1.本实用新型涉及医疗器械技术领域,尤其是一种与膝关节机器人手术配合使用的侧方握持式骨撬。
背景技术:
2.关节机器人手术是人工关节置换的发展趋势。在关节机器人的辅助下,可以将人工关节假体植入到准确的位置,使关节假体具有更长的寿命和更好的临床疗效。常规的膝关节置换术,常常需要助手用骨撬帮忙显露膝关节,但是膝关节机器人手术时,机器人会占据一个助手的位置,因此会妨碍助手使用骨撬协助显露该侧膝关节。因此需要借助其他骨撬工具,方便其他站位的助手协助显露该侧膝关节。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种与膝关节机器人手术配合使用的侧方握持式骨撬,具有适合手术助手从侧方把持骨撬协助露出膝关节、方便机器人手术顺利进行的特点。
4.为解决上述技术问题,本实用新型所采用的技术方案是:一种与膝关节机器人手术配合使用的侧方握持式骨撬,包括撬头、u型弯板、连杆和握持手柄,所述撬头连接在u型弯板的前侧,所述u型弯板的下部设有折弯延伸的连杆,所述握持手柄与连杆连接。
5.上述的一种与膝关节机器人手术配合使用的侧方握持式骨撬,所述连杆设有第一外六角板头,所述握持手柄为外周面易握紧的棒材制作,握持手柄设有内六角通孔,握持手柄通过内六角通孔与第一外六角板头活动连接。
6.上述的一种与膝关节机器人手术配合使用的侧方握持式骨撬,还包括第二外六角板头和第三外六角板头,所述第二外六角板头的一端头部与u型弯板的后侧面固定连接,另一端头部伸出u型弯板,所述第三外六角板头的一端头部与u型弯板的顶面固定连接,另一端头部伸出u型弯板。
7.上述的一种与膝关节机器人手术配合使用的侧方握持式骨撬,所述握持手柄用外六角棒材制作。
8.本实用新型提供的一种与膝关节机器人手术配合使用的侧方握持式骨撬,设置了包括撬头、u型弯板、连杆和握持手柄,所述撬头连接在u型弯板的前侧,所述u型弯板的下部设有折弯延伸的连杆,所述握持手柄与连杆连接。本实用新型的有益效果是:手术助手可从侧方握紧握持手柄,将撬头插入刀口暴露膝关节,可方便手术助手发力操作,配合机器人完成膝关节置换手术。具有结构简单、使用方便、提高医护操作效率的特点。
附图说明
9.图1为本实用新型实施例一的结构示意图;
10.图2为本实用新型实施例二的结构示意图;
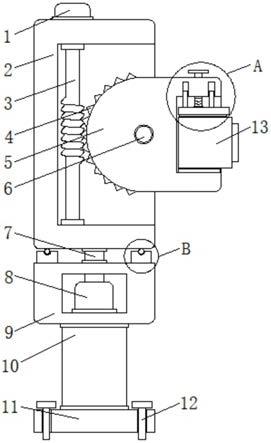
11.图3为本实用新型实施例三的结构示意图;
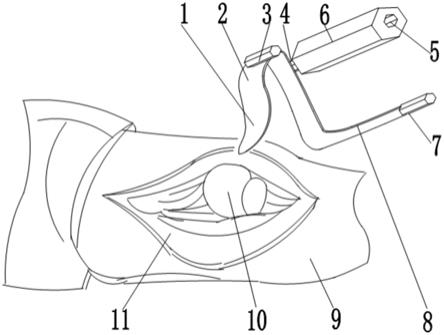
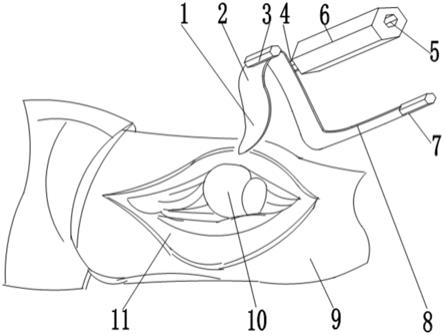
12.图4为本实用新型的使用方法示意图;
13.图5为本实用新型的另一种使用方法示意图。
14.图中各部件标号为:撬头1、u型弯板2、第三外六角板头3、第二外六角板头4、内六角通孔5、握持手柄6、第一外六角板头7、连杆8、患者腿部9、膝关节10、手术刀口11。
具体实施方式
15.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.如图1~5所示,本实用新型提供的一种与膝关节机器人手术配合使用的侧方握持式骨撬,实施例如下:
17.实施例一:(见图1)一种与膝关节机器人手术配合使用的侧方握持式骨撬,包括撬头1、u型弯板2、连杆8和握持手柄6,所述撬头1连接在u型弯板2的前侧,所述u型弯板2的下部设有折弯延伸的连杆8,所述握持手柄6与连杆8连接。使用方法:手术助手站在机器人一侧,右手抓紧握持手柄6,直接将撬头1插入手术刀口11内,使膝关节10外露,与机器人配合完成手术。
