1.本实用新型涉及捻线机领域,尤其是涉及一种内纱自动上纱避让装置。
背景技术:
2.现有技术中,汽车轮胎帘子线或地毯线以及工业线绳等加捻操作通常采用直捻机来完成。但喂入原丝卷装很大,通常有10公斤左右,使得现有直捻设备的外纱,即纱架纱和内纱,即锭子纱的上纱和下纱工作强度很高。拟改进现有加捻设备,使其适宜于由机器人替代人工进行上纱、下纱等之类的高强度、重复性劳动,成为当前直捻机设计改进的一个重要任务。
3.中国专利文献cn212223191u公开了直捻机外纱(纱架纱)上纱系统,能够实现智能化上纱操作,大幅提高操作效率,降低劳动强度,减少人工操作。但该直捻机结构对于内纱(锭子纱)上纱工作仍需由人工手工完成。如cn102212905a公开的现有直捻机,其锭子纱位于锭罐内,锭罐通常由上、中、下三部分组成,内纱张力器固定在锭罐盖顶部的位置。锭子纱上纱时,需手工移走锭罐、再把原丝卷装放到锭子上。显然,内纱上纱工作很繁琐,并且因为直捻机锭子安装位置很低,需要人工搬纱弯腰完成上纱工作,对于多工位的加捻设备挡车工而言,劳动强度相当大。现有技术中尚未见内纱的自动上纱方案。
4.如果要采用以机械臂的方式进行自动上纱,匀捻器、内纱张紧器等部件会对机械臂的运动造成干涉,这是一个技术难题。
技术实现要素:
5.本实用新型所要解决的技术问题在于提供一种内纱自动上纱避让装置,能够避开对机械臂的干涉,从而实现内纱的自动上纱,降低劳动强度,提高整个设备的智能化水平。
6.为解决上述技术问题,本实用新型所采用的技术方案是:一种内纱自动上纱避让装置,它包括用于避让机械臂的避让机构和锭罐;
7.所述的避让机构的摆动座与捻线机机架固定连接,摆动座与摆臂可转动的连接,在摆臂的自由端设有匀捻器,避让机构使匀捻器在与锭罐轴线对齐和离开锭罐外缘的两种状态之间切换;
8.所述的锭罐与捻线机机架连接,锭罐位于匀捻器一个极限位置的下方,锭罐的顶部开放以便于能够放入内纱卷装。
9.优选的方案中,在摆臂旋转极限位置附近的捻线机机架上设有电磁擒纵机构,电磁擒纵机构用于暂时的吸附摆臂或匀捻器,并在一段时间后释放摆臂或匀捻器;
10.摆臂通过转轴与摆动座连接,在转轴设有复位弹簧,用于使摆臂自由端的匀捻器复位至锭罐的正上方;
11.还设有接近传感器,接近传感器用于检测摆臂的旋转位置。
12.优选的方案中,所述的电磁擒纵机构内设有电磁铁。
13.优选的方案中,摆臂与转轴固定连接,转轴与摆动座可转动的连接,在摆动座或捻
线机机架上设有电机,电机通过传动机构与转轴连接,以驱动摆臂旋转;
14.还设有接近传感器,接近传感器用于检测上纱机器人、机械臂或内纱卷装的接近;
15.或者还设有称重传感器,称重传感器用于检测内纱卷装的重量,当低于预设值,则用于启动电机,驱动摆臂旋转。
16.优选的方案中,在摆动座上还设有限位块,限位块用于将匀捻器的摆动位置限定在锭罐的正上方。
17.优选的方案中,在摆动座上还设有缓冲气弹簧,用于缓冲摆臂的转动冲击。
18.优选的方案中,匀捻器的结构为:第一并捻座与摆臂固定连接,第一并捻架与第一并捻座可转动的连接,第一并捻座上设有第一并捻盘,在第一并捻盘的外缘位置设有用于穿入外纱的第一外纱瓷眼,在第一并捻盘的中心位置设有用于穿入内纱的第一内纱瓷眼,在第一并捻架的顶部位置设有用于合捻的导纱管;
19.内纱张力座与第一并捻盘可转动的连接,内纱张力器与内纱张力座固定连接,在内纱张力座上设有第二磁吸块;
