1.本发明属于人工智能技术领域,更具体地说,特别涉及一种人工智能避障小车。
背景技术:
2.伴随着人工智能的快速发展,无人驾驶技术安全隐患,成为重点需要解决的问题;避障作为无人驾驶的关键技术,智能小车在复杂工作环境下行驶的前提则为能够准确检测出前方障碍物与安全穿过障碍物到达目的地。
3.人工智能避障小车可以参考cn112198881a号专利,其主要包括中央处理器、主控制器、图像采集模块、转向驱动模块、行走驱动模块、gps导航模块和红外测距传感器,所述图像采集模块包括采集探头、探头电机和探头电机辅助控制器,所述探头电机的输出端连接所述采集探头用于带动其旋转,所述探头电机辅助控制器用于控制探头电机的启停,所述转向驱动模块包括转向轮、转向电机和转向电机辅助控制器,所述转向电机驱动连接所述转向轮,所述转向电机辅助控制器用于控制转向电机的启停,所述行走驱动模块包括行走轮、行走电机、行走电机辅助控制器,所述行走电机驱动连接所述行走轮,所述行走电机辅助控制器用于控制行走电机的启停,所述gps导航模块与中央处理器连接。
4.现有类似的人工智能避障小车在使用时,可调节效果较差,不具有较好的缓冲减震的效果,且当探测装置检测到装置前处底端有障碍物时,无法较方便的对本装置的整体车身上升,提高本装置的避障效果,且当无障碍物时,无法控制车身下降,以提高本装置移动的稳定性,且本装置两侧对本装置内部的保护效果不佳,且得不到提示以及较佳的距离监测作作用工艺导致装置内部容易直接与障碍物相撞。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种人工智能避障小车,以解决现有类似可调节效果较差,不具有较好的缓冲减震的效果,且当探测装置检测到装置前处底端有障碍物时,无法较方便的对本装置的整体车身上升,提高本装置的避障效果,且当无障碍物时,无法控制车身下降,以提高本装置移动的稳定性,且本装置两侧对本装置内部的保护效果不佳,且得不到提示以及较佳的距离监测作作用工艺导致装置内部容易直接与障碍物相撞的问题。
6.本发明人工智能避障小车的目的与功效,由以下具体技术手段所达成:
7.一种人工智能避障小车,包括安装底板;
8.所述安装底板的两侧各安装有两处安装筒座,安装底板底端固定安装有一处驱动架,安装底板顶端后侧安装有一处控制器,安装底板前侧底端安装有探测装置,安装底板的顶面前端安装有一处警报装置;
9.所述安装底板顶端中间安装有一处供电装置,且供电装置包括有太阳能电池板与蓄电池;
10.所述驱动架上安装有四组驱动电机驱动安装有驱动轮;
11.所述控制器上安装有一处gps定位模块和远程传输模块。
12.进一步的,所述安装筒座内部开设有一处轴滑槽,连接杆内端为一处底滑轴,连接杆内端的底滑轴滑动安装于安装筒座内部的轴滑槽内,且连接杆上底滑轴与安装筒座内部轴滑槽之间安装有一处第一弹性件。
13.进一步的,所述警报装置包括有警报灯和蜂鸣器,蜂鸣器安装于警报灯的后端,侧撑轮的外端安装有压力传感器,且警报装置与压力传感器通过线路分别与控制器连接。
14.进一步的,所述转动臂顶端转动连接于安装梁上侧臂梁的外端,同侧的两处转动臂中间焊接有一处横梁臂,横梁臂底端固定安装有驱动电机,且驱动电机的传动轴上驱动安装有驱动轮。
15.进一步的,所述安装底板的前侧顶端安装有一处连接支架,连接支架顶端固定安装有一处转动电机,且转动电机的传动轴顶端驱动安装有一处监控器。
16.进一步的,两处所述转动臂中间焊接的横梁臂上转动连接有一处电动伸缩杆,电动伸缩杆顶端转动连接于驱动架上安装梁的外端,且电动伸缩杆通过线路与控制器相连接。
17.进一步的,所述驱动架上的侧臂梁两侧底端分别固定安装有一处液压杆。
18.进一步的,所述探测装置通过线路与控制器相连接,探测装置包括:
19.主超声波探测器,主超声波探测器通过安装杆固定安装于安装底板前侧底端的中间位置;
20.侧超声波探测器,侧超声波探测器设有两处,两处侧超声波探测器分别通过固定安装于安装底板前侧两端,且两处侧超声波探测器分别置于前中轴线向外转动四十五度的角度位置。
21.进一步的,所述连接杆外端转动安装有一处侧撑轮,且侧撑轮为双层轮式结构。
22.进一步的,所述液压杆底端为一处安装轴座,且液压杆底端的安装轴座两端各固定安装有一处第二弹性件,且液压杆底端安装的第二弹性件外端固定安装于转动臂的内端。
23.与现有技术相比,本发明具有如下有益效果:
