技术特征:
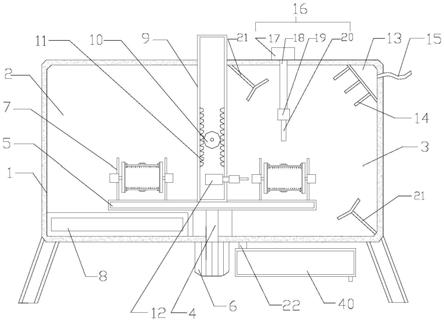
1.一种上模打磨装置,其特征在于:包括可调式打磨工位和打磨头组件以及控制系统;其中,所述可调式打磨工位包括纵向设置的第一矩形框,所述第一矩形框上端左右两侧对称设有第一滑轨,两个所述第一滑轨共同滑动连接有横向设置的第二矩形框;所述第二矩形框上端前后两侧对称设有第二滑轨,两个所述第二滑轨共同滑动连接有安装座,所述安装座装配有打磨机械臂,所述第一矩形框与所述第二矩形框之间设有纵向调节机构,所述第二矩形框设有横向调节机构,两个所述第一滑轨均设有第一限位组件,两个所述第二滑轨均设有第二限位组件;所述横向调节机构包括安装板、第一齿轮箱、第一电机、连接套、两个轴承座、丝杆以及丝杆套,两个所述轴承座内均安装有轴承,所述丝杆两端分别与两个轴承连接,所述丝杆左侧伸出位于左侧的所述轴承座与所述连接套固定连接,所述安装板设于所述第二矩形框左侧,所述第一齿轮箱设于所述安装板左侧,所述第一电机设于所述第一齿轮箱,且所述第一电机的输出轴与所述第一齿轮箱传动连接,所述第一齿轮箱的输出端贯穿所述安装板与所述连接套传动连接,所述连接套与所述安装板转动连接,所述丝杆套设于所述安装座下端,且所述丝杆套与所述丝杆传动连接;所述纵向调节机构包括齿条、第二齿轮箱、第二电机以及齿轮,所述齿条纵向设于所述第一矩形框左端框体的内侧,所述第二齿轮箱设于所述第二矩形框下侧,所述第二电机设于所述第二齿轮箱,且所述第二电机的输出轴与所述第二齿轮箱传动连接,所述齿轮与所述第二齿轮箱转动连接,且所述第二齿轮箱的输出端与所述齿轮传动连接,所述齿轮与所述齿条相啮合匹配;所述打磨机械臂的末端还安装有打磨头组件;所述打磨头组件包括打磨机构和吸尘组件;所述打磨机构用于对上模实施打磨处理,且所述吸尘组件用于对打磨处实施实时吸尘处理;所述控制系统用于对可调式打磨工位进行控制实现打磨机械臂位置调整处理;所述控制系统还用于对打磨机构进行打磨控制处理;所述控制系统还用于对吸尘组件进行吸尘控制处理。2.根据权利要求1所述的一种上模打磨装置,其特征在于:所述打磨机构包括电机安装架、打磨电机、连接套以及打磨头,电机安装架与打磨机械臂固定连接,打磨电机设于电机安装架内,连接套与电机安装架后侧转动连接,打磨电机的输出轴贯穿电机安装架与连接套传动连接,打磨头与连接套可拆卸连接,电机安装架设有吸尘组件。3.根据权利要求2所述的一种上模打磨装置,其特征在于:所述吸尘组件包括吸尘罩、伸缩套、连通管以及安装件,吸尘罩设于电机安装架后侧,且吸尘罩位于连接套外侧,伸缩套后侧粘接有接触垫,伸缩套通过安装件与接触垫可拆卸连接,伸缩套位于打磨头外侧,且伸缩套与打磨头之间留有间隙,连通管一端与吸尘罩内连通,连通管另一端与外界风机连接。4.根据权利要求3所述的一种上模打磨装置,其特征在于:所述控制系统包括图像扫描单元、第一驱动单元和第二驱动单元、第三驱动单元;所述第一驱动单元用于向第一电机和第二电机发送控制指令,通过第一电机和第二电机驱动动作实现控制打磨机械臂位置调整,移动打磨机械臂上的当前打磨头组件的位置;所述图像扫描单元用于对当前打磨头组件朝向的上模进行图像采集得到实时的图像
