具有受控热传导的机器人力/扭矩传感器
1.相关申请的交叉引用
2.本技术要求于2020年6月16日提交的题为“robotic force/torque sensor with controlled thermal conduction”的美国专利申请第16/902,674号的优先权,其公开内容通过引用整体并入本文。
技术领域
3.本发明总体上涉及用于机器人应用的力/扭矩传感器,并且具体地涉及在操作期间在整个传感器主体上具有可预测的热量分布的力/扭矩传感器。
背景技术:
4.机器人技术在工业、医疗、科学、航空航天和其他应用中是一个不断增长且日益重要的领域。在机器人臂或与其附接的工具与工件接触的许多情况下,必须密切监控所施加的力和/或扭矩。因此,力/扭矩传感器是许多机器人系统的重要组成部分。
5.许多类型的力/扭矩传感器在本领域中是已知的。一种已知类型的力/扭矩传感器使用机械
‑
电换能器,如应变计,来测量连接传感器主体两个区域的小梁的变形,一个这样的区域连接到机器人臂,另一个区域连接到机器人工具。例如,传感器主体的中心区域(在本领域中通常称为工具适配器板(tool adapter plate,tap),并且在本文中称为“工具接口区域”)(直接或间接)连接到工具。围绕工具接口区域环形地设置并与工具接口区域间隔开的传感器主体的另一区域(在本领域中通常称为安装适配器板(mounting adapter plate,map),并在本文中称为“安装接口区域”)(直接或间接)连接到机器人臂。虽然在一些实施例中,工具接口区域和安装接口区域可以是组装成力/扭矩传感器的分开的部件,但在许多现代设计中,力/扭矩传感器主体是单一设计,例如由单个块(或片)金属铣削而成。术语工具接口区域和安装接口区域是指两种类型的力/扭矩传感器结构。
6.当然,在任何给定的应用中,机器人可以连接到工具接口区域并且工具可以连接到安装接口区域。因此,术语工具接口区域和安装接口区域在本文中仅用作参考术语。此外,如本领域公知的,一个或多个其他装置可以插入在力/扭矩传感器与工具或机器人之间,例如机器人工具更换器的主单元和工具单元。
7.安装接口区域和工具接口区域通过多个相对薄的(因此可机械变形的)梁彼此连接,这些梁围绕工具接口区域径向布置,在一些情况下类似于车轮的辐条。分别附接到工具接口区域和安装接口区域的物体之间的相对力或扭矩试图相对于工具接口区域移动安装接口区域,导致至少一些梁的轻微变形或弯曲。
8.诸如应变计的换能器以各种位置和取向固定到至少一些梁的一些或所有表面。表现出与应变相关的阻力的应变计将梁表面的拉伸和压缩应变(由梁的机械变形引起)转换为电信号。来自仪表化梁上的应变计的信号在校准后被一起处理,以解析工具接口区域和安装接口区域之间以及因此工具和机器人之间的相对力和/或扭矩的大小和方向。作为非限制性示例,均已转让给本技术的受让人的美国专利公开2017/0211999和2017/0205296以
及国际公开wo2018/200668描述了用于机器人应用的力/扭矩传感器。这些公开内容通过引用整体并入本文。
9.如本领域中已知的,并且如以上并入的公开内容中所讨论的,热变化对准确的力/扭矩测量具有有害影响。例如,传感器和/或电缆的电阻变化、传感器主体材料膨胀以及其他影响会导致误差。
10.与箔应变计相比,硅应变计由于其高灵敏度而优选用于许多应用。然而,它们表现出明显更差的温度性能。硅应变计有两种主要的温度效应——应变计的电阻温度系数(temperature coefficient of resistance,tcr)和应变计的应变因子温度系数(temperature coefficient of gage factor,tc gf)。当硅应变计的电阻随温度变化时,tcr就会出现。在某些应变计中,电阻在0
‑
50℃温度波动范围内的变化可能比传感器满量程加载时的变化更大。tcgf的出现是因为硅应变计的应变因子(其描述应变计经受的应变与所导致的其电阻变化之间的相关性)与温度有关。用于将应变计连接在一起并测量电子设备的导体的电阻也与温度有关。
