1.本技术涉及汽车自动驾驶领域,尤其涉及一种汽车自动行驶方法及系统。
背景技术:
2.随着社会进步和发展,汽车持有量的增加,道路交通拥堵现象越来越严重,每年 发生的交通事故也在不断上升,越来越多的公司或科研机构都在研究自动驾驶。现有技术中心,汽车自动驾驶系统中,是基于获取的道路信息,来模拟行驶路径,但是在具体的行驶过程中,会有很多的突发情况,导致汽车的自动驾驶风险增加。
3.因此,现有技术还有待改进。
技术实现要素:
4.本技术的目的是提高汽车的自动行驶的安全性和准确性。
5.本技术的上述技术目的是通过以下技术方案得以实现的:本技术第一方面,公开了一种汽车自动行驶方法,其中,包括:与辅助车辆的车载终端建立通信连接;获取行驶实况信息;其中,行驶实况信息包括辅助车辆的行驶路径、行驶速度;基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶。
6.本技术上述方案,通过与辅助车辆建立通信连接,获取辅助车辆的行驶路径和行驶速度,与辅助车辆保持安全距离,按照对应的速度行驶,通过跟随辅助车辆,实现自动驾驶,操作更加安全,精度也更高。
7.可选的,所述的汽车自动行驶方法,其中,获取行驶路况信息还包括:获取汽车行驶路径中的红绿灯信息;获取当前车辆与辅助车辆的车况信息,以及周边的车辆信息,其中车况信息包括油箱剩余油量或电池剩余电量或车辆故障信息。
8.本技术上述方案,通过获取红绿灯信息,以及车况信息,可以及时知晓车辆故障信息以及周边的车辆信息,并且通过获取红绿灯信息以及周边车辆信息,能够降低车辆行驶风险。
9.可选的,所述的汽车自动行驶方法,其中,基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶的步骤还包括:当辅助车辆在绿灯或黄灯情况下行驶过红绿灯,红绿灯跳变为红色,控制当前车辆停止运动,等待红绿灯跳变为绿灯;发送指令至辅助车辆,请求辅助车辆减速或在安全区域停车;当红绿灯跳变为绿灯时,在安全车速范围内,提高车速,按照辅助车辆的行驶路径行驶,直至与辅助车辆再次处于安全距离范围内,基于辅助车辆的行驶速度,按照对应行驶速度行驶。
10.本技术上述方案,在前车过红绿灯后,红绿灯跳变为红灯的情况下,控制当前车辆停止,并发送指令给辅助车辆,请求辅助车辆减速或安全区域停车,并在红绿灯跳变到绿灯时,提高车速,按照辅助车辆的行驶路径行驶,追上辅助车辆后再次保持安全距离行驶,针对上述场景,进行自动行驶控制,保证安全性。
11.可选的,所述的汽车自动行驶方法,其中,基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶的步骤还包括:当辅助车辆与当前车辆之间有车辆插入时,减缓行驶速度直至车辆插入完成;获取最后插入的车辆与当前车辆的距离,保持安全距离进行行驶;在辅助车辆与当前车辆之间的车辆移出后,提高行驶速度,直至与辅助车辆达到安全距离,基于辅助车辆的行驶速度,保持对应的速度行驶。
12.本技术上述方案,在辅助车辆与当前车辆之间有车辆插入时,减缓当前车辆的行驶速度,避免出现车祸,并且,在车辆插入后,与前车保持安全距离,在前车移出后,提高车速,直至与辅助车辆达到安全距离后再保持与辅助车辆的对应速度行驶,进一步的保证行车安全性。
13.可选的,所述的汽车自动行驶方法,其中,还包括:在当前车辆的油量或电量低于预定值或车辆故障时,发出警报信息至辅助车辆终端。
14.本技术上述方案,在当前车辆的动力源不足时,发出警报,提示辅助车辆,便于寻找加油站或充电站进行能源补给,保证车辆正常行驶。
