技术特征:
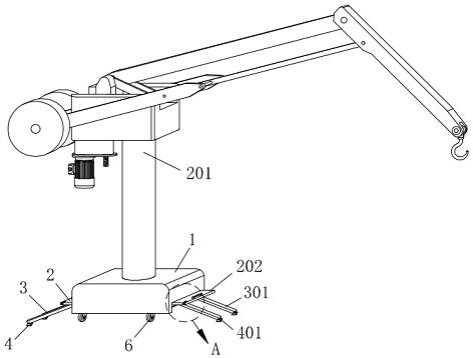
1.一种基于狭小空间用的全向移动式助力机械手,其特征在于,包括底座(1),所述底座(1)连接有用于对重物进行搬运的助力结构(2),所述助力结构(2)连接有进行限位的限位结构(5),所述底座(1)安装有用于支撑装置工作的支撑结构(3),所述支撑结构(3)连接有用于支撑结构(3)更加平稳的抵触结构(4),所述底座(1)连接有用于推动支撑结构(3)工作的推动结构(6),所述底座(1)安装有用于对支撑结构(3)进行清理的刮蹭结构(7);所述支撑结构(3)包括半齿轮(307),所述底座(1)底端转动连接有两对半齿轮(307),两对所述半齿轮(307)之间相互啮合,所述半齿轮(307)的一端固定连接有固定块(304),所述底座(1)靠近于固定块(304)的一端均设有滑动槽(306),所述固定块(304)的一端固定连接有滑动轴(305),所述滑动轴(305)通过滑动槽(306)和底座(1)滑动连接,所述固定块(304)内部滑动连接有支撑杆(301),所述支撑杆(301)上均设有支撑槽(302),所述推动结构(6)通过支撑槽(302)和支撑杆(301)连接。2.根据权利要求1所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:所述滑动槽(306)呈弧形,所述固定块(304)的长度小于支撑杆(301)的长度。3.根据权利要求1所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:所述助力结构(2)包括机械手(201),所述底座(1)的顶端安装有机械手(201),所述底座(1)的两端均转动连接有防护板(202),所述防护板(202)和底座(1)之间通过第一扭簧(203)抵触。4.根据权利要求3所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:所述限位结构(5)包括限位槽(501),所述底座(1)的两端均设有限位槽(501),所述防护板(202)滑动连接有限位块(502),所述限位块(502)和防护板(202)之间固定连接有弹簧(503),所述限位块(502)通过限位槽(501)和防护板(202)抵触。5.根据权利要求4所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:所述限位块(502)的一端呈斜面状,所述限位块(502)呈“l”形。6.根据权利要求3所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:所述推动结构(6)包括电动推杆(601),所述机械手(201)的底端安装有电动推杆(601),所述电动推杆(601)的输出端固定连接有推动杆(602),所述推动杆(602)的底端固定连接有固定盘(603),所述固定盘(603)的底端固定连接有五个支撑轴(604),五个所述支撑轴(604)的底端共同固定连接有底板(605),所述底板(605)的两端均滑动连接有一对支撑块(303),所述支撑块(303)通过支撑槽(302)和支撑杆(301)滑动连接,所述底板(605)的底端固定连接有两对万向轮(606)。7.根据权利要求6所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:两对所述万向轮(606)规格相同,两对所述万向轮(606)呈矩形整列状排列于底板(605)的底端。8.根据权利要求6所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:五个所述支撑轴(604)长度相同,五个所述支撑轴(604)呈“十”字形排列。9.根据权利要求1所述的一种基于狭小空间用的全向移动式助力机械手,其特征在于:所述抵触结构(4)包括抵触脚(401),两对所述支撑杆(301)的底端均转动连接有抵触脚(401),所述抵触脚(401)和支撑杆(301)之间抵触有第二扭簧(402)。10.根据权利要求1所述的一种基于狭小空间用的全向移动式助力机械手,其特征在
于:所述刮蹭结构(7)包括海绵板(701),所述底座(1)靠近于支撑杆(301)的一端均转动连接有海绵板(701),所述海绵板(701)和底座(1)之间抵触有第三扭簧(702),所述海绵板(701)的一端和支撑杆(301)的一侧抵触。
技术总结
本发明涉及助力机械手技术领域,具体的说是一种基于狭小空间用的全向移动式助力机械手,包括底座,所述底座连接有用于对重物进行搬运的助力结构,所述助力结构连接有进行限位的限位结构,所述底座安装有支撑结构,所述支撑结构连接有用于支撑结构更加平稳的抵触结构,所述底座连接有推动结构,所述底座安装有用于对支撑结构进行清理的刮蹭结构,通过助力结构便于对重物进行抬升提取,通过支撑结构便于底座在较狭窄的空间内进行放置,并方便装置的全方向移动,通过限位结构便于对助力结构进行限位,通过推动结构能够控制支撑结构的工作状态,通过刮蹭结构能够对支撑结构进行一定程度上的清理,通过抵触结构能够使装置在放置时更加的稳定。更加的稳定。更加的稳定。
技术研发人员:王三祥 王欣 顾潇 刘洪顺 朱锦华 杨万昌 周永芹
受保护的技术使用者:江苏昱博自动化设备有限公司
技术研发日:2021.09.01
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。