1.本技术涉及巡检机器人领域,尤其是涉及一种基于单钢缆轨道的检测机器人。
背景技术:
2.随着科技的发展,机器逐渐将人从繁杂的劳动中替换出来,越来越多的工作可以被机器人完成,降低工人的劳动强度和工作风险。在隧道和矿山巷道建设中,常需要不断的观测和记录不同位置的断层位移、围岩变形和渗水情况等工程地质条件来指导生产建设和检测施工安全。
3.相关技术中,公开号cn105666459b的中国发明专利文件中公开了一种井下巷道悬线巡检防爆机器人,包括监控机器人主体、过障机构和行走机构。所述过障机构包括过障导杆、预紧轮、下支架、导向套、预紧弹簧、弹簧调节螺母、销孔和导向槽;所述行走机构包括连接杆、主动轴自由端轴承座、上支架、菱形轴承座、主动轮、主动轴;所述监控机器人主体包括模块搭载框、防爆电池、防爆箱、防爆箱内的控制电路和各种传感器模块。该悬线巡检防爆机器人设备投入少、成本低、监控系统简单,同时达到了对井下环境参数的全面监控;能在架设好的钢丝绳上以预想的速度平稳爬行,具有上下坡越障碍功能。该悬线巡检防爆机器人硬件全部采用防爆设计,可以在矿下等危险场合作业。
4.针对上述中的相关技术,发明人认为单钢缆巡检机器人在巡检过程中易受到自身载荷分布不均的影响发生歪斜,机器人发生脱轨和卡顿的概率增加。
技术实现要素:
5.为了改善机器人因自身载荷分布不均易发生歪斜脱轨的情况,本技术提供一种基于单钢缆轨道的检测机器人。
6.本技术提供的一种基于单钢缆轨道的检测机器人采用如下的技术方案:
7.一种基于单钢缆轨道的检测机器人,包括沿巷道长度方向设置的钢丝绳,钢丝绳下方设置有安装板,安装板两端均设置有立板,立板均设置有用于带动安装板沿钢丝绳运动的驱动组件,安装板两端均固定连接有沿钢丝绳长度方向设置的转轴,转轴转动连接于立板,转轴远离立板一端均螺纹连接有螺母,转轴均套设有扭簧,扭簧一端固定连接于立板,扭簧远离立板一端固定连接于螺母,扭簧自然状态下安装板处于水平状态,螺母侧壁均螺纹连接有第二紧固螺栓,第二紧固螺栓均贯穿螺母的侧壁设置,第二紧固螺栓能够抵接于转轴,安装板设置有多个用于调节安装板平衡的调平组件。
8.通过采用上述方案,将巡检用的仪器和设备挂载到安装板上,当安装板的载荷分布不均匀时,安装板沿转轴发生转动,转动螺母调整扭簧对转轴的扭矩,对安装板进行粗略调整,拧紧第二紧固螺栓稳定螺母的位置维持扭簧的扭矩,调节调平组件对安装板的偏转状态进行进一步修正。采用扭簧粗略调整和调平组件修正的方案调整安装板载荷分布对机器人整体姿态的影响,调整驱动组件与钢丝绳的连接稳定性,降低机器人脱轨或卡顿的概率。
9.优选的,调平组件包括多个开设于安装板表面的燕尾槽,燕尾槽沿垂直钢丝绳长度方向设置,燕尾槽内均滑动连接有滑块,滑块沿燕尾槽长度方向滑动。
10.通过采用上述方案,根据安装板的修正需求,灵活的调整滑块,将滑块沿燕尾槽滑动至与安装板倾斜方向相反的位置处,辅助扭簧对安装板的姿态进行修正。
11.优选的,滑块均螺纹连接有第一紧固螺栓,第一紧固螺栓贯穿滑块设置,第一紧固螺栓靠近滑块一端能够抵接于安装板。
12.通过采用上述方案,当滑块调整到合适位置后,拧紧第一紧固螺栓,第一紧固螺栓的端部抵接于安装板,第一紧固螺栓锁紧滑块,降低滑块在机器人运行过程中滑动的概率。
13.优选的,安装板靠近钢丝绳一侧固定连接有水平泡。
14.通过采用上述方案,在工人调整扭簧扭矩和滑块的位置时,工人参考水平泡的确认安装板的姿态,使安装板尽量的处于水平的稳定状态,提高调节的准确性。
15.优选的,所有立板靠近安装板一端均固定连接有多个限位杆,限位杆沿安装板边长阵列设置,限位杆均能够抵接于安装板远离钢丝绳一侧。
16.通过采用上述方案,限位杆在安装板远离钢丝绳一侧限制安装板的转动幅度,便于工人在挂载仪器时稳定安装板,降低安装板因载荷分布不均发生翻滚的概率。
