1.本发明涉及机器人技术领域,尤其涉及一种巡检机器人行走路线追踪系统及方法。
背景技术:
2.巡检机器人主要是通过图像识别,对事物和人进行识别排查,遇到可疑的物体会自主报警,给企业带来安全保障,并且代替人工去一些危险的地方进行排查,避免出现人员伤亡问题。
3.巡检机器人通常在控制器中预先规划好行走路线,按照规划路线进行行走巡检,但是,现有机器人并没有对其进行路线跟踪,如果在预先规划好的路线中出现障碍物,机器人在躲避障碍物的过程中,很容易触碰到障碍物,从而使得机器人容易被碰倒,或者容易偏离预先的规划路线,导致巡检效果不佳。
技术实现要素:
4.本发明的目的在于提供一种巡检机器人行走路线追踪系统及方法,旨在解决现有技术中的的技术问题。
5.为实现上述目的,本发明采用的一种巡检机器人行走路线追踪系统,包括跟踪模块、规划模块和行走模块,所述跟踪模块与所述规划模块连接,所述行走模块与所述规划模块连接;所述跟踪模块,用于获取机器人定位信息,以及机器人的前方物体信息,并将信息上传至所述规划模块;所述规划模块,用于识别所述跟踪模块上传的信息,并根据识别结果和机器人定位信息规划实时行走路线,并将所述实时行走路线上传至所述行走模块;所述行走模块,用于获取用户指令,以及所述实时行走路线,以此控制机器人行走。
6.所述跟踪模块通过gps获取机器人的实时定位信息,通过摄像头和传感器获取机器人前方物体信息,并将获取信息上传至所述规划模块,所述规划模块对上传信息进行图像识别,由此判断出前方物体的大小和距离机器人的距离,然后计算出实时行走路线,上传至所述行走模块,控制机器人规避障碍物,再按照设定规划路线进行巡检,避免与障碍物的硬物触碰,使其能够按照规划路线进行巡检,促使巡检效果更佳。
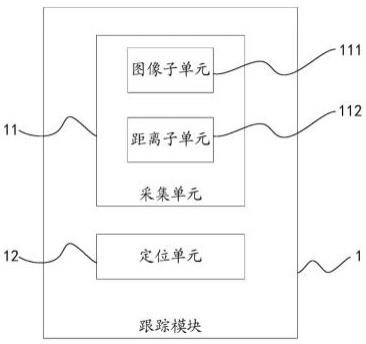
7.其中,所述跟踪模块包括采集单元和定位单元,所述采集单元与所述规划模块连接,所述定位单元与所述规划模块连接;所述采集单元,用于获取机器人巡检过程中的前方物体信息,并将信息上传至所述规划模块;所述定位单元,用于获取机器人巡检过程中的实时定位信息,并将所述定位信息上传至所述规划模块。
8.所述采集单元采集机器人巡检过程中前方物体的图像信息和距离信息,变将采集的信息上传至所述规划模块,所述定位单元通过gps获取机器人的实时定位信息,并将定位信息上传至所述规划模块,便于所述规划模块对其进行计算。
9.其中,所述采集单元包括图像子单元和距离子单元,所述图像子单元与所述规划模块连接,所述距离子单元与所述规划模块连接;所述图像子单元,用于获取机器人巡检过程中前方物体的图像信息,并将所述图像信息上传至所述规划模块;所述距离子单元,用于获取机器人巡检过程中前方物体与机器人的距离信息,并将所述距离信息上传至所述规划模块。
10.所述图像子单元通过摄像头拍摄机器人前方物体的图像信息,所述距离子单元通过距离传感器获取机器人前方物体与机器人的距离信息,并将获取的信息上传至所述规划模块,便于其规划最新路线。
11.其中,所述规划模块包括图像识别单元和路线更新单元,所述图像识别单元与所述图像子单元连接,所述路线更新单元分别与所述图像识别单元连接和所述行走模块连接;所述图像识别单元,用于获取所述图像信息,并将所述图像信息进行处理和识别,并将识别结果上传至所述路线更新单元;所述路线更新单元,用于获取所述识别结果、所述距离信息和所述定位信息,并通过计算规划出实时行走路线,并将所述实时行走路线上传至所述行走模块。
12.所述图像识别单元对获取的前方物体图像进行处理和识别,计算出前方物体的基本轮廓,然后上传至所述路线更新单元,所述路线更新单元获取前方物体的基本轮廓、机器人与前方物体的距离信息和机器人定位信息,以此规划出最新路线,再上传至所述行走模块,控制机器人能够规避障碍物而行走。
