1.本实用新型属于机器人制作领域,尤其涉及一种电子琴弹奏机器人。
背景技术:
2.在国内能创制机器人乐队很少,因难度很大,工艺繁琐,基本都是大企业,大学校等组织成各方面的精通的团队花费很长时间才能制作成功,但是制作成本高,实用性低,不适用于民间使用、参观以及展出。
技术实现要素:
3.鉴于此,本实用新型的目的在于,提供一种电子琴弹奏机器人。
4.为了达到上述目的,进而采取的技术方案如下:
5.一种电子琴弹奏机器人,包括人体模型躯干,还包括安装在人体模型躯干内、用于摆动手臂的第一机构和用于控制左右手指按压电子琴的第二机构,以及用于驱动第一机构的驱动装置;
6.第一机构,包括转动安装在人体模型躯干右肩部上的转轴,而人体模型躯干的右手臂固定设置在转轴上,所述转轴外壁上固定焊接有第一u型环,所述第一u型环内穿设有第一连杆,所述第一连杆固定焊接在中转板一端,所述中转板另一端固定焊接有第二连杆,同时,中转板中间位置转动安装在人体模型躯干内,所述第二连杆上端穿设在第二u型环内,所述第二u型环内另一端与颈部转杆连接,所述颈部转杆转动向上安装在人体模型躯干颈部位置,此外,所述颈部转杆上端安装有人体模型躯干的头部;
7.第二机构,包括控制器,所述控制器与分别安装在人体模型躯干上的左右手臂上的电磁控制器电性连接,所述电磁控制器分别与对应的五个手指连接,所述手指呈弯曲状,手指根部转动安装在手掌上,同时,电磁控制器通过拉线分别与手指近关节中间位置连接,用于拉动手指的转动;
8.驱动装置,包括用于放置电子琴且安装在人体模型躯干面前的框架,所述框架一侧水平且并排安装有螺杆和导向杆,所述螺杆一端与安装在框架上的第一电机连接,所述螺杆上安装有导向块,同时,导向块滑动穿设在导向杆上,所述导向杆上安装有第三u型环,所述第三u型环内穿设有第三连杆,所述第三连杆向上固定安装在手掌上,用于调整人体模型躯干的手指在电子琴的位置;
9.此外,所述控制器还与第一电机连接。
10.作为本实用新型进一步的改进,所述控制器包括圆形转盘,所述转盘上均匀设置有若干同中心的接通圈,相邻所述接通圈之间通过圆形凹槽分割开来,所述接通圈的表面熔焊有若干用于控制驱动装置和电磁控制器的接通点,所述转盘的中心位置指针式转动安装有连接转杆,所述连接转杆上依次安装有与各个接通圈相对应接触的接触片,所述连接转杆与安装在转盘另一侧中心和电源连接的第二电机输出端连接,其中的一个所述接触片为常开点,其他接触片相对应的接触点分别与其控制的第一电机和电磁控制器电性连接。
11.作为本实用新型进一步的改进,所述转盘采用紫铜板制成。
12.作为本实用新型进一步的改进,所述中转板通过转动底座固定设置在人体模型躯干内。
13.本实用新型的有益效果是:
14.1.制作费用低,独立性强,原创独特;
15.2.该机器人可以深入宣传文化、科技、艺术,可应用范围较广:可以出入高端庆典场所;参与旅游景点、庙会婚庆、开业博览会等专场的布置;可助兴民族传统节日的活动;
16.3.传统音乐与现代智能的结合让生活中增加更多的乐趣。
附图说明
17.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
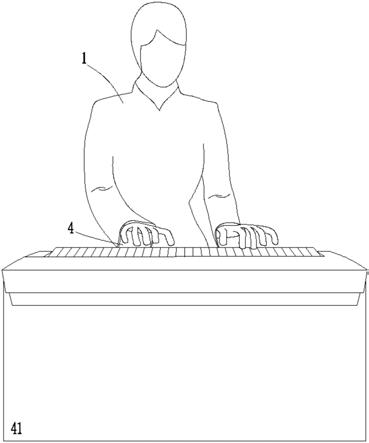
18.图1为本实用新型结构示意图;
19.图2为本实用新型中涉及第一机构和第二机构的结构示意图;
20.图3为本实用新型中涉及第一机构的结构示意图;
21.图4为本图3中的局部放大图;
22.图5为本实用新型中涉及第二机构和驱动装置的连接结构示意图;
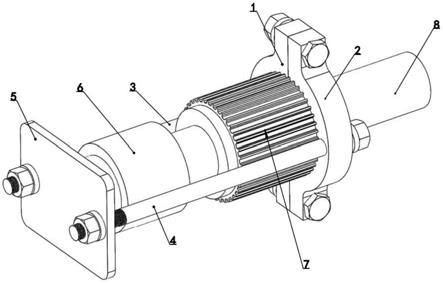
23.图6为图5中涉及驱动装置的结构示意图;
24.图7为本实用新型中涉及驱动装置的俯视图;