17.优选的,安装板靠近钢丝绳一侧固定连接有竖直设置的滑杆,滑杆滑动连接有套管,套管沿滑杆长度方向滑动,套管靠近钢丝绳一端转动连接有辅助轮,辅助轮滑动连接于钢丝绳,滑杆套设有推簧,推簧一端抵接于安装板,推簧远离安装板一端抵接于套管,推簧给套管靠近钢丝绳的力。
18.通过采用上述方案,推簧推动套管和辅助轮向钢丝绳移动,辅助轮抵接于钢丝绳,辅助轮在推簧的作用下调整驱动组件附近钢丝绳的张紧力,提高驱动组件与钢丝绳连接的稳定性。
19.优选的,立板靠近钢丝绳远离驱动组件位置处均固定连接有竖杆,竖杆均套设有多个配重块。
20.通过采用上述方案,利用立板远离驱动组件位置处的配重块平衡驱动组件的重量,降低立板因驱动组件的重量发生歪斜的概率,提高机器人运行的稳定性。
21.优选的,钢丝绳固定连接有多个用于吊装的吊杆,竖杆远离立板一端均转动连接有多个水平的拨杆,拨杆沿竖杆圆周方向阵列设置,拨杆位于钢丝绳上方且拨杆能够抵接于吊杆,拨杆远离竖杆一端呈钩状设置。
22.通过采用上述方案,在机器人移动过程中始终有拨杆位于钢丝绳上方,当拨杆遇到吊杆时,拨杆在吊杆的推动下转动进而绕过吊杆继续保持在钢丝绳上方。机器人意外脱轨时,拨杆能够勾住钢丝绳降低机器人坠落的概率。
23.综上所述,本技术具有以下有益效果:
24.1.采用扭簧粗略调整和调平组件修正的方案调整安装板载荷分布对机器人整体姿态的影响,调整驱动组件与钢丝绳的连接稳定性,降低机器人脱轨或卡顿的概率;
25.2.根据安装板的修正需求,灵活的调整滑块,将滑块沿燕尾槽滑动至与安装板倾斜方向相反的位置处,辅助扭簧对安装板的姿态进行修正;
26.3.利用立板远离驱动组件位置处的配重块平衡驱动组件的重量,降低立板因驱动组件的重量发生歪斜的概率,提高机器人运行的稳定性。
附图说明
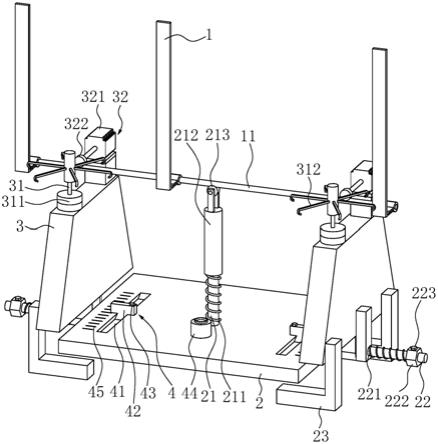
27.图1是本技术实施例的基于单钢缆轨道的检测机器人的结构示意图。
28.附图标记说明:1、吊杆;11、钢丝绳;2、安装板;21、滑杆;211、推簧;212、套管;213、辅助轮;22、转轴;221、扭簧;222、螺母;223、第二紧固螺栓;23、限位杆;3、立板;31、竖杆;311、配重块;312、拨杆;32、驱动组件;321、减速电机;322、滚轮;4、调平组件;41、燕尾槽;42、滑块;43、第一紧固螺栓;44、水平泡;45、刻度线。
具体实施方式
29.以下结合附图1对本技术作进一步详细说明。
30.本技术实施例公开一种基于单钢缆轨道的检测机器人。参照图1,包括多个固定连接于围岩的吊杆1,所有吊杆1共同固定连接有钢丝绳11,钢丝绳11下方设置有沿钢丝绳11长度方向设置的安装板2,安装板2两端均连接有立板3,立板3均设置有驱动组件32,驱动组件32包括固定连接于立板3靠近钢丝绳11位置处的减速电机321,减速电机321的输出轴垂直钢丝绳11的长度方向设置,减速电机321的输出轴均固定连接有滚轮322,滚轮322均滑动连接于钢丝绳11,立板3靠近钢丝绳11远离减速电机321位置处均固定连接有竖杆31,竖杆31均套设有多个配重块311。利用立板3远离驱动组件32位置处的配重块311平衡驱动组件32的重量,降低立板3因驱动组件32的重量发生歪斜的概率,提高机器人运行的稳定性。竖杆31远离立板3一端均转动连接有多个水平的拨杆312,拨杆312沿竖杆31圆周方向阵列设置,拨杆312位于钢丝绳11上方且拨杆312能够抵接于吊杆1,拨杆312远离竖杆31一端呈钩状设置。在机器人移动过程中始终有拨杆312位于钢丝绳11上方,当拨杆312遇到吊杆1时,拨杆312在吊杆1的推动下转动进而绕过吊杆1继续保持在钢丝绳11上方。机器人意外脱轨时,拨杆312能够勾住钢丝绳11降低机器人坠落的概率。