24.1.驱动架的设置,有利于液压杆底端的安装轴座两端各固定安装有一处第二弹性件,配合转动臂顶端转动连接于安装梁上侧臂梁的外端,使得本装置具有较高的缓冲减震效果,且探测装置的主超声波探测器与侧超声波探测器的设置,进一步提高了本装置避障的监测效果,且当探测装置检测到装置前处底端有障碍物时,控制器控制电动伸缩杆带动安装梁向下运动,从而控制本装置的整体车身上升,提高本装置的避障效果,同时当无障碍物时,电动伸缩杆控制车身下降,提高本装置移动的稳定性。
25.2.安装底板的设置,有利于连接杆外端转动安装有一处侧撑轮,侧撑轮接触到外侧障碍物时能够旋转,提高了本装置两端的支撑通过性,同时,连接杆内端的底滑轴滑动安装于安装筒座内部的轴滑槽内,配合连接杆上底滑轴与安装筒座内部轴滑槽之间安装有一处第一弹性件,提高了对本装置的保护效果,且侧撑轮的外端安装的压力传感器在检测到侧撑轮外端的压力超过预定阈值后,控制器控制驱动电机带动驱动轮进行转向偏移,同时避免侧撑轮内压过大而导致装置内部与障碍物相撞。
附图说明
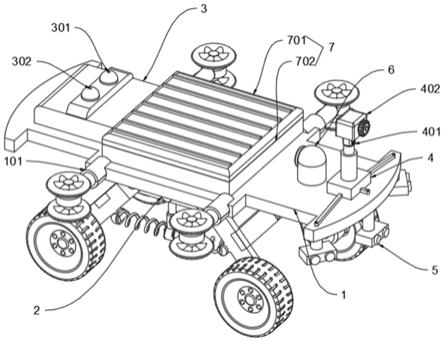
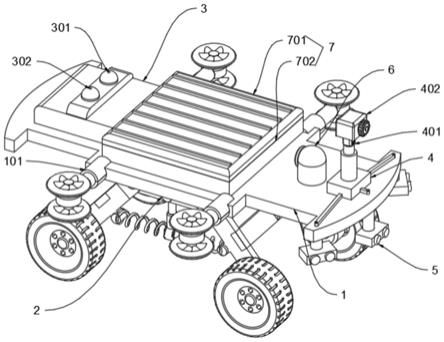
26.图1是本发明的结构示意图。
27.图2是本发明的俯视结构示意图。
28.图3是本发明的底部结构示意图。
29.图4是本发明中侧撑轮的安装结构示意图。
30.图5是本发明中驱动架的结构示意图。
31.图6是本发明的前端局部结构示意图。
32.图7是本发明图1中a的局部放大结构示意图。
33.图中,部件名称与附图编号的对应关系为:
34.1、安装底板;
35.101、安装筒座;1011、轴滑槽;102、第一弹性件;103、连接杆;1031、底滑轴;104、侧撑轮;1041、压力传感器;
36.2、驱动架;
37.201、安装梁;202、侧臂梁;203、液压杆;2031、安装轴座;204、转动臂;2041、横梁臂;2042、驱动电机;205、第二弹性件;206、电动伸缩杆;207、驱动轮;
38.3、控制器;
39.301、gps定位模块;302、远程传输模块;
40.4、连接支架;
41.401、转动电机;402、监控器;
42.5、探测装置;
43.501、主超声波探测器;502、侧超声波探测器;
44.6、警报装置;
45.601、警报灯;602、蜂鸣器;
46.7、供电装置;
47.701、太阳能电池板;702、蓄电池。
具体实施方式
48.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
49.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
50.实施例:
51.如附图1至附图7所示:
52.本发明提供一种人工智能避障小车,包括安装底板1;
53.安装底板1的两侧各安装有两处安装筒座101,安装底板1底端固定安装有一处驱动架2,安装底板1顶端后侧安装有一处控制器3,安装底板1前侧底端安装有探测装置5,安装底板1的顶面前端安装有一处警报装置6;
54.安装底板1顶端中间安装有一处供电装置7,且供电装置7包括有太阳能电池板701与蓄电池702;
55.驱动架2上安装有四组驱动电机2042驱动安装有驱动轮207;
56.控制器3上安装有一处gps定位模块301和远程传输模块302。
57.如图5所示,驱动架2上的侧臂梁202两侧底端分别固定安装有一处液压杆203。
58.如图7所示,液压杆203底端为一处安装轴座2031,且液压杆203底端的安装轴座2031两端各固定安装有一处第二弹性件205,且液压杆203底端安装的第二弹性件205外端固定安装于转动臂204的内端。
59.其中,转动臂204顶端转动连接于安装梁201上侧臂梁202的外端,同侧的两处转动臂204中间焊接有一处横梁臂2041,横梁臂2041底端固定安装有驱动电机2042,且驱动电机2042的传动轴上驱动安装有驱动轮207。
60.驱动电机,电动机(motor)是把电能转换成机械能的一种设备,将电能转变为机械能;它主要包括一个用以产生磁场的电磁铁绕组或分布的定子绕组和一个旋转电枢或转子;利用通电线圈产生旋转磁场并作用于转子形成磁电动力旋转扭矩;按使用电源不同分为直流电动机和交流电动机,电力系统中的电动机大部分是交流电机,可以是同步电机或者是异步电机。
61.其中,两处转动臂204中间焊接的横梁臂2041上转动连接有一处电动伸缩杆206,电动伸缩杆206顶端转动连接于驱动架2上安装梁201的外端,且电动伸缩杆206通过线路与控制器3相连接。