20.在摆臂上通过固定架设有第一磁吸块,第一磁吸块与第二磁吸块构成具有间隙的磁吸固定结构。
21.优选的方案中,匀捻器的结构为:第二并捻座与摆臂固定连接,第二并捻架与第二并捻座可转动的连接,在第二并捻架的底部设有第二并捻盘,在第二并捻盘的外缘位置设有用于穿入外纱的第二外纱瓷眼,在第二并捻盘的中心位置设有用于穿入内纱的第二内纱瓷眼;
22.在第二并捻盘的上方设有第二并捻立柱,第二并捻立柱的上方设有导纱管;
23.在第二并捻立柱设有可转动的第一绕线轮和可转动的第二绕线轮。
24.优选的方案中,在第一绕线轮内设有阻尼结构,所述的阻尼结构包括毛毡轴套结构,滑动轴套结构或磁阻尼结构;
25.或者第二内纱瓷眼为单向阀式内纱张力器。
26.优选的方案中,在第一绕线轮内设有阻尼结构,销与第二并捻立柱连接,在销上设有第一轴套,在第一绕线轮内设有第二轴套,第二轴套与第一轴套套接并设有间隙,在第二轴套上设有磁吸组,在第一轴套上设有磁吸层,磁吸组与磁吸层之间构成磁阻尼结构。
27.另一可选的方案中,一种内纱自动上纱避让装置,它包括用于避让机械臂的避让机构和锭罐;
28.所述的避让机构的气缸座与捻线机机架固定连接,气缸座与伸缩气缸的缸体固定连接,伸缩气缸的活塞杆与匀捻器连接,避让机构使匀捻器在与锭罐轴线对齐和离开锭罐外缘的两种状态之间切换;
29.所述的锭罐与捻线机机架连接,锭罐位于匀捻器伸出极限位置的下方,锭罐的顶部开放以便于能够放入内纱卷装。
30.优选的方案中,所述的伸缩气缸的缸体轴线与捻线机机架之间为非90
°
的夹角,伸缩气缸的一部分穿过当前工位的捻线机机架,进入到相对的另一工位的空间。
31.本实用新型提供了一种内纱自动上纱避让装置,通过采用以上的方案,能够通过设置的避让机构克服了现有技术中匀捻器和内纱张紧器安装在锭罐顶部给内纱上纱带来的技术难题。设置的电磁擒纵机构结构简单方便,大幅降低控制难度。设置的电机驱动装
置,能够实现自动化的驱动摆臂摆动,采用气动伸缩的机构,能够利用现有的气源,且节省内部空间。采用本实用新型能够实现利用上纱机器人自动上内纱。
附图说明
32.下面结合附图和实施例作进一步说明。
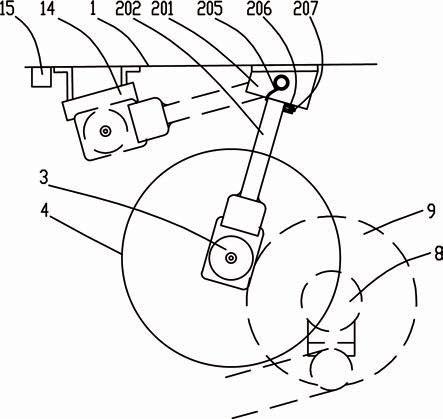
33.图1为本实用新型的避让机构的俯视图。
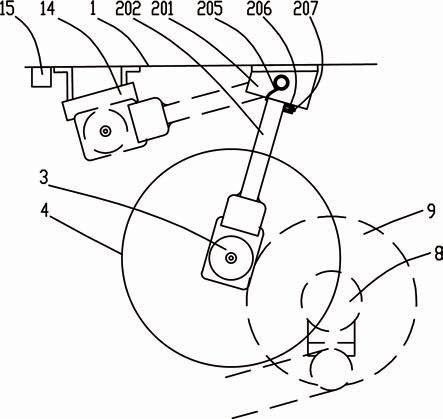
34.图2为本实用新型的避让机构另一优选结构的俯视图。
35.图3为本实用新型的整体结构示意图。
36.图4为本实用新型的捻线机的结构示意图。
37.图5为本实用新型的避让机构的结构示意图。
38.图6为本实用新型的避让机构的另一优选的结构示意图。
39.图7为图6中匀捻器的侧视图。
40.图8为本实用新型的避让机构的另一优选的结构示意图。
41.图9为本实用新型的避让机构另一优选结构的俯视图。
42.图中:捻线机机架1,避让机构2,摆动座201,摆臂202,固定架203,第一磁吸块204,复位弹簧205,限位块206,缓冲气弹簧207,转轴208,第一齿轮209,同步带210,第二齿轮211,霍尔电机212,伸缩气缸213,气缸座214,匀捻器3,内纱张力器301,第一并捻座302,导纱管303,第一并捻立柱304,第一并捻盘305,内纱张力座306,第二磁吸块307,第二并捻座308,第二并捻盘309,第一绕线轮310,第二绕线轮311,第二并捻立柱312,第一外纱瓷眼313,第一内纱瓷眼314,第二外纱瓷眼315,第二内纱瓷眼316,单向阀式内纱张力器317,螺纹端盖318,压簧319,压球320,第一并捻架31,第二并捻架32,锭罐4,捻线锭子机构5,内纱6,外纱7,机械臂8,内纱卷装9,avg小车10,外纱张力器11,超喂装置12,外纱卷装13,电磁擒纵机构14,接近传感器15,捻线机16,上纱机器人17。
