1.本发明涉及助力机械手技术领域,具体的说是一种基于狭小空间用的全向移动式助力机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,机械手种类繁多,助力机械手是机械手的一种,具有较好的可操控性,为了便于在狭小的空间内对重物进行拿取,就需要一种基于狭小空间用的全向移动式助力机械手。
3.目前助力机械手的底座多位固定式,固定式底座助力机械手对场合的适应能较小,不便于移动,而一些移动式助力机械手为了增加其稳定性,底座一般较大,采用平板式设计,对宽度和长度不便于调节,不便于在狭窄的空间内使用,如:在货车车厢内对较重的物品进行卸货时,不便于放置。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种基于狭小空间用的全向移动式助力机械手。
5.本发明解决其技术问题所采用的技术方案是:一种基于狭小空间用的全向移动式助力机械手,包括底座,所述底座连接有用于对重物进行搬运的助力结构,所述助力结构连接有进行限位的限位结构,所述底座安装有用于支撑装置工作的支撑结构,所述支撑结构连接有用于支撑结构更加平稳的抵触结构,所述底座连接有用于推动支撑结构工作的推动结构,所述底座安装有用于对支撑结构进行清理的刮蹭结构;所述支撑结构包括半齿轮,所述底座底端转动连接有两对半齿轮,两对所述半齿轮之间相互啮合,所述半齿轮的一端固定连接有固定块,所述底座靠近于固定块的一端均设有滑动槽,所述固定块的一端固定连接有滑动轴,所述滑动轴通过滑动槽和底座滑动连接,所述固定块内部滑动连接有支撑杆,所述支撑杆上均设有支撑槽,所述推动结构通过支撑槽和支撑杆连接,所述滑动槽呈弧形,所述固定块的长度小于支撑杆的长度。
6.具体的,所述助力结构包括机械手,所述底座的顶端安装有机械手,所述底座的两端均转动连接有防护板,所述防护板和底座之间通过第一扭簧抵触。
7.具体的,所述限位结构包括限位槽,所述底座的两端均设有限位槽,所述防护板滑动连接有限位块,所述限位块和防护板之间固定连接有弹簧,所述限位块通过限位槽和防护板抵触,所述限位块的一端呈斜面状,所述限位块呈“l”形。
8.具体的,所述推动结构包括电动推杆,所述机械手的底端安装有电动推杆,所述电动推杆的输出端固定连接有推动杆,所述推动杆的底端固定连接有固定盘,所述固定盘的底端固定连接有五个支撑轴,五个所述支撑轴的底端共同固定连接有底板,所述底板的两端均滑动连接有一对支撑块,所述支撑块通过支撑槽和支撑杆滑动连接,所述底板的底端
固定连接有两对万向轮,两对所述万向轮规格相同,两对所述万向轮呈矩形整列状排列于底板的底端,五个所述支撑轴长度相同,五个所述支撑轴呈“十”字形排列。
9.具体的,所述抵触结构包括抵触脚,两对所述支撑杆的底端均转动连接有抵触脚,所述抵触脚和支撑杆之间抵触有第二扭簧。
10.具体的,所述刮蹭结构包括海绵板,所述底座靠近于支撑杆的一端均转动连接有海绵板,所述海绵板和底座之间抵触有第三扭簧,所述海绵板的一端和支撑杆的一侧抵触。
11.本发明的有益效果是:(1)本发明所述的一种基于狭小空间用的全向移动式助力机械手,包括底座,底座连接有用于对重物进行搬运的助力结构,助力结构连接有进行限位的限位结构,通过助力结构便于对重物进行抬升提取,通过限位结构便于对助力结构进行限位,即:将装置放置于货车的内部,在需要卸下货车中较重的重物时,拉动限位块,弹簧将压缩,限位块将与限位槽脱离,从而便可将防护板打开,在第一扭簧的推动下,将推动防护板转动,从而便可将支撑杆暴露出,便于进行下一步操作,通过机械手便于对货车内部的重物进行抬升提取,从而使卸货更加的方便。