11.随着温度升高,金属力/扭矩传感器主体将膨胀至材料的膨胀系数描述的程度。例如,钢的膨胀系数大约为11ppm/k,这意味着温度升高1摄氏度时可以预期11μm/m的膨胀。即使没有施加机械载荷,这种膨胀也会被表面应变计“检测”为明显应变。
12.可引入误差的其他热因素(尽管通常不如上述那些突出)包括在其上具有温度梯度的应变计的平衡电路的错误非共模输出;传感器主体材料的弹性模量的温度依赖性;由于激励电压引起的应变计的自发热;应变计载体材料的相对湿度和吸湿性;以及用于将应变计粘合到传感器主体表面的粘合剂的有效性与温度相关的变化。
13.在本领域中已经尝试消除温度变化对力/扭矩传感器的有害影响。具有适应特定材料的温度特性的自补偿应变计表现出较少的温度相关效应。然而,自补偿应变计比传统应变计更复杂、更昂贵,并且必须与力/扭矩传感器主体材料仔细匹配。此外,一些电路配置,例如半惠斯通电桥电路,会导致温度引起的变化表现为至少在电桥中的所有应变计都经历相同温度变化的情况下共模信号被抵消(如上所述,跨桥配置的热梯度破坏了这一假设)。
14.如以上并入的公开内容中所讨论的,用于针对温度引起的误差补偿应变计读数的先进技术在本领域中是已知的。例如,us2017/0205296公开了将应变计固定到传感器主体的非受力部分。由于传感器主体的膨胀以及传感器和/或电缆的电阻率的变化,该应变计检测到的任何明显应变都是纯热诱导的,并且可以在测量实际力和扭矩时从其他应变计的输出中通过数学方法去除。wo 2018/200668公开了接近应变计的热传感器的使用,以及针对局部温度变化对个别应变计输出的显式补偿。该公开文本还公开了一种瞬态温度补偿方法,由此对整个传感器主体中的瞬态温度分布进行建模,并且从测量信号中预测和去除热致应变。
15.通常,这些技术在整个力/扭矩传感器主体上温度变化均匀的情况下最有效——这在实际应用中很少出现。然而,即使接受不均匀加热的必然性,控制加热使得基本上所有应变计都基本上同时经历温度变化将是有利的。
16.本文的背景技术部分被提供用于将本发明的实施例置于技术和操作背景中,以帮助本领域技术人员理解它们的范围和效用。背景技术部分中描述的方法可以采用,但它们
不一定是先前已构想或采用过的方法。除非明确指出,本文中的任何陈述都不能仅因为将其包含在背景技术部分中而被认为是现有技术。
技术实现要素:
17.下面给出本公开内容的简化概述,以便为本领域技术人员提供基本的理解。该概述不是对本公开的广泛概述并且不旨在确定本发明实施例的关键/必要要素或描绘本发明的范围。本概述的唯一目的是以简化形式呈现本文公开的一些概念,作为稍后呈现的更详细描述的前言。
18.根据本文描述和要求保护的一个或多个实施例,机器人力/扭矩(ft)传感器约束由附接的工具产生的热量通过ft传感器主体向径向方向的传导。来自工具的热量通过导热构件引导到ft传感器主体的中心。另外,ft传感器主体的中心以外的部分通过绝热构件与工具产生的热隔离。换能器(例如附接到可变形梁表面的应变计)布置在与ft传感器主体的中心基本等距离处。因此,当热量从中心通过ft传感器主体径向向外传导时,所有换能器在任何给定时间经历基本相等的热负荷。本发明的实施例基本上消除了以差分电路拓扑(例如半桥或四分之一桥)接线的转换器组之间的热梯度,增强了这种电路抑制由ft传感器主体或传感器本身热变化引起的共模信号分量的能力。消除ft传感器主体中的热梯度,而不是径向方向上的热梯度,提高了已知温度补偿技术的有效性。
19.一个实施例涉及一种置于机器人和发热工具之间的机器人力/扭矩传感器。该机器人力/扭矩传感器包括:工具接口区域,其具有中心孔;安装接口区域,其围绕工具接口区域环形设置并与工具接口区域间隔开;多个可变形梁,其围绕工具接口区域径向延伸并将工具接口区域连接到安装接口区域;换能器,其固定到至少一些可变形梁的表面并且被配置为将可变形梁表面处的拉伸和压缩应变转换成电信号;导热构件,其被配置为以导热关系接触所述中心孔;和绝热构件,其被配置为使机器人力/扭矩传感器的除中心孔之外的部分隔离与导热构件的热接触。