15.可选的,所述的汽车自动行驶方法,其中,还包括:强制停车,获取强制停车指令,减缓行驶速度直至停止,并发送强制停车信息至辅助车辆的车载终端。
16.本技术上述方案,用户可以强制控制车辆停止,减缓行驶速度直至停止,并发送强制停车信息至辅助车辆的车载终端,便于在当前车辆出现故障,或前车出现车祸等情况,紧急停车。
17.本技术第二方面,公开了一种汽车自动行驶系统,其中,包括:通信模块,用于与辅助车辆的车载终端建立通信连接;实况获取模块,用于获取行驶实况信息;其中,行驶实况信息包括辅助车辆的行驶路径、行驶速度;行驶控制模块,用于基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶。
18.本技术上述方案,通过与辅助车辆建立通信连接,获取辅助车辆的行驶路径和行驶速度,与辅助车辆保持安全距离,按照对应的速度行驶,通过跟随辅助车辆,实现自动驾驶,操作更加安全,精度也更高。
19.可选的,所述的汽车自动行驶系统,其中,所述实况获取模块还用于获取汽车行驶路径中的红绿灯信息,以及获取当前车辆与辅助车辆的车况信息,以及周边的车辆信息,其中车况信息包括油箱剩余油量或电池剩余电量或车辆故障信息。
20.本技术上述方案,通过获取红绿灯信息,以及车况信息,可以及时知晓车辆故障信息以及周边的车辆信息,并且通过获取红绿灯信息以及周边车辆信息,能够降低车辆行驶
风险。
21.可选的,所述的汽车自动行驶系统,其中,还包括:警报模块,用于在当前车辆的油量或电量低于预定值或车辆故障时,发出警报信息至辅助车辆终端。
22.本技术上述方案,在当前车辆的动力源不足时,发出警报,提示辅助车辆,便于寻找加油站或充电站进行能源补给,保证车辆正常行驶。
23.可选的,所述的汽车自动行驶系统,其中,还包括:强制停车模块,用于获取强制停车指令,减缓行驶速度直至停止,并发送强制停车信息至辅助车辆的车载终端。
24.本技术上述方案,用户可以强制控制车辆停止,减缓行驶速度直至停止,并发送强制停车信息至辅助车辆的车载终端,便于在当前车辆出现故障,或前车出现车祸等情况,紧急停车。
25.综上所述,本技术公开了一种汽车自动行驶方法及系统,其中,所述方法包括:与辅助车辆的车载终端建立通信连接;获取行驶实况信息;其中,行驶实况信息包括辅助车辆的行驶路径、行驶速度;基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶,通过本技术所述方案,能够实现汽车的自动行驶,保证安全性的同时,自动行驶效果更佳。
附图说明
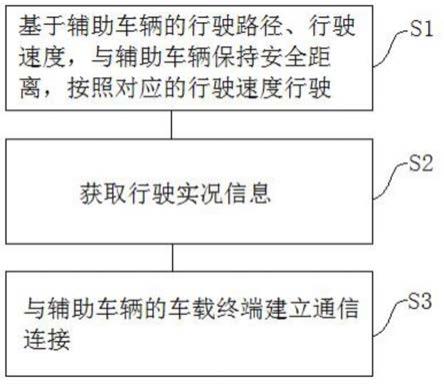
26.图1是本技术所述汽车自动行驶方法的步骤流程图。
27.图2是本技术所述汽车自动行驶方法的步骤s3的第一实施例的流程图。
28.图3是本技术所述汽车自动行驶方法的步骤s3的第二实施例的流程图。
29.图4是本技术所述汽车自动行驶系统的结构框图。
具体实施方式
30.以下结合附图1
‑
4对本技术作进一步详细说明。
31.本技术第一实施例,基于现有技术中的汽车自动驾驶,获取路况信息,预设路径,进行行驶的方式作出改进,公开了一种汽车自动行驶方法,参阅图1,为所述方法的步骤流程图,其中,包括:s1.与辅助车辆的车载终端建立通信连接;s2.获取行驶实况信息;其中,行驶实况信息包括辅助车辆的行驶路径、行驶速度;s3.基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶。