12.(2)本发明所述的一种基于狭小空间用的全向移动式助力机械手,底座安装有用于支撑装置工作的支撑结构,支撑结构连接有用于支撑结构更加平稳的抵触结构,底座连接有用于推动支撑结构工作的推动结构,通过支撑结构便于底座在较狭窄的空间内进行放置,并方便装置的全方向移动,通过推动结构能够控制支撑结构的工作状态,通过抵触结构能够使装置在放置时更加的稳定,即:将两对支撑杆从固定块的内部向外拉出,支撑块将运动到支撑槽靠近于固定块的一端,在水平方向上转动其中一个支撑杆,支撑杆将带动固定块转动,固定块将带动滑动轴沿着滑动槽转动,从而便于限制转动角度,固定块将带动与之固定连接的一个半齿轮转动,从而带动多个半齿轮转动,从而带动多个固定块转动,从而便于带动多个抵触脚转动,便于在狭窄的空间内将抵触脚一定角度展开,从而增加机械手在工作时的稳定性,启动电动推杆,电动推杆将推动推动杆向下运动,从而带动固定盘向下运动,在支撑轴的作用下将使底板和底座之间的距离增大,从而使底座升高,在支撑块的作用下,带动支撑杆向地面方向转动,支撑杆与地面抵触,支撑杆将推动万向轮与地面脱离,从而增大着地面积,从而便于增加机械手在工作时的稳定性,装置固定完成后便可操控机械手对货车内的物品进行搬运,当物品搬运完成后,使电动推杆将推动杆收回,将使底座与底板抵触,从而带动支撑杆转动,使抵触脚与地面脱离,第二扭簧将推动抵触脚复位,支撑杆将与固定块平行,从而便可将支撑杆推入到固定块的内部。
13.(3)本发明所述的一种基于狭小空间用的全向移动式助力机械手,底座安装有用于对支撑结构进行清理的刮蹭结构;通过刮蹭结构能够对支撑结构进行一定程度上的清理,即:在支撑杆推入的同时,支撑杆的一侧将与海绵板抵触,在第三扭簧的作用下,使海绵板抵触更加的紧密,从而便可对支撑杆的上掉落的灰尘进行清理,避免将灰尘带入到固定块的内部,此时万向轮的底端将于货车内部地面接触,转动防护板,使防护板闭合,松开限位块,在弹簧的作用下,将推动限位块进入到限位槽与底座抵触,从而便可推动底座运动。
附图说明
14.下面结合附图和实施例对本发明进一步说明。
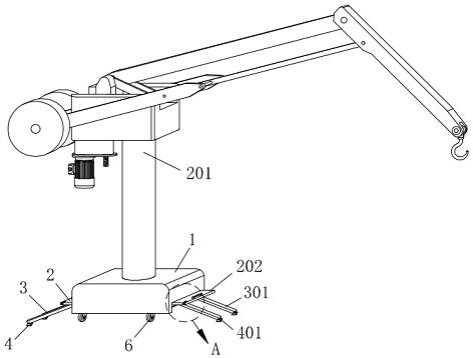
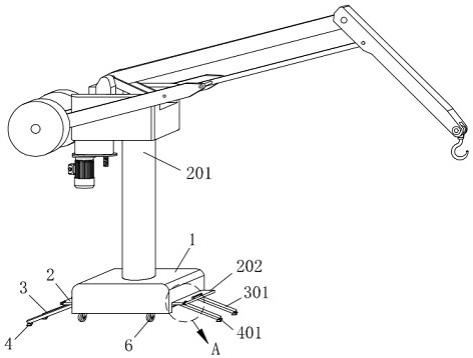
15.图1为本发明提供的一种基于狭小空间用的全向移动式助力机械手的一种较佳实施例的整体结构示意图;图2为图1所示的a部结构放大示意图;图3为本发明的支撑结构与推动结构的连接结构示意图;图4为图3所示的b部结构放大示意图;图5为图3所示的c部结构放大示意图;图6为本发明的支撑结构与推动结构的连接结构示意图;图7为本发明的滑动槽与滑动轴的连接结构示意图;图8为本发明的助力结构与限位结构的连接结构示意图。
16.图中:1、底座;2、助力结构;201、机械手;202、防护板;203、第一扭簧;3、支撑结构;301、支撑杆;302、支撑槽;303、支撑块;304、固定块;305、滑动轴;306、滑动槽;307、半齿轮;4、抵触结构;401、抵触脚;402、第二扭簧;5、限位结构;501、限位槽;502、限位块;503、弹簧;6、推动结构;601、电动推杆;602、推动杆;603、固定盘;604、支撑轴;605、底板;606、万向轮;7、刮蹭结构;701、海绵板;702、第三扭簧。