13.其中,所述规划模块还包括自主学习单元,所述自主学习单元与所述路线更新单元连接;所述自主学习单元,用于获取并存储所述实时行走路线,并将历史数据中所述识别结果、所述距离信息和所述定位信息进行对比,并将对比结果上传至所述路线更新单元。
14.所述自主学习单元,获取和存储实时行走路线,和各个上传的信息数据,制备成数据库,当出现相同数据时,和直接调取出相对应的实时行走路线,使其无需再重复计算,减少追踪系统的运行负担。
15.其中,所述行走模块包括控制单元和指令单元,所述控制单元与所述路线更新单元连接,所述指令单元与所述控制单元连接;所述控制单元,用于获取所述实时行走路线,并根据所述实时行走路线控制机器人行走;所述指令单元,用于获取用户指令,并将所述用户指令转化为控制指令,以及将所述控制指令下达于所述控制单元。
16.所述控制单元获取实时行走路线,并控制机器人按照设设定路线进行行走,所述指令单元用于获取用户指令,依次控制机器人的运行。
17.一种巡检机器人行走路线追踪方法,包括以下步骤:
通过指令单元下达巡检指令,机器人接收所述巡检指令,并开始巡检;通过跟踪模块实时获取机器人巡检过程中的前方物体信息,并将所述前方物体信息上传至规划模块;通过所述规划模块根据获取的信息计算出实时行走路线,并将所述实时行走路线上传至控制单元,所述控制单元控制机器人规避障碍物。
18.首先,通过所述指令单元获取用户指令,下达巡检指令,机器人接收所述巡检指令,并开始巡检,然后,所述跟踪模块实时获取机器人前方物体信息,并上传至所述规划模块,所述规划模块根据前方物体信息规划出实时行走路线,然后上传至所述控制单元,控制机器人规避前方的障碍物,避免机器人与硬物触碰,促使机器人能够正常进行巡检,巡检效果更佳。
19.本发明的巡检机器人行走路线追踪系统及方法,通过所述跟踪模块实时获取机器人的定位信息和机器人前方物体的信息,并将信息上传至所述规划模块,所述规划模块识别上传的信息,并根据识别结果和机器人的实时定位信息规划出实时行走路线,然后上传至所述行走模块,由所述行走模块控制机器人改变行走路线,规避障碍物,然后按照设定路线进行巡检,避免机器人与硬物触碰而造成的损坏和偏移,促使巡检效果更佳。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1是本发明的巡检机器人行走路线追踪系统的结构示意图。
22.图2是本发明的跟踪模块的结构示意图。
23.图3是本发明的规划模块的结构示意图。
24.图4是本发明的行走模块的结构示意图。
25.图5是本发明的巡检机器人行走路线追踪方法的步骤图。
[0026]1‑
跟踪模块、2
‑
规划模块、3
‑
行走模块、11
‑
采集单元、12
‑
定位单元、21
‑
图像识别单元、22
‑
路线更新单元、23
‑
自主学习单元、31
‑
控制单元、32
‑
指令单元、33
‑
记录单元、111
‑
图像子单元、112
‑
距离子单元、321
‑
语音子单元、322
‑
手势子单元。
具体实施方式
[0027]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0028]
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0029]
请参阅图1至图4,本发明提供了一种巡检机器人行走路线追踪系统,包括跟踪模块1、规划模块2和行走模块3,所述跟踪模块1与所述规划模块2连接,所述行走模块3与所述规划模块2连接;所述跟踪模块1,用于获取机器人定位信息,以及机器人的前方物体信息,并将信息上传至所述规划模块2;所述规划模块2,用于识别所述跟踪模块1上传的信息,并根据识别结果和机器人定位信息规划实时行走路线,并将所述实时行走路线上传至所述行走模块3;所述行走模块3,用于获取用户指令,以及所述实时行走路线,以此控制机器人行走。