具体实施方式
43.实施例1:
44.如图1~4中,一种内纱自动上纱避让装置,它包括用于避让机械臂8的避让机构2和锭罐4;
45.所述的避让机构2的摆动座201与捻线机机架1固定连接,摆动座201与摆臂202可转动的连接,在摆臂202的自由端设有匀捻器3,避让机构2使匀捻器3在与锭罐4轴线对齐和离开锭罐4外缘的两种状态之间切换;
46.所述的锭罐4与捻线机机架1连接,锭罐4位于匀捻器3一个极限位置的下方,锭罐4的顶部开放以便于能够放入内纱卷装9。所述的上纱机器人17设有avg小车10,avg小车10的顶部设有机械臂8,机械臂8用于抓取内纱卷装9在避让机构2使匀捻器3离开锭罐4外缘时,将内纱卷装9放入到锭罐4内。由此结构,实现利用上纱机器人17给锭罐4自动上纱。降低劳动强度,提高智能化程度。使用时,上纱机器人17运行到捻线机的工位附近,避让机构2主动或被动的摆动使匀捻器3离开锭罐4的顶部,上纱机器人17先从锭罐4取出卷筒,然后将内纱卷装9放入锭罐4。
47.优选的方案如图1中,在摆臂202旋转极限位置附近的捻线机机架1上设有电磁擒
纵机构14,在电磁擒纵机构14的壳体设有与摆臂202或匀捻器3相耦合的结构,优选的方案中,所述的电磁擒纵机构14内设有电磁铁。电磁擒纵机构14用于暂时的吸附摆臂202或匀捻器3,并在一段时间后释放摆臂202或匀捻器3;所述的一段时间足以上纱机器人17完成取出卷筒并放入内纱卷装9的操作。
48.摆臂202通过转轴208与摆动座201连接,在转轴208设有复位弹簧205,用于使摆臂202自由端的匀捻器3复位至锭罐4的正上方;
49.还设有接近传感器15,接近传感器15用于检测摆臂202的旋转位置。接近传感器15可选的采用光电传感器、磁传感器或接触开关,用于根据接近传感器15的信号启用电磁擒纵机构14。由此结构,由上纱机器人17的机械臂8推动摆臂202摆动,由电磁擒纵机构14将摆臂202锁定,从而实现避让,然后再放入内纱卷装9。
50.优选的方案如图2中,摆臂202与转轴208固定连接,转轴208与摆动座201可转动的连接,在摆动座201或捻线机机架1上设有电机,电机通过传动机构与转轴208连接,以驱动摆臂202旋转;优选的,电机采用霍尔电机212,通过电机内置的霍尔传感器,反馈电机的转角,从而控制摆臂202的转动角。传动机构包括固定安装在转轴208上的第一齿轮209,安装在电机上的第二齿轮211,第一齿轮209与第二齿轮211之间通过同步带210连接。由此结构,通过霍尔电机212驱动摆臂202摆动,实现摆臂202的自动避让。
51.还设有接近传感器15,接近传感器15用于检测上纱机器人17、机械臂8或内纱卷装9的接近;接近传感器15优选采用光电传感器或磁传感器。由此结构,实现自动避让内纱上纱位置。
52.或者还设有称重传感器,称重传感器用于检测内纱卷装9的重量,当低于预设值,则用于启动电机,驱动摆臂202旋转。由此结构,实现缺纱信号以及摆臂202自动避让同时进行。