具体实施方式
17.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
18.如图1
‑
图8所示,本发明所述的一种基于狭小空间用的全向移动式助力机械手,包括底座1,所述底座1连接有用于对重物进行搬运的助力结构2,所述助力结构2连接有进行限位的限位结构5,所述底座1安装有用于支撑装置工作的支撑结构3,所述支撑结构3连接有用于支撑结构3更加平稳的抵触结构4,所述底座1连接有用于推动支撑结构3工作的推动结构6,所述底座1安装有用于对支撑结构3进行清理的刮蹭结构7;所述支撑结构3包括半齿轮307,所述底座1底端转动连接有两对半齿轮307,两对所述半齿轮307之间相互啮合,所述半齿轮307的一端固定连接有固定块304,所述底座1靠近于固定块304的一端均设有滑动槽306,所述固定块304的一端固定连接有滑动轴305,所述滑动轴305通过滑动槽306和底座1滑动连接,所述固定块304内部滑动连接有支撑杆301,所述支撑杆301上均设有支撑槽302,所述推动结构6通过支撑槽302和支撑杆301连接,所述滑动槽306呈弧形,所述固定块304的长度小于支撑杆301的长度。
19.具体的,所述助力结构2包括机械手201,所述底座1的顶端安装有机械手201,所述底座1的两端均转动连接有防护板202,所述防护板202和底座1之间通过第一扭簧203抵触;在第一扭簧203的推动下,将推动防护板202转动,从而便可将支撑杆301暴露出,便于进行下一步操作,通过机械手201便于对货车内部的重物进行抬升提取,从而使卸货更加的方便。
20.具体的,所述限位结构5包括限位槽501,所述底座1的两端均设有限位槽501,所述防护板202滑动连接有限位块502,所述限位块502和防护板202之间固定连接有弹簧503,所述限位块502通过限位槽501和防护板202抵触,所述限位块502的一端呈斜面状,所述限位块502呈“l”形;将装置放置于货车的内部,在需要卸下货车中较重的重物时,拉动限位块502,弹簧503将压缩,限位块502将与限位槽501脱离,从而便可将防护板202打开。
21.具体的,所述推动结构6包括电动推杆601,所述机械手201的底端安装有电动推杆601,所述电动推杆601的输出端固定连接有推动杆602,所述推动杆602的底端固定连接有固定盘603,所述固定盘603的底端固定连接有五个支撑轴604,五个所述支撑轴604的底端共同固定连接有底板605,所述底板605的两端均滑动连接有一对支撑块303,所述支撑块303通过支撑槽302和支撑杆301滑动连接,所述底板605的底端固定连接有两对万向轮606,两对所述万向轮606规格相同,两对所述万向轮606呈矩形整列状排列于底板605的底端,五个所述支撑轴604长度相同,五个所述支撑轴604呈“十”字形排列;启动电动推杆601,所述电动推杆601将推动推动杆602向下运动,从而带动固定盘603向下运动,在支撑轴604的作用下将使底板605和底座1之间的距离增大,从而使底座1升高,在支撑块303的作用下,带动支撑杆301向地面方向转动,支撑杆301与地面抵触,支撑杆301将推动万向轮606与地面脱离,从而增大着地面积,从而便于增加机械手201在工作时的稳定性。
22.具体的,所述抵触结构4包括抵触脚401,两对所述支撑杆301的底端均转动连接有抵触脚401,所述抵触脚401和支撑杆301之间抵触有第二扭簧402;支撑杆301底端转动连接有抵触脚401,抵触脚401将与地面抵触,第二扭簧402将压缩,从而使抵触脚401更好的与地面抵触,增加稳定性。
