技术特征:
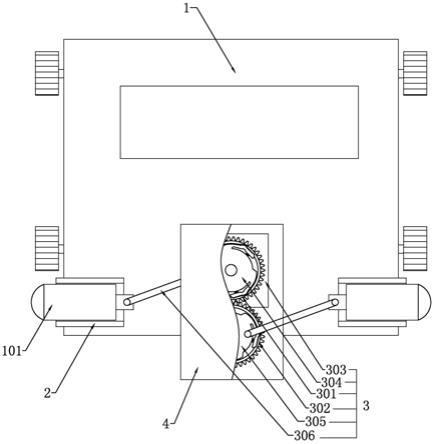
1.一种比赛机器人用障碍清除装置,其特征在于,包括:机器人本体(1),其能够移动和检测障碍物;两个滑动清障装置(2),其分别设在机器人本体(1)的两侧;驱动装置(3),其设在机器人本体(1)上,其用于驱动两个滑动清障装置(2)运动;其中,所述驱动装置(3)能单独驱动两个滑动清障装置(2)运动,在驱动装置(3)的驱动下,滑动清障装置(2)能够相对机器人本体(1)滑动清除障碍物。2.根据权利要求1所述的一种比赛机器人用障碍清除装置,其特征在于,还包括:防护装置(4),其可开启地设在驱动装置(3)外部,用于对驱动装置(3)进行保护。3.根据权利要求2所述的一种比赛机器人用障碍清除装置,其特征在于,所述驱动装置(3)包括:第一齿轮(301),其转动设在机器人本体(1)上,其端面上设有第一驱动槽(3011);第二齿轮(302),其转动设在第一齿轮(301)一侧,且其与第一齿轮(301)啮合连接,其端面上设有第二驱动槽;驱动源(303),其设在机器人本体(1)上,用于驱动第一齿轮(301)转动;第一从动轮(304),其设在第一驱动槽(3011)中,其端面上远离中心的位置设有第一连接部(3045);第二从动轮,其设在第二驱动槽中,其端面上远离中心的位置设有第二连接部;两个传动杆,两个所述传动杆的第一端分别与第一连接部(3045)和第二连接部连接,两个所述传动杆的第二端分别与两个滑动清障装置(2)连接;其中,第一齿轮(301)转动时会带动第二齿轮(302)沿反方向转动,当第一齿轮(301)朝第一方向转动时会带动第一从动轮(304)转动,当第一齿轮(301)朝第二方向转动时,第一从动轮(304)不被带动;第二齿轮(302)和第二从动轮的传动方式与第一齿轮(301)和第一从动轮(304)的传动方式相同,且当第一从动轮(304)被带动时第二从动轮不被带动。4.根据权利要求3所述的一种比赛机器人用障碍清除装置,其特征在于,所述第一从动轮(304)包括:从动轮本体(3041);若干个延伸部(3042),若干个所述延伸部(3042)沿从动轮本体(3041)周向间隔分布,每个延伸部(3042)的第一端与从动轮本体(3041)的侧壁连接,每个延伸部(3042)的第二端沿从动轮本体(3041)周向延伸,延伸部(3042)的第二端与从动轮本体(3041)侧壁之间具有间隙,且延伸部(3042)的第二端可以在外力的作用下靠近或者远离从动轮本体(3041)侧壁;其中,所述第一驱动槽(3011)侧壁上设有与延伸部(3042)的第二端相互配合的卡合槽(3012),当第一齿轮(301)朝第一方向转动时,延伸部(3042)第二端的端部与卡合槽(3012)侧壁相抵,此时第一齿轮(301)带动第一从动轮(304)转动,当第一齿轮(301)朝第二方向转动时,延伸部(3042)第二端的端部与卡合槽(3012)侧壁分离。5.根据权利要求4所述的一种比赛机器人用障碍清除装置,其特征在于,所述延伸部(3042)包括:第一传动部(3043),其设在延伸部(3042)第二端的端部;第二传动部(3044),其设在延伸部(3042)远离从动轮本体(3041)一侧的表面;
所述卡合槽(3012)包括:第一传动槽,其与第一传动部(3043)相适配;第二传动槽(30124),其与第二传动部(3044)相适配;其中,当第一齿轮(301)朝第一方向转动时,第一传动部(3043)与第一传动槽的侧壁相抵,第二传动部(3044)的与第二传动槽(30124)的侧壁相抵。6.