[0030]
在本实施方式中,所述跟踪模块1通过gps获得机器人的实时定位信息,通过摄像头和传感器获得机器人前方物体信息,并将信息上传至所述规划模块2,所述规划模块2将所述跟踪模块1上传的信息进行处理和识别,再结合机器人的实时定位信息,制定出实时行走路线,其中,实时行走路线用于规避障碍物,然后再按照需求对巡检区域进行巡检的路线,并将实时行走路线上传至所述行走模块3,进而由所述行走模块3控制机器人规避障碍物后,再对巡检区域进行巡检,其中,所述行走模块3还用来接收用户指令,控制机器人的运行,进而实时监控机器人行走路线,使机器人规避障碍物,避免机器人因与硬物触碰而损坏,或因障碍物而偏离规划路线,促使巡检效果更佳。
[0031]
进一步地,请参阅图2,所述跟踪模块1包括采集单元11和定位单元12,所述采集单元11与所述规划模块2连接,所述定位单元12与所述规划模块2连接;所述采集单元11,用于获取机器人巡检过程中的前方物体信息,并将信息上传至所述规划模块2;所述定位单元12,用于获取机器人巡检过程中的实时定位信息,并将所述定位信息上传至所述规划模块2。
[0032]
进一步地,请参阅图2,所述采集单元11包括图像子单元111和距离子单元112,所述图像子单元111与所述规划模块2连接,所述距离子单元112与所述规划模块2连接;所述图像子单元111,用于获取机器人巡检过程中前方物体的图像信息,并将所述图像信息上传至所述规划模块2;所述距离子单元112,用于获取机器人巡检过程中前方物体与机器人的距离信息,并将所述距离信息上传至所述规划模块2。
[0033]
在本实施方式中,所述采集单元11用于获取机器人巡检过程前方物体的信息,并将信息上传至所述规划模块2,其中,所述采集单元11包括所述图像子单元111和所述距离子单元112,所述图像子单元111采用型号为ax700的摄像机,对机器人前方物体进行图像拍摄,并将拍摄图像上传至所述规划模块2,所述距离子单元112采用型号为dt500的距离传感器,感应机器人与前方物体的距离,并将距离信息上传至所述规划模块2,所述定位单元12,利用型号为gs07的gps进行定位,将机器人的实时位置信息上传至所述规划模块2,进而利用所述规划模块2计算出最新的实时行走路线,用于规避障碍物,避免机器人与障碍物发生硬物触碰而损坏,或因障碍物而便宜规划路线,对行走路线实时进行追踪,有利于保障机器人的正常巡检作业,促使巡检效果更佳。
[0034]
进一步地,请参阅图3,所述规划模块2包括图像识别单元21和路线更新单元22,所
述图像识别单元21与所述图像子单元111连接,所述路线更新单元22分别与所述图像识别单元21连接和所述行走模块3连接;所述图像识别单元21,用于获取所述图像信息,并将所述图像信息进行处理和识别,并将识别结果上传至所述路线更新单元22;所述路线更新单元22,用于获取所述识别结果、所述距离信息和所述定位信息,并通过计算规划出实时行走路线,并将所述实时行走路线上传至所述行走模块3。
[0035]
进一步地,请参阅图3,所述规划模块2还包括自主学习单元23,所述自主学习单元23与所述路线更新单元22连接;所述自主学习单元23,用于获取并存储所述实时行走路线,并将历史数据中所述识别结果、所述距离信息和所述定位信息进行对比,并将对比结果上传至所述路线更新单元22。
[0036]
在本实施方式中,所述图像识别单元21获取所述图像子单元111上传的图像信息,并将图像信息进行处理和识别,判断出机器人前方物体的轮廓线,并将识别结果上传至所述路线更新单元22,所述路线更新单元22获取物体的轮廓,再获取机器人与物体的距离和机器人的实时位置,重新计算出行走路线,绕开障碍物,再根据需求对巡检区域进行巡检,所述自主学习单元23,获取记录和存储实时行走路线和所述路线更新单元22的运行参数,其中,所述路线更新单元22的运行参数包括图像识别结果、机器人与前方物体的距离信息和机器人定位信息,进而当出现相同参数时,可直接调取出相应的实时行走路线,无需重复计算,减少计算负担,使规划路线效率更快,促使巡检效果更佳。
