1.本实用新型具体是一种仿生手用多自由度支架结构,涉及仿生手相关领域。
背景技术:
2.仿生手最早是为了帮助受镇静催眠药撒利多胺危害的儿童,作为一项研究项目的一部分,i
‑
limb看起来和动起来就像真手一样,之后,世界第一家“仿生手”工厂――触摸仿生公司在英国苏格兰正式成立,并开始为客户量身定做这种假手。
3.在仿生手用多自由度支架结构使用时,往往需要使用到特定的工具对仿生手进行安装固定,费时费力,导致影响仿生手的后续使用,并且不易快速对仿生手拆卸维修,操作不便。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种仿生手用多自由度支架结构。
5.本实用新型是这样实现的,构造一种仿生手用多自由度支架结构,该装置包括底板、支撑架、第一活动杆、第二活动杆、第三活动杆和夹持固定机构,所述底板与支撑架底部固定连接,所述夹持固定机构安装于第三活动杆前端,所述夹持固定机构包括固定套、插接套、推动机构、齿圈、推块和插块,所述固定套安装于第三活动杆前端,所述固定套中部设置有插接套,所述插接套前端设置有推动机构,所述推动机构与齿圈右端相咬合,所述齿圈内侧等距分布有推块,所述推块与插块左端相接触。
6.进一步的,所述支撑架与第一活动杆底部相连接,所述第一活动杆顶部设置有第二活动杆,所述第二活动杆与第三活动杆后端相连接。
7.进一步的,所述推动机构包括保护罩、滑块、齿条、螺杆和螺纹座,所述保护罩左端与固定套相固定,所述保护罩与滑块右端滑动配合,所述滑块与齿条右端相固定,所述齿条与齿圈右端相咬合,所述齿条前端设置有螺杆,所述螺杆与螺纹座内侧螺纹配合。
8.进一步的,所述插块包括插杆、压片、压簧和弹性杆,所述插杆与插接套内侧壁传动配合,所述插杆上端设置有压片,所述压片通过压簧与插接套内侧弹性连接,所述插杆上端设置有弹性杆。
9.进一步的,所述弹性杆共设置有两根,并且弹性杆均呈倾斜状分布。
10.进一步的,所述插块共设置有六个,并且插块沿插接套上端等距分布。
11.进一步的,所述推块横截面呈半圆状,并且推块共设置有六个。
12.进一步的,所述齿圈呈圆环状,并且齿圈与固定套内侧活动连接。
13.进一步的,所述齿圈为齿轮钢材质,耐磨性强。
14.进一步的,所述推块为合金钢材质,硬度高。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种仿生手用多自由度支架结构,与同类型设备相比,具有如下改进:
16.优点1:本实用新型所述一种仿生手用多自由度支架结构,通过在第三活动杆上端
设置了夹持固定机构,将仿生手嵌入于插接套内侧后,通过推动机构带动齿圈进行逆时针转动,使齿圈通过推块推动插块嵌入于仿生手内侧,对仿生手进行固定,达到了能够快速对仿生手进行安装的优点。
17.优点2:本实用新型所述一种仿生手用多自由度支架结构,通过在夹持固定机构上端设置了推动机构,转动螺杆,使螺杆在螺纹座内侧进行螺纹传动,带动齿条通过滑块在保护罩内侧进行移动,从而带动齿圈进行转动,达到了能够快速带动齿圈进行联动的优点。
18.优点3:本实用新型所述一种仿生手用多自由度支架结构,通过在夹持固定机构上端设置了插块,当插杆嵌入于仿生手内侧后,会使弹性钢抵住仿生手凹槽两侧,使插杆稳固插接,达到了能够对仿生手稳固固定的优点。
附图说明
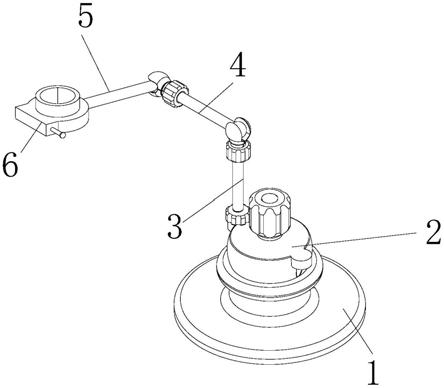
19.图1为本实用新型结构示意图;
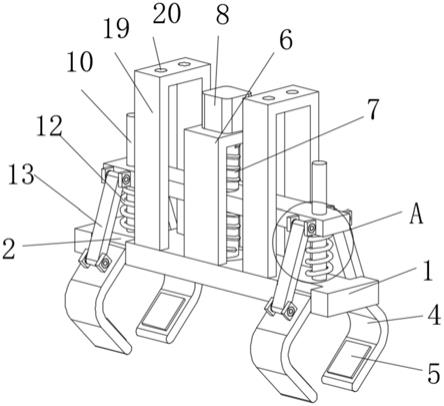
20.图2为本实用新型夹持固定机构立体结构示意图;
21.图3为本实用新型夹持固定机构剖面结构示意图;
22.图4为本实用新型推动机构剖面结构示意图;
23.图5为本实用新型插块剖面结构示意图。
24.其中:底板
‑
1、支撑架
‑
2、第一活动杆
‑
3、第二活动杆
‑
4、第三活动杆
‑
5、夹持固定机构
‑
6、固定套
‑
61、插接套
‑
62、推动机构
‑
63、齿圈
‑
64、推块
‑
65、插块
‑
66、保护罩
‑
631、滑块
‑
632、齿条
‑
633、螺杆
‑
634、螺纹座
‑
635、插杆
‑
661、压片