32.本技术实施例中,在具体实施时,包括自动行驶的车辆,还包括辅助车辆,自动行驶的车辆与辅助车辆的车载终端建立通信连接,实时进行信息交互,通过获取行驶实况信息,其中,包括辅助车辆的形式路径以及行驶速度,为了方便进行车速和路径控制,本技术实施例中,当前车辆获取到辅助车辆的行驶路径以及行驶速度后,保持一个安全距离,在安全距离范围内,与辅助车辆保持相对稳定的车速,如果辅助车辆加速,当前车辆也会适应性的加速,如果辅助车辆减速甚至停车,当前车辆也会减速甚至停车,确保与辅助车辆相对同
步,并且保证安全性,会在一个安全距离范围内行使,通过辅助车辆与当前车辆的实时信息交互,能够实时获取辅助车辆的行驶路径,在保持安全距离的情况下,按照辅助车辆的行驶路径进行自动驾驶,因为有辅助车辆在前面领路,保障了行驶的准确性,同时由于有参照目标,也保证了自动行驶的安全性。
33.前述方案提到了,在自动行驶过程中,会获取行驶路况信息,包括辅助车辆的行驶路径以及行驶速度,而在具体的行驶过程中,还会出现类似红绿灯,车祸等情况发生,因此,为了保证汽车行驶稳定性,及时获取行驶实况信息,本技术实施例中,进一步的,所述的汽车自动行驶方法,其中,获取行驶路况信息还包括:获取汽车行驶路径中的红绿灯信息;获取当前车辆与辅助车辆的车况信息,以及周边的车辆信息,其中车况信息包括油箱剩余油量或电池剩余电量或车辆故障信息。
34.本技术实施例中,除了获取辅助车辆的行驶路径以及行驶速度外,还能获取汽车行驶路径中的红绿灯信息,可以通过与交管部门等进行信息交互,保证路况安全性,同时,本技术实施例中,还能获取当前车辆与辅助车辆的车况信息,例如车辆故障信息或能耗信息,避免由于能耗过大,导致能源供给不足,无法行驶,同时,也会获取周边的车辆信息,避免出现车祸等情况发生。
35.前述方案提到了,在行驶过程中,还能够获取行驶路径中的红绿灯信息,在具体实施时,在经过红绿灯过程中,辅助车辆可能由于绿灯或黄灯状态下,过了红绿灯,红绿灯跳变为红色,此时当前车辆的自动行驶方案发生了变化,本技术实施例中,进一步的,所述的汽车自动行驶方法,参阅图2,为所述步骤s3的第一实施例的步骤流程图,其中,基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶的步骤还包括:s311.当辅助车辆在绿灯或黄灯情况下行驶过红绿灯,红绿灯跳变为红色,控制当前车辆停止运动,等待红绿灯跳变为绿灯;s312.发送指令至辅助车辆,请求辅助车辆减速或在安全区域停车;s313.当红绿灯跳变为绿灯时,在安全车速范围内,提高车速,按照辅助车辆的行驶路径行驶,直至与辅助车辆再次处于安全距离范围内,基于辅助车辆的行驶速度,按照对应行驶速度行驶。
36.本技术实施例中,在辅助车辆行驶过红绿灯后,红绿灯跳变为红色,此时,当前车辆应该停止前进,保证安全性和遵守交规,因此,控制当前车辆停止运动,等待红绿灯变为绿色,而在辅助车辆行驶过红绿灯时,当前车辆也会发送指令至辅助车辆,告知辅助车辆,当前车辆未过红绿灯,此时,为了保证当前车辆与辅助车辆的距离不至于过大,避免距离过大,跟车不稳定,本技术实施例中,当前车辆发送指令至辅助车辆,请求辅助车辆减速或在安全区域停车,待当前车辆过红绿灯后,再去追上辅助车辆,此时,辅助车辆停止或减缓行驶速度,当前车辆为了追上辅助车辆,需要提高车速,车速提高的范围不可过大, 需要在当前路段的安全车速范围内,按照辅助车辆的行驶路径进行行驶,直至当前车辆与辅助车辆再次处于安全距离范围内,此时减缓当前车辆的速度,直至与辅助车辆达到相对同步,本技术上述实施例,能够解决辅助车辆在过红绿灯后,红绿灯跳变为红灯的情况下,当前车辆的自动行驶,保证了自动驾驶安全性以及稳定性。