根据权利要求2所述的一种比赛机器人用障碍清除装置,其特征在于,所述滑动清障装置(2)包括:固定套(201),其内部具有滑动槽(202);推块(101),其一端与滑动槽(202)滑动连接;安装套(203),其设在滑动槽(202)侧壁上,其内部具有安装槽(204);活动杆(205),其第一端滑动设在安装槽(204)中,其第二端与推块(101)连接;弹性元件(206),其第一端固定在安装槽(204)中,其第二端与活动杆(205)的第一端连接;其中,所述驱动装置(3)与推块(101)位于滑动槽(202)内的一端连接,所述安装套(203)、活动杆(205)、弹性元件(206)均有多个,且间隔分布在滑动槽(202)侧壁上。7.根据权利要求6所述的一种比赛机器人用障碍清除装置,其特征在于,还包括:固定架(207),其设在滑动槽(202)侧壁上;摆动杆(208),其第一端连接在固定架(207)上,其第二端连接在推块(101)上,其靠近中间的位置与活动杆(205)连接;其中,所述摆动杆(208)有多个,且沿推块(101)滑动方向间隔分布,在推块(101)滑动过程中,摆动杆(208)会发生摆动。8.根据权利要求2所述的一种比赛机器人用障碍清除装置,其特征在于,所述防护装置(4)包括:固定下壳(401),其包围在驱动装置(3)外部,其固定在机器人本体(1)上;活动上壳(402),其与固定下壳(401)相适配,其第一端与固定下壳(401)铰接,其第二端通过锁紧装置与固定下壳(401)连接;其中,当活动上壳(402)的第二端与固定下壳(401)连接时,活动上壳(402)能将驱动装置(3)覆盖住,所述锁紧装置能够将活动上壳(402)与固定下壳(401)锁定和释放。9.根据权利要求8所述的一种比赛机器人用障碍清除装置,其特征在于,所述锁紧装置包括:控制槽(501),其设在固定下壳(401)上表面;锁定槽(502),其设在活动上壳(402)底面与控制槽(501)相对的位置;活动杠杆(503),其中部与控制槽(501)转动连接,其第一端设有与锁定槽(502)相互配合的锁紧头(504);弹性支撑件(505),其设在控制槽(501)侧壁上靠近活动杠杆(503)第二端的位置,其一端与活动杠杆(503)接触;滑动解锁槽,其设在控制槽(501)侧壁上,其包括相互连通的第一解锁槽(5061)和第二解锁槽(5062);滑动解锁块(507),其与滑动解锁槽滑动连接,其一端与活动杠杆(503)的第二端接触;
其中,当滑动解锁块(507)位于第一解锁槽(5061)中时,弹性支撑件(505)将锁紧头(504)紧紧卡在锁定槽(502)中,当滑动解锁块(507)在第二解锁槽(5062)内向远离第一解锁槽(5061)方向滑动的过程中,锁紧头(504)从锁定槽(502)中退出。10.一种适于权利要求2
‑
9任意一项所述的比赛机器人用障碍清除装置的使用方法,其特征在于,包括下列步骤:s1、测试:开启防护装置(4),测试驱动装置(3)是否正常,正常状态下关闭防护装置(4);s2、行走检测:机器人本体(1)沿特定路线移动,当机器人本体(1)侧面被障碍物卡住时,停止移动,判断是哪一侧被卡住;s3、障碍清除:驱动装置(3)启动带动相应一侧的滑动清障装置(2)运动,对障碍物进行清除,障碍清除完成后继续进行移动。
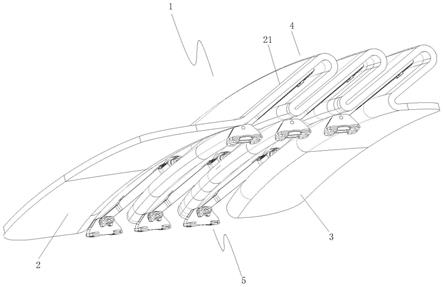
技术总结
本发明涉及一种比赛机器人用障碍清除装置,包括:机器人本体,其能够移动和检测障碍物;两个滑动清障装置,其分别设在机器人本体的两侧;驱动装置,其设在机器人本体上,其用于驱动两个滑动清障装置运动;其中,所述驱动装置能单独驱动两个滑动清障装置运动,在驱动装置的驱动下,滑动清障装置能够相对机器人本体滑动清除障碍物,通过上述方案,机器人在清除障碍时,可以有针对性的对障碍物进行清除,大大降低了清障过程中驱动装置的运行负荷,并且两个推块不容易同时被卡死,增加了机器人“逃生”的概率。的概率。的概率。
技术研发人员:朱龚雷
受保护的技术使用者:杭州小手宇宙信息咨询有限公司
技术研发日:2021.10.13
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。