1.本实用新型涉及钻采设备技术领域,具体的说是一种用于处置管具的多关节机械臂。
背景技术:
2.目前钻机常规管具处理作业由多人配合,主要依靠较为落后的人力作业模式,作业频度大,钻井工的劳动强度高,尤其是起下钻作业时。钻井平台部分配套了半自动化二层台管具处理机械手,也只能与钻台面扶正机械手分步配合作业,无法实现排管协同作业,工作效率低,存在一定的安全隐患。
技术实现要素:
3.本实用新型的目的是提供一种用于处置管具的多关节机械臂,实现管具的无人化、机械化排放,替代人工实现排管协同作业,提高工作效率,降低排管作业的安全风险。
4.为达到上述目的,本实用新型所采取的技术方案为:
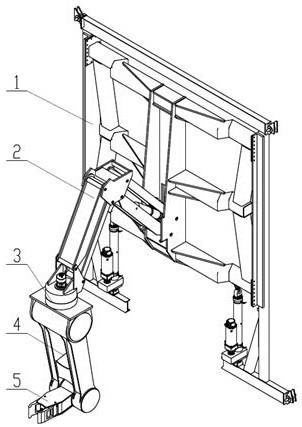
5.一种用于处置管具的多关节机械臂,包括支撑架、伸缩臂、回转关节、摆动臂和夹持钳,伸缩臂的后端安装在支撑架上,伸缩臂的前端通过回转关节与摆动臂的顶端相连接,夹持钳安装在摆动臂的底端;
6.伸缩臂包括相互平行的后主臂和后辅臂及相互平行的前主臂和前辅臂,后主臂和后辅臂的后端分别铰接在支撑架中部的臂体支架的下部,后主臂和后辅臂的前端分别铰接在后连接座上,前主臂和前辅臂的后端分别铰接在后连接座上,前主臂和前辅臂的前端均与前连接座相铰接;伸缩电动缸的底座铰接在臂体支架的下部,伸缩电动缸的活塞端与后主臂相铰接;前主臂与后主臂之间铰接有伸缩连杆。
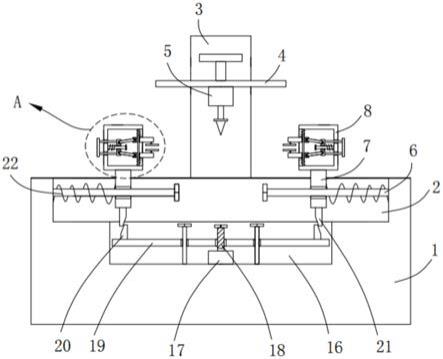
7.优选的,所述回转关节包括回转座、伺服回转电机和回转减速器,回转减速器的上端法兰与前连接座相连接,回转减速器的下端法兰与回转座相连接,回转减速器的输入轴与伺服回转电机相连接,伺服回转电机固定在前连接座上。
8.优选的,所述摆动臂包括摆动臂本体和摆动减速器,摆动臂本体的顶端与回转关节的底部相铰接,摆动臂本体与摆动减速器相铰接,摆动减速器的输入轴与伺服摆动电机相连接,伺服摆动电机固定在回转关节的底部。
9.优选的,所述夹持钳包括壳体和两个钳头,两个钳头通过销轴对称铰接在壳体的前端左右两侧,两个钳头分别通过夹持连杆与滑块相铰接,滑块安装在丝杠的前部,丝杠的尾端与夹持减速器相连接,夹持减速器的输入轴与伺服夹持电机相连接,伺服夹持电机固定在壳体上。
10.优选的,所述支撑架通过门字形框架结构的安装座固定在井架上,安装座的两根立柱的内侧分别固定有滑轨,立柱的底部分别安装有支脚,两个滑轨之间安装有托架,托架包括三根相互平行的横梁,下部的横梁与支脚之间安装有支撑电动缸。
11.优选的,所述托架的中部安装有竖直的臂体支架,臂体支架固定在横梁上,臂体支
架的尺寸与伸缩臂回缩成竖直状态时的尺寸相适配。
12.优选的,相邻的所述横梁之间安装有斜支撑杆。
13.优选的,所述回转减速器为重型行星减速机。
14.优选的,所述摆动减速器和夹持减速器为重型行星减速机。
15.以将井口钻杆排放至指定二层台指梁内的作业过程为例,说明本实用新型的工作过程:
16.钻杆在井口位置,电控系统上电后,系统自动识别选择可以排放钻杆的指梁位置,在电控系统控制下,摆动机械臂在摆动减速器作用下前移,并打开夹持钳,夹持钳伸展到位后,夹持钳通过伺服夹持电机实施夹持钻杆动作,夹持钳夹住钻杆后摆动机械臂后移至回转中心,通过伺服回转电机控制回转关节转动,夹持钻杆一侧转向远离井口一侧,钻杆运动轨迹为二层台舌台中线位置,此时二层台舌台为向上翻起状态。此时,伸缩臂中的伸缩电动缸推动后主臂和前主臂向前伸出,摆动臂随回转关节转动至指定指梁一侧,夹持钳保持夹持状态并保持水平;伺服摆动电机带动摆动臂前摆将钻杆送至指定指梁位置,支撑电动缸收缩,托架沿滑轨下移,带动伸缩臂和摆动臂将钻杆放入立根盒内,控制伺服夹持电机反向转动,打开夹持钳,随后控制摆动臂后摆、回转、伸缩臂收缩,夹持钳移动至井口等待位置,进行下一根立根排放作业。
17.本实用新型通过夹持管柱的方式进行管柱排放作业,排放过程中钻杆立根底部与立根盒不接触,无需先将钻杆立根下端放至立根盒内再进行钻杆立根上端的移动,可实现一键式排放作业,大大缩短了钻井作业周期。替代了人工作业,降低了安全风险。
18.本实用新型通过伸缩臂、回转关节、摆动臂和夹持钳可以实现钻具的移运、排放作业,伸缩臂在伺服伸缩电动缸的作用下可将夹持钳准确移动至管具附近;回转关节在伺服回转电机的作用下,能够使摆动臂和夹持钳360
°
转动;摆动臂在伺服摆动电机的作用下实现了夹持钳及所加持管具位置的精确调整;夹持钳在伺服夹持电机的驱动下能够精确地实现两个钳头的闭合和张开作业;通过支撑电动缸的伸缩,可以调整所加持管具的高度,适用于钻台不同工位的需要。本实用新型中各关键部件动作灵敏、协调,作业效率高。
19.本实用新型结构紧凑、占用空间小,减小了对二层台的压力。
附图说明
20.图1是本实用新型的结构示意图;
21.图2是图1中支撑架的结构示意图;
22.图3是图1中伸缩臂的结构示意图;
23.图4是图1中回转关节的结构示意图;
24.图5是图1中摆动臂的结构示意图;
25.图6是图1中夹持钳的结构示意图;
26.图7是图1中夹持钳的立体图;
27.图中:1、支撑架,101、安装架,102、滑轨,103、托架,104、支撑电动缸,105、臂体支架,106、横梁,107、斜支撑杆,108、支脚,2、伸缩臂,201、伸缩电动缸,202、后辅臂,203、后主臂,204、后连接座,205、伸缩连杆,206、前辅臂,207、前主臂,208、前连接座,3、回转关节,301、伺服回转电机,302、回转减速器,303、回转座,4、摆动臂,401、摆动臂本体,402、摆动减
速器,403、伺服摆动电机,5、夹持钳,501、壳体,502、滑块,503、钳头,504、伺服夹持电机,505、夹持减速器,506、丝杠,507、夹持连杆。
具体实施方式
28.以下结合附图对本实用新型进行详细说明。
29.如图1至图7所示,一种用于处置管具的多关节机械臂,包括支撑架1、伸缩臂2、回转关节3、摆动臂4和夹持钳5,伸缩臂2的后端安装在支撑架1上,伸缩臂2的前端通过回转关节与摆动臂4的顶端相连接,夹持钳5安装在摆动臂4的底端;
30.伸缩臂2包括相互平行的后主臂203和后辅臂202及相互平行的前主臂207和前辅臂206,后主臂203和后辅臂202的后端分别铰接在支撑架1中部的臂体支架105的下部,后主臂203和后辅臂202的前端分别铰接在后连接座204上,前主臂207和前辅臂206的后端分别铰接在后连接座204上,前主臂207和前辅臂206的前端均与前连接座208相铰接;伸缩电动缸201的底座铰接在臂体支架105的下部,伸缩电动缸201的活塞端与后主臂203相铰接;前主臂207与后主臂203之间铰接有伸缩连杆205。