37.前述方案提到了,获取行驶实况信息除了红绿灯信息,辅助车辆的行驶信息等,还包括获取周边车辆信息,因此,为了进一步的保证安全性,本技术实施例中,所述的汽车自动行驶方法,其中,参阅图3,为所述步骤s3的第二实施例的步骤流程图,基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶的步骤还包括:s321.当辅助车辆与当前车辆之间有车辆插入时,减缓行驶速度直至车辆插入完成;s322.获取最后插入的车辆与当前车辆的距离,保持安全距离进行行驶;s323.在辅助车辆与当前车辆之间的车辆移出后,提高行驶速度,直至与辅助车辆达到安全距离,基于辅助车辆的行驶速度,保持对应的速度行驶。
38.本技术实施例中,在具体的汽车自动行驶过程中,会出现加塞的情况,也就是当前车辆与前车之间会存在侧方车辆插入的情况,而本技术实施例中,提到了,当前车辆与辅助车辆保持安全距离行驶,那么在侧方有车辆插入时,如果还是与辅助车辆保持安全距离,那么就会出现剐蹭,因此,为了避免出现这种情况,在判断有车辆插入时,减缓当前车辆的行驶速度,直至车辆插入完成,其中,减速到0也是减速,而判断是否车辆插入可以通过汽车侧边的雷达感应,车辆靠近的情况下,当前车辆减速,避免发生剐蹭,当雷达不报警时,则缓慢加速即可,在车辆插入后,此时,当前车辆的行驶路径仍然是辅助车辆的行驶路径,但是需要与前车保持安全距离进行行驶,而不是与辅助车辆保持安全距离,在行驶过程中,前方刚刚插入的车辆可能会移出,在前方车辆移出后,提高当前车辆的行驶速度,以使当前车辆与辅助车辆达到安全距离或者,在辅助车辆与当前车辆之间还存在其他车辆时,以最后一辆车为目标,保持安全距离行驶,在辅助车辆与当前车辆之间没有车辆时,再保持安全距离进行行驶。
39.前述方案中,还提到了获取车辆信息,包括能耗信息以及故障信息,因此,本技术实施例中,进一步的,所述的汽车自动行驶方法,其中,还包括:在当前车辆的油量或电量低于预定值或车辆故障时,发出警报信息至辅助车辆终端。
40.本技术实施例中,在当前车辆的油量或电量低于预定值或车辆故障,发出警报信息至辅助车辆,提示辅助车辆进入加油站或充电站进行加油或充电,或者在车辆故障时,停车,进行维修或等待拖车等。
41.本技术实施例中,在出现紧急情况时,例如紧急避让,需要紧急刹车,因此,本技术实施例中,进一步的,所述的汽车自动行驶方法,其中,还包括:强制停车,获取强制停车指令,减缓行驶速度直至停止,并发送强制停车信息至辅助车辆的车载终端。
42.本技术实施例中,除了能够基于辅助车辆实现自动行驶,还能输出强制停车指令,车辆获取强制停车指令后,减缓行驶速度直至停车,并且发送强制停车信息至辅助车辆的车载终端,保证了安全性。
43.本技术第二实施例,公开了一种汽车自动行驶系统,参阅图4,为所述系统的结构框图,其中,包括:通信模块100,用于与辅助车辆的车载终端建立通信连接;实况获取模块200,用于获取行驶实况信息;其中,行驶实况信息包括辅助车辆的
行驶路径、行驶速度;行驶控制模块300,用于基于辅助车辆的行驶路径、行驶速度,与辅助车辆保持安全距离,按照对应的行驶速度行驶。
44.本技术实施例中,通过通信模块与辅助车辆的车载终端建立通信连接,通过实况获取模块实时获取辅助车辆的行驶速度、行驶路径,通过行驶控制模块,控制当前车辆基于辅助车辆的行驶路径和行驶速度,与辅助车辆保持安全距离,按照对应的速度行驶,通过上述方案,能够实现汽车的自动驾驶,同时提高了自动驾驶的精准度和安全性。