25.图8为本实用新型中涉及控制器的结构示意图;
26.图9为本实用新型中涉及连接转杆、接触片和接通点的组装示意图。
具体实施方式
27.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
28.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
29.请参考图1
‑
9:
30.一种电子琴弹奏机器人,包括人体模型躯干1,还包括安装在人体模型躯干1 内、用于摆动手臂的第一机构2和用于控制左右手指33按压电子琴的第二机构3,以及用于驱动第一机构2的驱动装置4;
31.第一机构2,包括转动安装在人体模型躯干1右肩部上的转轴21,而人体模型躯干1的右手臂固定设置在转轴21上,所述转轴21外壁上固定焊接有第一u型环22,所述第一u型环22内穿设有第一连杆23,所述第一连杆23固定焊接在中转板24一端,所述中转板24另一端固定焊接有第二连杆25,同时,中转板24中间位置通过转动底座26转动安装在人体模型
躯干1内,所述第二连杆25上端穿设在第二u型环27内,所述第二u型环27内另一端与颈部转杆28 连接,所述颈部转杆28转动向上安装在人体模型躯干1颈部位置,此外,所述颈部转杆28上端安装有人体模型躯干1的头部;
32.第二机构3,包括控制器31,所述控制器31与分别安装在人体模型躯干1 上的左右手臂上的电磁控制器32电性连接,所述电磁控制器32分别与对应的五个手指33连接,所述手指33呈弯曲状,手指33根部转动安装在手掌上,同时,电磁控制器32通过拉线34分别与手指33近关节中间位置连接,用于拉动手指33的转动;
33.驱动装置4,包括用于放置电子琴且安装在人体模型躯干1面前的框架41,所述框架41一侧水平且并排安装有螺杆42和导向杆43,所述螺杆42一端与安装在框架41上的第一电机44连接,所述螺杆42上安装有导向块45,同时,导向块45滑动穿设在导向杆43上,所述导向杆43上安装有第三u型环46,所述第三u型环46内穿设有第三连杆47,所述第三连杆47向上固定安装在手掌上,用于调整人体模型躯干1的手指33在电子琴的位置;同时,带动人体模型躯干1 的头部跟随手部的转动而转动。
34.此外,所述控制器31还与第一电机44连接。
35.所述控制器31包括圆形转盘311,所述转盘311采用紫铜板制成,所述转盘311上均匀设置有若干同中心的接通圈312,相邻所述接通圈312之间通过圆形凹槽313分割开来,所述接通圈312内熔焊有若干用于控制驱动装置4和电磁控制器32的接通点314,接通点314的数目根据曲目而定,所述转盘311中心指针式转动安装有连接转杆315,所述连接转杆315上依次安装有与各个接通圈312相对应接触的接触片316,所述连接转杆315与安装在转盘311另一侧中心的第二电机317输出端连接,其中的一个所述接触片316为常开点,并与电源的火线连接,剩余接触片316串联与电源零线连通,所述转盘311另一侧面通过电线将接通点314与第一电机44和电磁控制器32电性连接,还有,作为常开点的一圈接通圈312上不设置接通点314,以及,转盘311背面设置有与接通点314连接的线圈,并通过线圈分别与第一电机44和电磁控制器32接通;
36.此外,针对本实用新型中的,采用四圈接通圈312即可,第一圈接通圈312 上的接通点314用于控制右手手指按压琴键的乐普节奏,第二圈接通圈312上的接通点314用于控制左手按压琴键配拍,第三圈接通圈312上的接通点314 用于控制右手左右滑行,第四圈接通圈312为常开点,用于电源的接通。
37.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。