18.实施例二:(见图2)一种与膝关节机器人手术配合使用的侧方握持式骨撬,包括撬头1、u型弯板2、连杆8和握持手柄6,所述撬头1连接在u型弯板2的前侧,所述u型弯板2的下部设有折弯延伸的连杆8,所述握持手柄6与连杆8连接。所述连杆8设有第一外六角板头7,所述握持手柄6为外周面易握紧的棒材制作,握持手柄6设有内六角通孔5,握持手柄6通过内六角通孔5与第一外六角板头7活动连接。使用方法:手术助手站在机器人一侧,右手抓紧握持手柄6,握持手柄6通过内六角通孔5与第一外六角板头7连接,将撬头1插入手术刀口11内,使膝关节10外露,与机器人配合完成手术。
19.实施例三:(见图3、图4、图5)一种与膝关节机器人手术配合使用的侧方握持式骨撬,包括撬头1、u型弯板2、连杆8和握持手柄6,所述撬头1连接在u型弯板2的前侧,所述u型弯板2的下部设有折弯延伸的连杆8,所述握持手柄6与连杆8连接。所述连杆8设有第一外六角板头7,所述握持手柄6为外周面易握紧的棒材制作,握持手柄6设有内六角通孔5,握持手柄6通过内六角通孔5与第一外六角板头7活动连接。还包括第二外六角板头4和第三外六角板头3,所述第二外六角板头4的一端头部与u型弯板2的后侧面固定连接,另一端头部伸出u型弯板2,所述第三外六角板头3的一端头部与u型弯板2的顶面固定连接,另一端头部伸出u型弯板2。所述握持手柄6用外六角棒材制作。使用方法:手术助手站在机器人一侧,右手抓紧握持手柄6,握持手柄6通过内六角通孔5与第一外六角板头7连接,直接将撬头1插入手术刀口11内,撬动膝关节10外露,如果膝关节10不能外露,手术助手摘下握持手柄6与第二外六角板头4或者与第三外六角板头3连接,与机器人配合完成手术。这种操作方法可防止因为连杆8变形使操作不顺利,可方便手术助手发力操作。
20.据上述说明书的揭示和教导,本实用新型所属领域的技术人员还可以对上述实施
方式进行适当的变更和修改。因此,本实用新型并不局限于上面揭示和描述的具体实施方式,对本实用新型的一些修改和变更也应当落入本实用新型的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
技术特征:
1.一种与膝关节机器人手术配合使用的侧方握持式骨撬,其特征在于:包括撬头(1)、u型弯板(2)、连杆(8)和握持手柄(6),所述撬头(1)连接在u型弯板(2)的前侧,所述u型弯板(2)的下部设有折弯延伸的连杆(8),所述握持手柄(6)与连杆(8)连接。2.根据权利要求1所述的一种与膝关节机器人手术配合使用的侧方握持式骨撬,其特征在于:所述连杆(8)设有第一外六角板头(7),所述握持手柄(6)为外周面易握紧的棒材制作,握持手柄(6)设有内六角通孔(5),握持手柄(6)通过内六角通孔(5)与第一外六角板头(7)活动连接。3.根据权利要求2所述的一种与膝关节机器人手术配合使用的侧方握持式骨撬,其特征在于:还包括第二外六角板头(4)和第三外六角板头(3),所述第二外六角板头(4)的一端头部与u型弯板(2)的后侧面固定连接,另一端头部伸出u型弯板(2),所述第三外六角板头(3)的一端头部与u型弯板(2)的顶面固定连接,另一端头部伸出u型弯板(2)。4.根据权利要求3所述的一种与膝关节机器人手术配合使用的侧方握持式骨撬,其特征在于:所述握持手柄(6)用外六角棒材制作。
技术总结
本实用新型公开了一种与膝关节机器人手术配合使用的侧方握持式骨撬,设置了包括撬头、U型弯板、连杆和握持手柄,所述撬头连接在U型弯板的前侧,所述U型弯板的下部设有折弯延伸的连杆,所述握持手柄与连杆连接。本实用新型的有益效果是:手术助手可从侧方握紧握持手柄,将撬头插入刀口暴露膝关节,可方便手术助手发力操作,配合机器人完成膝关节置换手术。具有结构简单、使用方便、提高医护操作效率的特点。特点。特点。
技术研发人员:杨德金 邵宏翊 周一新 唐浩 陈明学
受保护的技术使用者:北京积水潭医院
技术研发日:2021.06.22
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。