‑
662、压簧
‑
663、弹性杆
‑
664。
具体实施方式
25.下面将结合附图1
‑
5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1,本实用新型通过改进在此提供一种仿生手用多自由度支架结构,包括底板1、支撑架2、第一活动杆3、第二活动杆4、第三活动杆5和夹持固定机构6,底板1与支撑架2底部固定连接,夹持固定机构6安装于第三活动杆5前端,支撑架2与第一活动杆3底部相连接,第一活动杆3顶部设置有第二活动杆4,第二活动杆4与第三活动杆5后端相连接。
27.请参阅图2和图3,本实用新型通过改进在此提供一种仿生手用多自由度支架结构,夹持固定机构6包括固定套61、插接套62、推动机构63、齿圈64、推块65和插块66,固定套61安装于第三活动杆5前端,固定套61中部设置有插接套62,插接套62前端设置有推动机构63,推动机构63与齿圈64右端相咬合,齿圈64内侧等距分布有推块65,推块65与插块66左端相接触,插块66共设置有六个,并且插块66沿插接套62上端等距分布,推块65横截面呈半圆状,并且推块65共设置有六个,齿圈64呈圆环状,并且齿圈64与固定套61内侧活动连接,利于起到使齿圈64平稳转动的作用,齿圈64为齿轮钢材质,耐磨性强,推块65为合金钢材质,硬度高。
28.请参阅图4,本实用新型通过改进在此提供一种仿生手用多自由度支架结构,推动机构63包括保护罩631、滑块632、齿条633、螺杆634和螺纹座635,保护罩631左端与固定套
61相固定,保护罩631与滑块632右端滑动配合,滑块632与齿条633右端相固定,齿条633与齿圈64右端相咬合,齿条633前端设置有螺杆634,螺杆634与螺纹座635内侧螺纹配合,利于起到对齿条633进行推动的作用。
29.请参阅图5,本实用新型通过改进在此提供一种仿生手用多自由度支架结构,插块66包括插杆661、压片662、压簧663和弹性杆664,插杆661与插接套62内侧壁传动配合,插杆661上端设置有压片662,压片662通过压簧663与插接套62内侧弹性连接,插杆661上端设置有弹性杆664,弹性杆664共设置有两根,并且弹性杆664均呈倾斜状分布,利于起到进行限位固定的作用。
30.本实用新型通过改进提供一种仿生手用多自由度支架结构,工作原理如下;
31.第一,在使用前,将仿生手用多自由度支架结构进行水平放置,使底板1对该结构进行固定支撑;
32.第二,在使用时,将仿生手嵌入于插接套62内侧后,转动螺杆634,使螺杆634在螺纹座635内侧进行螺纹传动,带动齿条633通过滑块632在保护罩631内侧进行移动,从而带动齿圈64进行转动;
33.第三,齿圈64进行逆时针转动,使齿圈64通过推块65推动插块66嵌入于仿生手内侧,对仿生手进行固定;
34.第四,并且当插杆661嵌入于仿生手内侧后,会使弹性钢664抵住仿生手凹槽两侧,使插杆661稳固插接,达到了能够对仿生手稳固固定;
35.第五,随后通过第一活动杆3、第二活动杆4、第三活动杆5的相对运动,实现仿生手的多自由度的运动;
36.第六,当要对仿生手拆卸时,逆时针转动螺杆634,使齿条633带动齿圈64顺时针转动,使插杆661解除对仿生手的插接即可。
37.本实用新型通过改进提供一种仿生手用多自由度支架结构,通过在第三活动杆5上端设置了夹持固定机构6,将仿生手嵌入于插接套62内侧后,通过推动机构63带动齿圈64进行逆时针转动,使齿圈64通过推块65推动插块66嵌入于仿生手内侧,对仿生手进行固定,达到了能够快速对仿生手进行安装的优点;通过在夹持固定机构6上端设置了推动机构63,转动螺杆634,使螺杆634在螺纹座635内侧进行螺纹传动,带动齿条633通过滑块632在保护罩631内侧进行移动,从而带动齿圈64进行转动,达到了能够快速带动齿圈64进行联动的优点;通过在夹持固定机构6上端设置了插块66,当插杆661嵌入于仿生手内侧后,会使弹性钢664抵住仿生手凹槽两侧,使插杆661稳固插接,达到了能够对仿生手稳固固定的优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。