31.参照图1,安装板2靠近钢丝绳11一侧固定连接有竖直设置的滑杆21,滑杆21滑动连接有套管212,套管212沿滑杆21长度方向滑动,套管212靠近钢丝绳11一端转动连接有辅助轮213,辅助轮213滑动连接于钢丝绳11,滑杆21套设有推簧211,推簧211一端抵接于安装板2,推簧211远离安装板2一端抵接于套管212,推簧211给套管212靠近钢丝绳11的力。推簧211推动套管212和辅助轮213向钢丝绳11移动,辅助轮213抵接于钢丝绳11,辅助轮213在推簧211的作用下调整驱动组件32附近钢丝绳11的张紧力,提高驱动组件32与钢丝绳11连接的稳定性。
32.参照图1,安装板2设置有多个调平组件4,调平组件4包括多个开设于安装板2表面的燕尾槽41,燕尾槽41沿垂直钢丝绳11长度方向设置,燕尾槽41内均滑动连接有滑块42,滑块42沿燕尾槽41长度方向滑动,滑块42均螺纹连接有第一紧固螺栓43,第一紧固螺栓43贯穿滑块42设置,第一紧固螺栓43靠近滑块42一端能够抵接于安装板2。安装板2靠近所有燕尾槽41位置处均设置有刻度线45,刻度线45均沿燕尾槽41长度方向设置。根据安装板2的修正需求,灵活的调整滑块42,将滑块42沿燕尾槽41滑动至与安装板2倾斜方向相反的位置处,辅助扭簧221对安装板2的姿态进行修正。当滑块42调整到合适位置后,拧紧第一紧固螺栓43,第一紧固螺栓43的端部抵接于安装板2,第一紧固螺栓43锁紧滑块42,降低滑块42在机器人运行过程中滑动的概率。安装板2靠近钢丝绳11一侧固定连接有水平泡44。工人参考水平泡44的确认安装板2的姿态,使安装板2尽量的处于水平的稳定状态,提高调节的准确
性。
33.参照图1,安装板2两端均固定连接有沿钢丝绳11长度方向设置的转轴22,转轴22转动连接于立板3,转轴22均套设有扭簧221,扭簧221一端固定连接于立板3,扭簧221远离立板3一端均固定连接有螺母222,螺母222螺纹连接于转轴22,扭簧221自然状态下安装板2处于水平状态。螺母222侧壁均螺纹连接有第二紧固螺栓223,第二紧固螺栓223均贯穿螺母222的侧壁设置,第二紧固螺栓223能够抵接于转轴22。当安装板2的载荷分布不均匀时,安装板2沿转轴22发生转动,转动螺母222调整扭簧221对转轴22的扭矩,对安装板2进行粗略调整,拧紧第二紧固螺栓223稳定螺母222的位置维持扭簧221的扭矩,调节调平组件4对安装板2的偏转状态进行进一步修正。
34.参照图1,所有立板3靠近安装板2一端均固定连接有多个限位杆23,限位杆23沿安装板2边长阵列设置,限位杆23均能够抵接于安装板2远离钢丝绳11一侧。限位杆23在安装板2远离钢丝绳11一侧限制安装板2的转动幅度,便于工人在挂载仪器时稳定安装板2,降低安装板2因载荷分布不均发生翻滚的概率。
35.本技术实施例一种基于单钢缆轨道的检测机器人的实施原理为:将巡检用的仪器和设备挂载到安装板2上,当安装板2的载荷分布不均匀时,安装板2沿转轴22发生转动,转动螺母222调整扭簧221对转轴22的扭矩,对安装板2进行粗略调整,拧紧第二紧固螺栓223稳定螺母222的位置维持扭簧221的扭矩,调节调平组件4对安装板2的偏转状态进行进一步修正。采用扭簧221粗略调整和调平组件4修正的方案调整安装板2载荷分布对机器人整体姿态的影响,调整驱动组件32与钢丝绳11的连接稳定性,降低机器人脱轨或卡顿的概率。
36.本技术实施例改善机器人因自身载荷分布不均易发生歪斜脱轨的情况。
37.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。