滑环连接线缆固定端和旋转端,既能防止线缆缠绕,同时还能确保线缆功能正常。
42.本实施例中,运维车体两侧搭载浮力块,用于在水中平衡其自身的重量,方便用较小的驱动力就实现核电站水下运维机器人的运动。本实施例中,运维车体的四周布置有4个悬浮推进器,用于实现运维车体在水中的悬浮、升降和90
°
翻转,四个悬浮推进器由单独的电机进行驱动控制。运维车体的两侧布置有2个水平安装的水下推进器,用于实现载具在水中的前进、后退和转弯等功能。运维车体的底部采用4组麦克纳姆轮驱动,可实现运维车体在池底或池壁任意方向的运动和转向。具体地,通过控制驱动组件内麦克拉姆轮的转速;当运维车体两侧麦克拉姆轮转速相同时,运维车体沿直线方向前进或后退;当运维车体两侧的麦克拉姆轮转速不同时,运维车体发生相应的转向运动。
43.本实施例中,通过悬浮推进器、水下推进器能推动运维车体实现水中任意方向的运动。当运维车体运动到水池底部或水池池壁时,就需要电机驱动四个麦克阿姆轮实现运维车体在池底与池壁全方位的运动。悬浮推进器中的电机、水下推进器中的电机与驱动电机选用直流电机,对于直流电机的驱动选用mosfet管搭建h桥驱动或三相驱动实现转速控制和位置控制。
44.该装置的工作过程如下:
45.(1)悬浮推进器工作,能使运维车体在水池内沿竖直方向移动;
46.(2)当需要由池内向池底运动时,四个悬浮推进器同时向下方推进,当运维车体与池底贴合时,悬浮推进器提供向下的压力,保证运维车体与池底贴合;此时,驱动组件工作,带动运维车体在池底按设定要求移动;当池底工作完成后,四个悬浮推进器反向运动,即可使运维车体向上升起;
47.(3)当需要由池内向水池侧壁运动时,改变悬浮推进器的相对转速,使运维车体由水平方向转为竖直方向;而后,四个悬浮推进器同速喷射,并与水池侧壁贴合;当运维车体与水池侧壁贴合时,悬浮推进器提供相应的压力,保证运维车体与水池侧壁贴合;此时,驱动组件工作,带动运维车体在水池侧壁按设定要求移动;当池底工作完成后,四个悬浮推进器反向运动,即可使运维车体从水池侧壁上脱离;
48.直到完成设定的检测任务,即可停止工作。
49.本实施例中,运维车体上搭载有传感器固定工装,搭载标准的电气接口,可兼容多种规格传感器的安装。本实施例中,还包括感知传感器、云台摄像头、检测工装。其中,感知传感器为两个,一个云台摄像头设置在运维车体的一端,另一个云台摄像头设置在运维车体的另一端。云台摄像头、检测工装分别设置在运维车体上,感知传感器、云台摄像头、检测工装分别与控制系统相连。优选地,检测工装采用焊缝检测器。
50.本实施例的核电站水下运维机器人能够用于核电站水池下的检修、取样、切割和焊接等工作。其中,当其作为一种轻型载具平台时,可搭载各类焊缝检测传感器用于池底焊缝的检测。当其作为一种重型载具平台时,可搭载机械臂用于水下环境作业,机械臂末端可适配各类工具,用以实现检修、取样、切割和焊接等功能。本技术制备的样机尺寸为长1200mm
×
宽800mm
×
高700mm,其可满足如下环境工况的作业需求,温度:0~60℃,湿度:100%,辐照剂量:500gy/h,水深:30m。实验结果表明,本技术的核电站水下运维机器人核电站水下环境的工作需要,结构合理、运行稳定可靠。
51.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。