20.另一个实施例涉及一种操作机器人力/扭矩传感器的方法,该机器人力/扭矩传感器具有:工具接口区域,其具有中心孔;安装接口区域,其围绕工具接口区域环形布置并且与工具接口区域间隔开;多个可变形梁,其围绕工具接口区域径向延伸并将工具接口区域连接到安装接口区域;以及换能器,其固定到至少一些可变形梁的表面并且被配置为将可变形梁表面处的拉伸和压缩应变转换成电信号。导热构件与中心孔处于导热关系。机器人力/扭矩传感器的除中心孔之外的部分通过使用绝热构件隔离与导热构件的热接触。来自附接到导热构件的发热工具的热量通过导热构件传导到中心孔,并且通过工具接口区域和可变形梁径向向外传导。
附图说明
21.下面将参考附图更全面地描述本发明,其中示出了本发明的实施例。然而,本发明不应被解释为限于本文阐述的实施例。相反,提供这些实施例是为了使本公开彻底和完整,并将本发明的范围充分传达给本领域技术人员。相同的附图标记始终指代相同的要素。
22.图1是操作中的力/扭矩传感器的分解截面图。
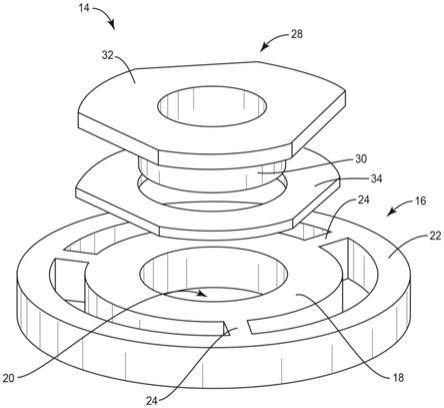
23.图2是力/扭矩传感器的分解立体图。
24.图3是力/扭矩传感器的截面图。
25.图4是操作机器人力/扭矩传感器的方法的流程图。
具体实施方式
26.为了简单和说明的目的,主要通过参考其示例性实施例来描述本发明。在以下描述中,阐述了许多具体细节以提供对本发明的透彻理解。然而,对于本领域的普通技术人员来说很容易明白,本发明可以在不限于这些具体细节的情况下实施。在该描述中,没有详细描述众所周知的方法和结构,以免不必要地混淆本发明。
27.图1是附接到机器人臂12的典型工具10(例如研磨机)的分解截面图,例如可以部署在工厂或其他应用中。机器人力/扭矩(ft)传感器14插入在工具10和机器人12之间。ft传感器14测量机器人12和工具10之间的力和扭矩,即,当机器人12将工具10压在工件上时。如本领域中已知的,其他部件可以包括在该“堆叠”中,例如机器人工具更换器部件,其提供机械接口并且提供用于在机器人12和附接工具10之间传递公用设施。许多工具10产生显著的热量,该热量被传导至连接的金属部件,如ft传感器14。由ft传感器14主体的不均匀/不受控的发热引起的偶然温度梯度是力和扭矩测量误差的重要来源。
28.图2示出ft传感器14。ft传感器主体16包括具有中心孔20的工具接口区域18、安装接口区域22和连接工具接口区域18和安装接口区域22的多个可变形梁24。安装接口区域22围绕工具接口区域18环形布置,并与其间隔开。可变形梁24围绕工具接口区域18径向延伸。图2中示出的实施例具有三个可变形梁24——在上面并入的公开文本us 2017/0205296中示出并描述的配置。然而,该配置不是限制性的,并且通常可以使用任何数量的可变形梁24。
29.换能器26固定到至少一些可变形梁24的表面。换能器26被配置为将可变形梁表面处的拉伸和压缩应变转换成电信号。在图2所示的实施例中,换能器26包括应变计,例如硅应变计,其表现出机械应变相关电阻。然而,本发明的实施例不限于使用硅(或其他类型的)应变计作为换能器26。换能器26可以仅附接到每个仪表化可变形梁24的一个表面,例如最上表面,或者它们可以附接到每个仪表化可变形梁24的一些或所有表面,例如相对的表面。应变计的各种布线拓扑是已知的,例如惠斯通电桥、半桥和四分之一桥配置。注意,连接换能器26的布线和将产生的电信号解析成力和扭矩的测量电路在图2中没有示出。优选地,换能器26沿着梁的长度以基本相同的距离固定到可变形梁24的表面,从工具接口区域18测量。