62.电动伸缩杆,英文名linear actuator,又称推杆电机、电动缸及线性制动器;电动推杆是一种将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置;可用于各种简单或复杂的工艺流程中做为执行机械使用,以实现远距离控制、集中控制或自动控制。
63.其中,安装底板1的前侧顶端安装有一处连接支架4,连接支架4顶端固定安装有一处转动电机401,且转动电机401的传动轴顶端驱动安装有一处监控器402。
64.其中,探测装置5通过线路与控制器3相连接,探测装置5包括:
65.主超声波探测器501,主超声波探测器501通过安装杆固定安装于安装底板1前侧底端的中间位置;
66.侧超声波探测器502,侧超声波探测器502设有两处,两处侧超声波探测器502分别通过固定安装于安装底板1前侧两端,且两处侧超声波探测器502分别置于前中轴线向外转动四十五度的角度位置;具体作用,液压杆203底端的安装轴座2031两端各固定安装有一处第二弹性件205,配合转动臂204顶端转动连接于安装梁201上侧臂梁202的外端,使得本装置具有较高的缓冲减震效果,且探测装置5的主超声波探测器501与侧超声波探测器502的设置,进一步提高了本装置避障的监测效果,且当探测装置5检测到装置前处底端有障碍物时,控制器3控制电动伸缩杆206带动安装梁201向下运动,从而控制本装置的整体车身上升,提高本装置的避障效果,同时当无障碍物时,电动伸缩杆206控制车身下降,提高本装置移动的稳定性。
67.其中,安装筒座101内部开设有一处轴滑槽1011,连接杆103内端为一处底滑轴1031,连接杆103内端的底滑轴1031滑动安装于安装筒座101内部的轴滑槽1011内,且连接杆103上底滑轴1031与安装筒座101内部轴滑槽1011之间安装有一处第一弹性件102。
68.其中,连接杆103外端转动安装有一处侧撑轮104,且侧撑轮104为双层轮式结构。
69.如图6所示,警报装置6包括有警报灯601和蜂鸣器602,蜂鸣器602安装于警报灯601的后端,侧撑轮104的外端安装有压力传感器1041,且警报装置6与压力传感器1041通过线路分别与控制器3连接;具体作用,连接杆103外端转动安装有一处侧撑轮104,侧撑轮104接触到外侧障碍物时能够旋转,提高了本装置两端的支撑通过性,同时,连接杆103内端的底滑轴1031滑动安装于安装筒座101内部的轴滑槽1011内,配合连接杆103上底滑轴1031与安装筒座101内部轴滑槽1011之间安装有一处第一弹性件102,提高了对本装置的保护效果,且侧撑轮104的外端安装的压力传感器1041在检测到侧撑轮104外端的压力超过预定阈值后,控制器3控制驱动电机2042带动驱动轮207进行转向偏移,同时避免侧撑轮104内压过大而导致装置内部与障碍物相撞。
70.在另一实施例中,警报装置6底端可设有伸缩杆,进一步提高本装置便于调节其警示高度的性能。
71.本实施例的具体使用方式与作用:
72.本发明在使用时,液压杆203底端的安装轴座2031两端各固定安装有一处第二弹性件205,配合转动臂204顶端转动连接于安装梁201上侧臂梁202的外端,使得本装置具有较高的缓冲减震效果,且探测装置5的主超声波探测器501与侧超声波探测器502的设置,进一步提高了本装置避障的监测效果,且当探测装置5检测到装置前处底端有障碍物时,控制器3控制电动伸缩杆206带动安装梁201向下运动,从而控制本装置的整体车身上升,提高本装置的避障效果,同时当无障碍物时,电动伸缩杆206控制车身下降,提高本装置移动的稳定性,配合连接杆103外端转动安装有一处侧撑轮104,侧撑轮104接触到外侧障碍物时能够旋转,提高了本装置两端的支撑通过性,同时,连接杆103内端的底滑轴1031滑动安装于安装筒座101内部的轴滑槽1011内,配合连接杆103上底滑轴1031与安装筒座101内部轴滑槽1011之间安装有一处第一弹性件102,提高了对本装置的保护效果,且侧撑轮104的外端安装的压力传感器1041在检测到侧撑轮104外端的压力超过预定阈值后,控制器3控制驱动电机2042带动驱动轮207进行转向偏移,同时避免侧撑轮104内压过大而导致装置内部与障碍物相撞。
73.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。