53.优选的方案如图1、2中,在摆动座201上还设有限位块206,限位块206用于将匀捻器3的摆动位置限定在锭罐4的正上方。由此结构,提高定位精度。
54.优选的方案如图1、2中,在摆动座201上还设有缓冲气弹簧207,用于缓冲摆臂202的转动冲击。
55.优选的方案如图5中,匀捻器3的结构为:第一并捻座302与摆臂202固定连接,第一并捻架31与第一并捻座302可转动的连接,第一并捻座302上设有第一并捻盘305,在第一并捻盘305的外缘位置设有用于穿入外纱7的第一外纱瓷眼313,在第一并捻盘305的中心位置设有用于穿入内纱6的第一内纱瓷眼314,在第一并捻架31的顶部位置设有用于合捻的导纱管303;
56.内纱张力座306与第一并捻盘305可转动的连接,内纱张力器301与内纱张力座306固定连接,在内纱张力座306上设有第二磁吸块307;
57.在摆臂202上通过固定架203设有第一磁吸块204,第一磁吸块204与第二磁吸块307构成具有间隙的磁吸固定结构。第一磁吸块204和第二磁吸块307为一组环形或条形的磁铁,在互相吸引的两端,第一磁吸块204和第二磁吸块307各自的磁性相反。由此结构,匀捻器3能够跟随摆臂202一起位移,从而避开对内纱上纱的干涉。而且在匀捻器3即可完成对内纱6的张力加持,以及内纱6和外纱7的合捻,如图3~5中所示。在捻线时,外纱7从第一外纱瓷眼313穿入,内纱6绕过内纱张力器301被施加张力后从第一内纱瓷眼314穿入,在第一并
捻立柱304的位置合捻,外纱7在捻线锭子机构5的带动下以3000~10000转/分钟的速度旋转。并带动第一并捻架31旋转,而第一磁吸块204和第二磁吸块307互相吸引,使内纱张力座306固定不旋转。内纱张力器301为现有技术。例如中国专利文献 cn201883208u一种内纱张力器与锭子的组件中记载的结构。由于内纱张力器301都集成在匀捻器3上,使避让机构2的动作能够实现。
58.优选的方案如图6、7中,匀捻器3的结构为:第二并捻座308与摆臂202固定连接,第二并捻架32与第二并捻座308可转动的连接,在第二并捻架32的底部设有第二并捻盘309,在第二并捻盘309的外缘位置设有用于穿入外纱7的第二外纱瓷眼315,在第二并捻盘309的中心位置设有用于穿入内纱6的第二内纱瓷眼316;
59.在第二并捻盘309的上方设有第二并捻立柱312,第二并捻立柱312的上方设有导纱管303;
60.在第二并捻立柱312设有可转动的第一绕线轮310和可转动的第二绕线轮311。由此结构,与上例的匀捻器结构相比,无需额外的设置内纱张力座306和第一磁吸块204、第二磁吸块307的结构,简化了结构。
61.优选的方案中,在第一绕线轮310内设有阻尼结构,所述的阻尼结构包括毛毡轴套结构,滑动轴套结构或磁阻尼结构;设置的阻尼结构,用于将张力施加在内纱6上。
62.或者第二内纱瓷眼316为单向阀式内纱张力器317。单向阀式内纱张力器322是设置在第二内纱瓷眼316内的椭圆形或圆形的压球324,压球之后设有压簧323,还设有螺纹端盖325,用于调节压簧的压力,内纱6从单向阀式内纱张力器322的瓷眼穿入后,压球压在内纱6上,并将张力施加给内纱6。该方案的优点是结构更加简单,而且张力可调。
63.实施例2:
64.与实施例1中不同的,另一可选的方案如图9中,一种内纱自动上纱避让装置,它包括用于避让机械臂8的避让机构2和锭罐4;
