技术特征:
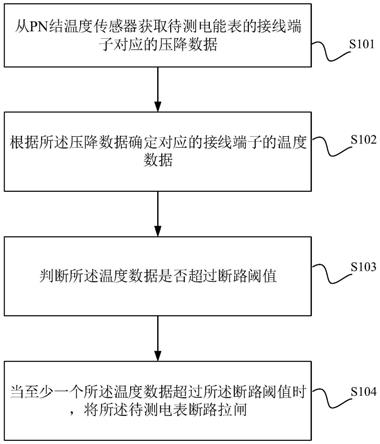
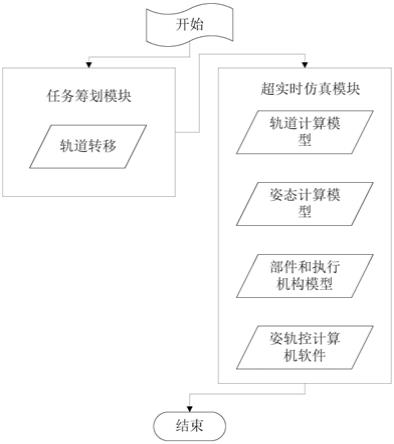
1.一种决策支持超实时计算系统,其特征在于,包括任务筹划模块和超实时仿真模块,所述任务筹划模块根据需求生成卫星轨道转移与调整策略,所述超实时仿真模块生成的策略进行超实时仿真验证。2.根据权利要求1所述的决策支持超实时计算系统,其特征在于,所述任务筹划模块生成卫星轨道转移与调整策略,所述任务筹划模块用于用户任务要求输入、系统实时姿势计算和生成辅助决策信息,所述任务筹划模块包含精度轨道递推模型。3.根据权利要求1所述的决策支持超实时计算系统,其特征在于,所述超实时仿真模块包括卫星全数字模型,所述超实时仿真模块对轨道转移和调整策略进行超实时仿真,对轨道和姿态进行动力学递推,所述卫星全数字模型包含姿态测量部件、执行机构数字模型和姿轨控仿真计算机软件,所述超实时仿真模块用于卫星动力学过程模拟和超实时仿真控制。4.根据权利要求1所述的决策支持超实时计算系统,其特征在于,所述超实时仿真模块包括轨道计算模型和精度轨道动力学递推模型,重力场摄动为j2、j3、j4项摄动以及j22、j31、j33、j42、j44田谐项摄动,三体引力摄动为太阳和月球,太阳光压摄动。5.根据权利要求1所述的决策支持超实时计算系统,其特征在于,所述超实时仿真模块包括姿态动力学计算模型,贮箱液体晃动对帆板模态、飞轮角动量、帆板角动量、重力梯度力矩、飞轮反作用力矩、推力器力矩以及太阳光压干扰力矩具备在轨道坐标系、地北东坐标系、安全坐标系下姿态解算能力。6.根据权利要求1所述的决策支持超实时计算系统,其特征在于,所述超实时仿真模块包括姿态测量部件和执行机构数字模型、飞轮模型、力矩补偿轮模型、490n发动机模型、推力器模型、太阳电池阵子系、陀螺模型、红外地球敏感器模型、星敏感器模型、数字式太阳敏感器模型、模拟式太阳敏感器模型以及0
‑
1式太阳敏感器模型。7.根据权利要求1所述的决策支持超实时计算系统,其特征在于,所述超实时仿真模块中的姿轨控仿真计算机软件提供1750虚拟目标机和串口调试能力,仿真星载计算机的a/d、d/a、串口、1553总线等端口,调整仿真步长。8.一种决策支持超实时计算方法,其特征在于,所述方法应用如权利要求1
‑
7任一项所述的决策支持超实时计算系统,所述方法包括任务筹划,所述任务筹划包括如下步骤:步骤s1:根据用户任务需求输入任务类型和执行任务所需的各项约束;步骤s2:计算卫星之间的相对关系和轨道信息;步骤s3:根据实时姿势信息和任务类型选择,计算轨道转移和调整策略,给出速度脉冲的位置和大小。9.根据权利要求8所述的决策支持超实时计算方法,其特征在于,所述轨道转移包括如下步骤:步骤1:在原轨道停留时长t1;步骤2:进行第一次霍曼转移,抬高或者降低轨道;步骤3:在抬高或降低的轨道停留时间t2。10.根据权利要求9所述的决策支持超实时计算方法,其特征在于,所述轨道转移还包括如下步骤:步骤4:进行第二次霍曼转移,从抬高或降低的轨道转移到新的轨道;
步骤5:在新的轨道停留t3。
技术总结
本发明提供了一种决策支持超实时计算系统及方法,包括:包含任务筹划模块和超实时仿真模块,任务筹划模块根据需求生成卫星轨道转移与调整策略,超实时仿真模块将生成的策略进行超实时快速仿真验证。利用本发明,可以使得任务筹划过程1:1000超实时仿真计算,卫星全数字模型仿真1:32超实时仿真计算,有效提高仿真效率。本发明有效解决了全数字模型下快速筹划仿真系统,可以使得任务筹划过程以1:1000超实时仿真计算,卫星全数字模型仿真以1:32超实时仿真计算;本发明提供的任务筹划模块,可根据用户输入,生成相应的轨道转移与调整策略,且可使用高精度/低精度模型计算,具有较强的工程应用性。程应用性。程应用性。
技术研发人员:宋君强 邓武东 朱晨聪 曲耀斌 陈占胜 张峰 李长友 陈修桥
受保护的技术使用者:上海卫星工程研究所
技术研发日:2021.09.10
技术公布日:2021/12/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。