30.考虑仅包括主体16和换能器26的常规ft传感器。工具可直接或通过导热(即,金属)装置附接到工具接口区域18(或安装接口区域22)。当工具操作时,电动机、焊头等会产生大量的热量。该热量被传导到工具接口区域18的面对表面,例如上表面,如图2所示。虽然热量将沿着可变形梁24向安装接口区域22传导,但它也从工具接口区域18(和可变形梁24)的上表面穿过ft传感器14的主体传导到下表面。也就是说,除了随着热量沿着可变形梁24流向安装接口区域22时的任何径向梯度之外,还会在ft传感器主体16内产生轴向热梯度。这些双向热梯度(轴向和径向)难以准确建模。因此,在将温度补偿技术应用于换能器26时很难考虑到它们。此外,用于测量并因此减去热致应变的无应力换能器26的用途有限,因为ft传感器主体16的不同部分将处于不同的温度。
31.特别地,在换能器26附接到仪表化可变形梁24的相对侧,例如上表面和下表面,如图2所示,并且这些换能器26以差分配置例如半桥接线的常见情况下,轴向热梯度将加热上表面的换能器26,然后加热下表面上的换能器26。因为在这两个换能器26的输出中温度引起的变化不同,所以半桥电路不能将这些变化作为共模信号来抑制。
32.根据本发明的实施例,来自附接工具的热量被引导到工具接口区域18的中心,并且仅在那里。然后热量仅径向地通过ft传感器主体16,通过工具接口区域18并沿着可变形梁24朝向安装接口区域22传导。虽然这会导致影响ft传感器14操作的热梯度,但它是可预测的梯度。例如,热量基本同时地施加到工具接口区域18的基本整个厚度。因此,当热量通过工具接口区域18径向向外传导并进入可变形梁24时,在径向上几乎没有或没有热梯度。这意味着附接到仪表化可变形梁24的上表面和下表面的换能器26将基本上同时经历基本上相同幅度的温度变化。因此,诸如半桥之类的平衡电路拓扑将抑制共模温度引起的应变,并且半桥将仅输出与施加的力和扭矩引起的梁24的变形相对应的信号。将所有换能器26沿着梁24的长度以基本相同的距离附接到可变形梁24的各个表面上,从工具接口区域18测量,确保所有换能器基本上同时经历温度变化。通过ft传感器14的热流的这些受控的、可预测的方面极大地简化了温度补偿技术对换能器26的输出的应用。
33.在一个实施例中,如图2所示,来自附接工具的热量通过导热构件28被引导到工具接口区域中心孔20。导热构件28包括一部分,例如,设置在中心孔20内的柄部30。导热构件28的柄部30以导热关系接触中心孔20。例如,在一个实施例中,柄部30与中心孔20的内表面形成紧密的物理配合。在另一实施例中,柄部30压配(press
‑
fit)到中心孔20中。在又一实施例中,柄部30和中心孔20之间的空间填充有导热膏。柄部30可以是圆柱形管,如图所示,或者可以是实心的。此外,虽然中心孔20和柄部30分别被描绘为圆形和圆柱形,但是这些形状不是限制性的。中心孔20和柄部30可以是矩形的、星形的或以导热关系实现接触的任何其他配合形状。
34.顾名思义,导热构件28由具有高热导率的材料形成,例如铝或铜。除了高导热性之外,导热构件28必须表现出足够的强度和刚度以支撑附接工具,并将力和扭矩从工具传递到工具接口区域18,而基本上没有弯曲、压缩或其他变形。为了便于与工具接口区域18刚性连接,导热构件28包括法兰32。如本文进一步讨论的,法兰32可以通过螺栓或其他紧固件或通过其他方式连接到工具接口区域18。
35.为确保来自附接工具的热量仅被引导至中心孔20,而不传导至工具接口区域18的上表面,绝热构件34插入到导热构件28的法兰32和工具接口区域18的面对表面之间。在图2所示的实施例中,绝热构件34是平坦的环形圈,即大垫圈,但是这种形状不是限制性的。绝热构件34被配置为使ft传感器14的除中心孔20之外的所有部分隔离与导热构件28的热接触。因此,它优选地至少与导热构件28的法兰32共同延伸,并且在一些实施例中可以径向延伸超过法兰32。顾名思义,绝热构件34由具有低热导率的材料形成,例如钛、不锈钢、玻璃纤维等。除了低热导率之外,绝热构件34必须表现出足够的强度和刚度以将力和扭矩从导热构件28的法兰32传递到工具接口区域18,基本上没有弯曲、压缩或其他变形。
36.图3是处于操作配置中的ft传感器14的截面图(图1以分解截面图示出该配置)。ft传感器主体16包括工具接口区域18、安装接口区域22和将工具接口区域18连接到安装接口区域22的多个可变形梁24(图3中未示出)。至少一些可变形梁24配备有换能器26。包括柄部