数据,并根据所述图像数据对当前上模位置进行识别确认;所述图像扫描单元还用于识别当前图像数据与图像数据库预存中的上模的需打磨位置的标注图像数据进行匹配,在匹配成功后认定当前图像数据所在位置为确认的待打磨位置;所述第二驱动单元启动控制打磨电机对当前待打磨位置实时进行启动控制实现打磨处理;所述第三驱动单元启动控制外界风机对当前待打磨位置实时进行启动控制实现吸尘处理。5.根据权利要求4所述的一种上模打磨装置,其特征在于:所述控制系统还包括数据反馈单元;所述打磨机械臂的头端的打磨头组件处安装有位置传感器;所述数据反馈单元分别与所述位置传感器、第一驱动单元、第二驱动单元和第三驱动单元建立通信连接。6.根据权利要求5所述的一种上模打磨装置,其特征在于:所述数据反馈单元用于对第一驱动单元的移动控制指令进行记录存储并接收位置传感器发送的位置变化数据,以记录存储打磨头组件的位置轨迹;所述数据反馈单元还用于对所述第二驱动单元的当前打磨位置处的打磨处理时间进行记录;所述数据反馈单元还用于对所述第三驱动单元的当前打磨位置处的吸尘处理时间进行记录。7.根据权利要求6所述的一种上模打磨装置,其特征在于:所述位置传感器为距离传感器;所述距离传感器防尘封装在所述打磨机构的电机安装架处。8.一种打磨方法,其特征在于:其利用如权利要求5
‑
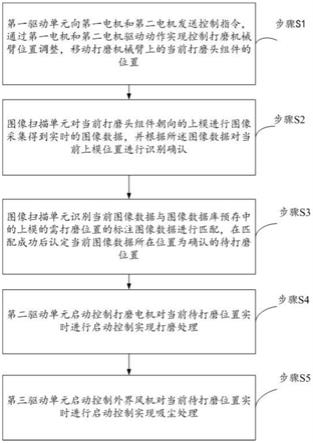
7任一项所述上模打磨装置实施对上模进行打磨处理,包括如下操作步骤:步骤s1:所述第一驱动单元向第一电机和第二电机发送控制指令,通过第一电机和第二电机驱动动作实现控制打磨机械臂位置调整,移动打磨机械臂上的当前打磨头组件的位置;步骤s2:所述图像扫描单元对当前打磨头组件朝向的上模进行图像采集得到实时的图像数据,并根据所述图像数据对当前上模位置进行识别确认;步骤s3:所述图像扫描单元识别当前图像数据与图像数据库预存中的上模的需打磨位置的标注图像数据进行匹配,在匹配成功后认定当前图像数据所在位置为确认的待打磨位置;步骤s4:所述第二驱动单元启动控制打磨电机对当前待打磨位置实时进行启动控制实现打磨处理;步骤s5:所述第三驱动单元启动控制外界风机对当前待打磨位置实时进行启动控制实现吸尘处理。9.根据权利要求8所述的一种打磨方法,其特征在于:在所述步骤s5之后,还包括如下操作步骤s6:对当前上模的打磨位置轨迹进行记录,并记录每个打磨位置轨迹的节点上的打磨处理时间和吸尘处理时间。10.根据权利要求9所述的一种打磨方法,其特征在于:所述对当前上模的打磨位置轨迹进行记录,并记录每个打磨位置轨迹的节点上的打磨处理时间和吸尘处理时间,具体包括如下操作步骤:步骤s61:数据反馈单元对第一驱动单元的移动控制指令进行记录存储并接收位置传感器发送的位置变化数据,以记录存储打磨头组件的位置轨迹;
步骤s62:数据反馈单元对第二驱动单元的当前打磨位置处的打磨处理时间进行记录;步骤s63:数据反馈单元对所述第三驱动单元的当前打磨位置处的吸尘处理时间进行记录。
技术总结
本发明属于物体打磨技术领域,具体涉及一种上模打磨装置及打磨方法,其中该上模打磨装置主要由可调式打磨工位和打磨头组件以及控制系统构成;可调式打磨工位包括纵向设置的第一矩形框,第一矩形框上端左右两侧对称设有第一滑轨,两个第一滑轨共同滑动连接有横向设置的第二矩形框;打磨头组件包括打磨机构和吸尘组件;打磨机构用于对上模实施打磨处理,且吸尘组件用于对打磨处实施实时吸尘处理;控制系统用于对可调式打磨工位进行控制实现打磨机械臂位置调整处理;上模打磨装置,其对上模进行位置调整、打磨处理、吸尘处理同步自动化控制,实现了自主识别位置,自主打磨处理,保障了作业效率。作业效率。作业效率。
技术研发人员:郑翼 高阳 郑彪
受保护的技术使用者:北京好运达智创科技有限公司
技术研发日:2021.10.11
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。