31.回转关节3包括回转座303、伺服回转电机301和回转减速器302,回转减速器302的上端法兰与前连接座208相连接,回转减速器302的下端法兰与回转座303相连接,回转减速器302的输入轴与伺服回转电机301相连接,伺服回转电机301固定在前连接座208上。
32.摆动臂4包括摆动臂本体401和摆动减速器402,摆动臂本体401的顶端与回转关节3的底部相铰接,摆动臂本体401与摆动减速器402相铰接,摆动减速器402的输入轴与伺服摆动电机403相连接,伺服摆动电机403固定在回转关节3的底部。
33.夹持钳5包括壳体501和两个钳头503,两个钳头503通过销轴对称铰接在壳体501的前端左右两侧,两个钳头503分别通过夹持连杆507与滑块502相铰接,滑块502安装在丝杠506的前部,丝杠506的尾端与夹持减速器505相连接,夹持减速器505的输入轴与伺服夹持电机504相连接,伺服夹持电机504固定在壳体501上。
34.支撑架1通过门字形框架结构的安装座101固定在井架上,安装座101的两根立柱的内侧分别固定有滑轨102,立柱的底部分别安装有支脚108,两个滑轨102之间安装有托架103,托架103包括三根相互平行的横梁106,下部的横梁106与支脚108之间安装有支撑电动缸104。
35.托架103的中部安装有竖直的臂体支架105,臂体支架105固定在横梁106上,臂体支架105的尺寸与伸缩臂2回缩成竖直状态时的尺寸相适配。
36.相邻的横梁106之间安装有斜支撑杆107。
37.回转减速器302为重型行星减速机。摆动减速器402和夹持减速器505为重型行星减速机。
38.以将井口钻杆排放至指定二层台指梁内的作业过程为例,说明本实用新型的工作过程:
39.钻杆在井口位置,电控系统上电后,系统自动识别选择可以排放钻杆的指梁位置,在电控系统控制下,摆动机械臂4在摆动减速器403作用下前移,并打开夹持钳5,夹持钳5伸展到位后,夹持钳5通过伺服夹持电机504实施夹持钻杆动作,夹持钳5夹住钻杆后摆动机械臂4后移至回转中心,通过伺服回转电机301控制回转关节3转动,夹持钻杆一侧转向远离井
口一侧,钻杆运动轨迹为二层台舌台中线位置,此时二层台舌台为向上翻起状态。此时,伸缩臂2中的伸缩电动缸201推动后主臂203和前主臂207向前伸出,摆动臂4随回转关节3转动至指定指梁一侧,夹持钳5保持夹持状态并保持水平;伺服摆动电机403带动摆动臂4前摆,将钻杆送至指定指梁位置,支撑电动缸104收缩,托架103沿滑轨102下移,带动伸缩臂2和摆动臂4将钻杆放入立根盒内,控制伺服夹持电机504反向转动,打开夹持钳5,随后控制摆动臂4后摆、回转、伸缩臂收缩,夹持钳5移动至井口等待位置,进行下一根立根排放作业。
40.本实用新型通过夹持管柱的方式进行管柱排放作业,排放过程中钻杆立根底部与立根盒不接触,无需先将钻杆立根下端放至立根盒内再进行钻杆立根上端的移动,可实现一键式排放作业,大大缩短了钻井作业周期。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。