30和法兰32的导热构件28设置在ft传感器14内和上方,使得柄部30配合在工具接口区域18的中心孔20内,并且法兰32至少部分地在工具接口区域18的上表面上方延伸。绝热构件34介于导热构件28的法兰32和ft传感器14的工具接口区域18之间。在一个实施例中,导热构件28通过多个紧固件36,例如埋头螺栓,刚性地固定到工具接口区域18,将法兰32连接到工具接口区域18,并且延伸穿过绝热构件34中的通孔。紧固件36(例如,螺栓、螺钉、铆钉等)优选地由具有低热导率的金属形成,例如316号不锈钢。将导热构件28和绝热构件34刚性地固定到ft传感器14的其他方式在本发明的实施例的范围内。例如,在一个实施例中,粘合剂被施加在法兰32和绝热构件34的一个面之间,并且还施加在绝热构件34的另一面和工具接口区域18的面对侧之间。
37.在实践中,(直接或间接)附接到ft传感器14的导热构件28的机器人工具,例如,焊头、诸如具有电动机的钻头或研磨器等,产生显著的热量。该热量由导热构件28引导到工具接口区域18的中心孔20,在那里它通过ft传感器14径向向外传导,在每个径向方向上基本相等。绝热构件34使ft传感器14(特别是工具接口区域18的面对表面)与该热量隔离,确保从工具传导的基本上所有热量都被引导到工具接口区域18中心孔20。这种配置基本上消除了轴向上(即,穿过ft传感器主体16的厚度)的任何热梯度。因为附接到仪表化可变形梁24的换能器26沿着梁的长度以基本相等的距离定位,从工具接口区域18测量,每个换能器26在任何给定时间经历基本相等的热负荷。特别地,以诸如半桥或四分之一桥之类的差分电路拓扑连线在一起的换能器26上的热梯度基本上被消除,允许差分电路有效地消除输出变化的共模热分量。
38.图4示出操作机器人ft传感器14的方法100中的步骤。如上所述,ft传感器14具有:工具接口区域18,其具有中心孔20;安装接口区域22,其围绕工具接口区域18环形地设置并且与工具接口区域18间隔开;多个可变形梁24,其围绕工具接口区域18径向延伸并将工具接口区域18连接到安装接口区域22;转换器26,其固定到至少一些可变形梁24的表面并被配置为将可变形梁表面处的拉伸和压缩应变转换成电信号。导热构件28被放置成与中心孔20具有导热关系(框102)。ft传感器14的除中心孔20之外的部分通过使用绝热构件34而隔离与导热构件28的热接触(框104)。在操作中,来自(直接或间接)附接到导热构件28的发热工具的热量通过导热构件28传导到中心孔20,并且通过工具接口区域18和可变形梁24径向向外传导。以这种方式,附接到一些可变形梁24的换能器26同时经受基本相同的热负荷,从而简化了温度补偿技术。
39.特别是在附接工具产生热量的应用中,本发明的实施例呈现优于现有技术的ft传感器的显著优点。通过将该热量引导至工具接口区域18的中心,并且以其他方式将ft传感器14与该热量隔离,确保沿严格的径向方向通过ft传感器主体16基本均匀地导热。通过将换能器26定位成与工具接口区域18基本等距,确保所有换能器26具有基本均匀的热负载,从而允许已知的温度补偿技术以更高的效率和准确度操作。
40.如本文所用,被描述为具有高热导率的材料具有大于约100btu/hr
‑
ft
‑
f的热导率k。在此描述为具有低热导率的材料具有小于约50btu/hr
‑
ft
‑
f的热导率k。如本文所用,术语“配置为”是指设置、组织、调整或安排以特定方式操作;该术语与“设计为”同义。如本文所用,术语“基本上”涵盖并考虑到机械公差、测量误差、随机变化和不精确的类似来源。
41.当然,在不脱离本发明的基本特征的情况下,本发明可以以不同于本文具体阐述
的方式的其他方式实施。本实施例在所有方面都被认为是说明性的而非限制性的,并且在所附权利要求的含义和等价范围内的所有变化都旨在包含在其中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。