23.具体的,所述刮蹭结构7包括海绵板701,所述底座1靠近于支撑杆301的一端均转动连接有海绵板701,所述海绵板701和底座1之间抵触有第三扭簧702,所述海绵板701的一端和支撑杆301的一侧抵触;在支撑杆301推入的同时,支撑杆301的一侧将与海绵板701抵触,在第三扭簧702的作用下,使海绵板701抵触更加的紧密,从而便可对支撑杆301的上掉落的灰尘进行清理,避免将灰尘带入到固定块304的内部。
24.本发明在使用时,首先,将装置放置于货车的内部,在需要卸下货车中较重的重物时,拉动限位块502,弹簧503将压缩,限位块502将与限位槽501脱离,从而便可将防护板202打开,在第一扭簧203的推动下,将推动防护板202转动,从而便可将支撑杆301暴露出,便于进行下一步操作,通过机械手201便于对货车内部的重物进行抬升提取,从而使卸货更加的方便,将两对支撑杆301从固定块304的内部向外拉出,支撑块303将运动到支撑槽302靠近于固定块304的一端,在水平方向上转动其中一个支撑杆301,支撑杆301将带动固定块304转动,固定块304将带动滑动轴305沿着滑动槽306转动,从而便于限制转动角度,固定块304将带动与之固定连接的一个半齿轮307转动,从而带动多个半齿轮307转动,从而带动多个固定块304转动,固定块304带动支撑杆301,从而使支撑杆301带动支撑块303与底板605滑动,从而便于带动多个抵触脚401转动,便于在狭窄的空间内将抵触脚401一定角度展开,对狭窄空间适应能力强,可改变支撑面的大小,从而增加机械手201在工作时的稳定性,启动电动推杆601,所述电动推杆601将推动推动杆602向下运动,从而带动固定盘603向下运动,在支撑轴604的作用下将使底板605和底座1之间的距离增大,从而使底座1升高,在支撑块303的作用下,带动支撑杆301向地面方向转动,支撑杆301与地面抵触,支撑杆301将推动万向轮606与地面脱离,从而增大着地面积,从而便于增加机械手201在工作时的稳定性,支撑杆301底端转动连接有抵触脚401,抵触脚401将与地面抵触,第二扭簧402将压缩,从而使抵触脚401更好的与地面抵触,增加稳定性,装置固定完成后便可操控机械手201对货车内的物品进行搬运,当物品搬运完成后,使电动推杆601将推动杆602收回,将使底座1与底板605抵触,从而带动支撑杆301转动,使抵触脚401与地面脱离,第二扭簧402将推动抵触脚401复
位,支撑杆301将与固定块304平行,从而便可将支撑杆301推入到固定块304的内部,在支撑杆301推入的同时,支撑杆301的一侧将与海绵板701抵触,在第三扭簧702的作用下,使海绵板701抵触更加的紧密,从而便可对支撑杆301的上掉落的灰尘进行清理,避免将灰尘带入到固定块304的内部,此时万向轮606的底端将于货车内部地面接触,转动防护板202,使防护板202闭合,松开限位块502,在弹簧503的作用下,将推动限位块502进入到限位槽501与底座1抵触,从而便可推动底座1运动。
25.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
26.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。