[0037]
进一步地,请参阅图4,所述行走模块3包括控制单元31和指令单元32,所述控制单元31与所述路线更新单元22连接,所述指令单元32与所述控制单元31连接;所述控制单元31,用于获取所述实时行走路线,并根据所述实时行走路线控制机器人行走;所述指令单元32,用于获取用户指令,并将所述用户指令转化为控制指令,以及将所述控制指令下达于所述控制单元31。
[0038]
进一步地,请参阅图4,所述指令单元32还包括语音子单元321和手势子单元322,所述语音子单元321与所述控制单元31连接,所述手势子单元322与所述控制单元31连接;所述语音子单元321,用于获取和识别用户语音信息,并将所述语音信息转化为语音控制指令,以及将所述语音控制指令下达于所述控制单元31;所述手势子单元322,用于获取和识别用户操作控制页面的操作信息,并将所述操作信息转化为手势控制指令,以及将所述手势控制指令下达于所述控制单元31。
[0039]
进一步地,请参阅图4,所述行走模块3还包括记录单元33,所述记录单元33与所述控制单元31连接;所述记录单元33,用于获取机器人运行数据,并将所述运行数据进行存储。
[0040]
在本实施方式中,所述控制单元31用于获取实时行走路线,并控制机器人的行走运行,驱动机器人进行巡检作业,所述指令单元32用于获取用户指令,进而用户可对机器人进行控制,其中,所述指令单元32包括所述语音子单元321和所述手势子单元322,所述语音子单元321通过型号为kz
‑
501b的语音采集器获得用户的语音信息,并通过语音识别技术将语音信息转化为控制指令,然后下达于所述控制单元31,由此控制机器人的运行,所述手势
子单元322,用于获取用户在操作页面上的操作内容,然后将其转化为控制指令,然后下达于所述控制单元31,由此用户可控制机器人的运行,采用两种形式对机器人进行控制或编程,使用方便,促使用户体验感更佳;所述记录单元33,获取所述控制单元31的运行数据,变将运行数据进行存储,便于后续对机器人的运行进行追溯,有利于对机器人的升级或维修,促使使用效果更佳,有利于提高机器人巡检效果。
[0041]
请参阅图5,一种巡检机器人行走路线追踪方法,包括以下步骤:s101:通过指令单元32下达巡检指令,机器人接收所述巡检指令,并开始巡检。
[0042]
s102:通过跟踪模块1实时获取机器人巡检过程中的前方物体信息,并将所述前方物体信息上传至规划模块2。
[0043]
s103:通过所述规划模块2根据获取的信息计算出实时行走路线,并将所述实时行走路线上传至控制单元31,所述控制单元31控制机器人规避障碍物。
[0044]
在本实施方式中,首先,操作人员通过所述指令单元32下达巡检指令,所述控制单元31接收用户指令,驱动机器人接收所述巡检指令,并开始巡检,然后,所述跟踪模块1利用摄像机获取机器人巡检过程中的前方物体图像,还利用距离传感器获取机器人与前方物体的距离和利用gps定位获取机器人的实时定位信息,并将获取的信息上传至所述规划模块2,所述规划模块2对获取的信息进行处理和识别,根据前方物体的轮廓、机器人与前方物体的距离和机器人的实时定位位置,制定出实时行走路线,使其能够规避障碍物,再按巡检需求对巡检区域进行巡检,并将实时行走路线上传至所述控制单元31,由所述控制单元31驱动机器人避开障碍物,实时对路线进行追踪,及时更改巡检路线,进而避免了机器人与硬物的触碰而损坏,或因障碍物而造成路线的偏移,促使巡检效果更佳。
[0045]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。