65.所述的避让机构2的气缸座214与捻线机机架1固定连接,气缸座214与伸缩气缸213的缸体固定连接,伸缩气缸213的活塞杆与匀捻器3连接,避让机构2使匀捻器3在与锭罐4轴线对齐和离开锭罐4外缘的两种状态之间切换;
66.所述的锭罐4与捻线机机架1连接,锭罐4位于匀捻器3伸出极限位置的下方,锭罐4的顶部开放以便于能够放入内纱卷装9。
67.优选的方案中,所述的伸缩气缸213的缸体轴线与捻线机机架1之间为非90
°
的夹角,伸缩气缸213的一部分穿过当前工位的捻线机机架1,进11入到相对的另一工位的空间。
68.实施例2:
69.在实施例1的基础上,如图1所示,一种采用上述的内纱自动上纱避让装置的上纱方法,包括以下步骤:
70.s1、上纱机器人17获取上纱指令,可以是由捻线机发出的,也可以是现场总控服务器发出的,上纱机器人17移动至捻线机16的相应需要上内纱卷装9的工位;
71.s2、优选的,机械臂8先取出之前的内纱管筒,可以在该步骤时,即推动摆臂202旋转,直至摆臂202被电磁擒纵机构14吸附;
72.机械臂8抓取内纱卷装9,移动至工位的锭罐4上方;
73.s3、机械臂8推动摆臂202旋转,直至摆臂202被电磁擒纵机构14吸附;另一可选的
方案中,在机械臂8的前端,设有两个机械爪,分别用于抓取内纱管筒,和抓取内纱卷装9。由此方案,仅需一次动作,即可同时完成推动摆臂202旋转、拿取内纱管筒,放入内纱卷装9的操作。
74.s4、机械臂8将内纱卷装9放入到锭罐4内;
75.s5、上纱机器人17离开当前工位,在一个预设时间段之后,电磁擒纵机构14释放摆臂202,直至匀捻器3复位至锭罐4的正上方;另一可选的方案,也可以通过设置的接近传感器15来检测摆臂202的靠近或离开,以控制电磁擒纵机构14的得电吸附,失电释放。
76.通过以上步骤实现内纱卷装9的自动上纱。
77.实施例3:
78.在实施例1的基础上,如图2所示,一种采用上述的内纱自动上纱避让装置的上纱方法,包括以下步骤:
79.s01、上纱机器人17获取上纱指令,移动至捻线机16的相应工位;
80.机械臂8先取出之前的内纱管筒。另一可选的方案中,在机械臂8的前端,设有两个机械爪,分别用于抓取内纱管筒,和抓取内纱卷装9。
81.s02、机械臂8抓取内纱卷装9,移动至工位的锭罐4上方;
82.s031、接近传感器15检测到上纱机器人17、机械臂8或内纱卷装9的接近,电机驱动摆臂202旋转,匀捻器3避开锭罐4顶部的空间位置;
83.或者伸缩气缸213动作,活塞杆缩回,匀捻器3避开锭罐4顶部的空间位置;
84.s032、或者与s31并列的,称重传感器检测内纱卷装9的重量,当低于预设值,电机驱动摆臂202旋转,或者伸缩气缸213动作缩回,匀捻器3避开锭罐4顶部的空间位置;优选的,电机为霍尔电机212,能够控制摆臂202旋转预设的转角。采用称重的方式,能够减少因人员移动导致的接近传感器15的误触发,而影响生产。
85.s04、机械臂8将内纱卷装9放入到锭罐4内;
86.s05、上纱机器人17离开当前工位,电机驱动摆臂202旋转,或者伸缩气缸213动作伸出,直至匀捻器3复位至锭罐4的正上方;
87.通过以上步骤实现内纱卷装9的自动上纱。
88.上述的实施例仅为本实用新型的优选技术方案,而不应视为对于本实用新型的限制,本实用新型的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。