45.进一步的,本技术实施例中,所述的汽车自动行驶系统,其中,所述实况获取模块还用于获取汽车行驶路径中的红绿灯信息,以及获取当前车辆与辅助车辆的车况信息,以及周边的车辆信息,其中车况信息包括油箱剩余油量或电池剩余电量或车辆故障信息。
46.本技术实施例中,实况获取模块还包括获取行驶路径中的红绿灯信息以及车辆的车况信息和周边车辆信息,保证信息的多样性,确保自动行驶的安全性。
47.具体的,所述行驶控制模块除了控制当前车辆,基于辅助车辆的行驶路径和行驶速度,保持安全距离行驶外,还包括:在辅助车辆行驶过红绿灯后,红绿灯跳变为红色,此时,当前车辆应该停止前进,保证安全性和遵守交规,因此,控制当前车辆停止运动,等待红绿灯变为绿色,而在辅助车辆行驶过红绿灯时,当前车辆也会发送指令至辅助车辆,告知辅助车辆,当前车辆未过红绿灯,此时,为了保证当前车辆与辅助车辆的距离不至于过大,避免距离过大,跟车不稳定,本技术实施例中,当前车辆发送指令至辅助车辆,请求辅助车辆减速或在安全区域停车,待当前车辆过红绿灯后,再去追上辅助车辆,此时,辅助车辆停止或减缓行驶速度,当前车辆为了追上辅助车辆,需要提高车速,车速提高的范围不可过大, 需要在当前路段的安全车速范围内,按照辅助车辆的行驶路径进行行驶,直至当前车辆与辅助车辆再次处于安全距离范围内,此时减缓当前车辆的速度,直至与辅助车辆达到相对同步,本技术上述实施例,能够解决辅助车辆在过红绿灯后,红绿灯跳变为红灯的情况下,当前车辆的自动行驶,保证了自动驾驶安全性以及稳定性。
48.并且进一步的,所述行驶控制模块还包括的具体功能还包括:当前车辆与前车之间会存在侧方车辆插入的情况,而本技术实施例中,提到了,当前车辆与辅助车辆保持安全距离行驶,那么在侧方有车辆插入时,如果还是与辅助车辆保持安全距离,那么就会出现剐蹭,因此,为了避免出现这种情况,在判断有车辆插入时,减缓当前车辆的行驶速度,直至车辆插入完成,其中,减速到0也是减速,而判断是否车辆插入可以通过汽车侧边的雷达感应,车辆靠近的情况下,当前车辆减速,避免发生剐蹭,当雷达不报警时,则缓慢加速即可,在车辆插入后,此时,当前车辆的行驶路径仍然是辅助车辆的行驶路径,但是需要与前车保持安全距离进行行驶,而不是与辅助车辆保持安全距离,在行驶过程中,前方刚刚插入的车辆可能会移出,在前方车辆移出后,提高当前车辆的行驶速度,以使当前车辆与辅助车辆达到安全距离或者,在辅助车辆与当前车辆之间还存在其他车辆时,以最后一辆车为目标,保持安全距离行驶,在辅助车辆与当前车辆之间没有车辆时,再保持安全距离进行行驶。
49.进一步的,所述的汽车自动行驶系统,其中,还包括:警报模块,用于在当前车辆的油量或电量低于预定值或车辆故障时,发出警报信
息至辅助车辆终端。
50.本技术实施例中,在当前车辆的油量或电量低于预定值或车辆故障,发出警报信息至辅助车辆,提示辅助车辆进入加油站或充电站进行加油或充电,或者在车辆故障时,停车,进行维修或等待拖车等。
51.进一步的,所述的汽车自动行驶系统,其中,还包括:强制停车模块,用于获取强制停车指令,减缓行驶速度直至停止,并发送强制停车信息至辅助车辆的车载终端。
52.本技术实施例中,除了能够基于辅助车辆实现自动行驶,还能输出强制停车指令,车辆获取强制停车指令后,减缓行驶速度直至停车,并且发送强制停车信息至辅助车辆的车载终端,保证了安全性。
53.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。