一种基于gru神经网络的火电厂智能控制模块及其运行方法
技术领域
1.本发明属于自动控制领域,具体涉及一种基于gru神经网络的火电厂智能控制模块及其运行方法。
背景技术:
2.现有的火电厂控制系统的控制逻辑往往是将被控量与设定值进行对比,经pid调节器运算后输出控制信号,最终使被控量等于或接近设定值。但这种控制系统的调试及运行主要存在以下三个问题。
3.1.一般pid控制逻辑在调试结束后即确定,随着机组老化或改造,控制逻辑的操作质量会下降,导致被控量的响应速度和稳定性下降。机组经过较长时间或偏差较大时,需要重新修改控制逻辑,增大了电厂的运行成本,且对机组的运行安全性有负面影响;
4.2.控制逻辑的设计调试,需要专业的自动化控制人员进行长时间的工况调整测试,且必须尽可能将运行工况在较大的被控量设定值范围内进行调试,以覆盖所有可能出现的运行工况。造成了大量的劳动力消耗,且带来了一定的安全风险。
5.3.人工调试难以利用电厂长期运行积累的历史数据,由人工调试得到的pid或模糊自适应pid控制逻辑,在机组运行参数动态调整时,往往表现出较大的不稳定性。在试验过程中,机组某些参数达到稳定,甚至需要长达1小时的时间,难以满足优化策略对参数控制的需求。
技术实现要素:
6.针对现有技术中存在的问题,本发明提供了一种基于gru神经网络的火电厂智能控制模块及其运行方法,通过gru神经网络对控制逻辑进行替换,利用了gru神经元对前一时刻信息可以选择性保留的特性进行目标参数控制,通过定期进行神经网络训练与更新,保持控制逻辑的最优状态,从而维持机组运行在最佳状态。
7.本发明是通过以下技术方案来实现:
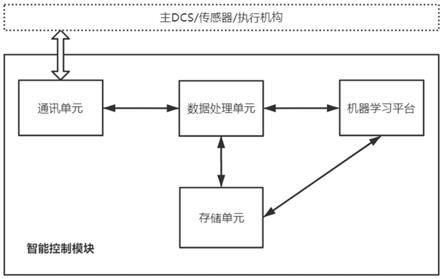
8.一种基于gru神经网络的火电厂智能控制模块,包括通讯单元、数据处理单元、存储单元和机器学习平台;
9.通讯单元,用于采集电厂运行的实时数据,并将机器学习平台计算得到的控制指令发送给dcs系统或执行机构;
10.数据处理单元,用于对通讯模块采集到的运行数据进行提取、清洗、转换、去重、整理、剔除,并按需发送给机器学习平台;
11.存储单元,用于存储处理后的运行数据及gru神经网络的权值信息;
12.机器学习平台,用于按计划对预先搭建的gru神经网络进行训练、测试,及对机组实时运行参数进行优化控制。
13.本发明进一步的改进在于,所述通讯单元通过三种方式采集机组的运行数据和发送控制指令,一是使用点对点的硬接线方式,二是使用modbus通信协议,三是与opc服务器
进行通讯获取及发送数据。
14.本发明进一步的改进在于,数据处理单元工作在三种状态下,一是对实时接收到的数据进行处理,其内容包括:添加时间列、对其时间列、计算移动平均值、计算拟合曲线梯度、判断数据异常和写出异常信息;二是在机器学习平台训练及测试时进行数据处理,其内容包括:数据提取、数据排序、归一化处理、数据校验、数据打乱和划分数据集;三是在转发控制指令时,对控制指令的时间间隔及被控量的变化幅度进行判断,实现闭锁增/减功能。
15.本发明进一步的改进在于,存储单元接收数据处理单元处理后的数据和机器学习平台训练得到的神经网络权值数据,并存储到相应的数据库中,在收到读数据指令时,存储单元提取已经存储的数据,发送给数据处理单元或机器学习平台。
16.本发明进一步的改进在于,机器学习平台由模型训练单元、模型更新单元、计划任务单元和控制计算单元组成。
17.本发明进一步的改进在于,模型训练单元负责对gru神经网络进行训练、测试及验证,模型更新单元对训练后的gru神经网络和当前的gru神经网络进行对比和更新,计划任务单元布置模型训练任务和模型更新任务,控制计算单元内置线性控制算法,且可以使用现有的gru神经网络模型及权值信息,计算目标参数对应的控制指令,实时发送给数据处理单元。
18.本发明进一步的改进在于,机器学习平台上搭载预先构建的gru神经网络模型,该神经网络模型包含三个隐藏层,且隐藏层的所有神经元均为gru神经元。
19.一种基于gru神经网络的火电厂智能控制模块的运行方法,包括以下步骤:
20.step1:机器学习平台初始化:初始化gru神经网络,并标记机器学习平台状态码为0xff;初始化计划任务单元,布置神经网络模型训练任务及神经网络模型更新任务,此时,gru神经网络模型的所有权值均为随机值,控制指令由控制计算单元内置线性控制算法生成;
21.step2:通讯单元获取机组运行数据,并实时转发给数据处理单元;
22.step3:数据处理单元接收到通讯单元转发的数据后,根据当前时间给数据添加时间标记,并通过插值算法获取固定时间间隔的运行数据,计算移动平均值、计算拟合曲线梯度,对运行数据进行清洗、整理,最后将计算得到的数据及原始数据发送给存储单元;
23.step4:存储单元接收到数据处理单元发送的运行数据,存储到时序数据库中;
24.step5:当本地时间到达计划任务单元布置的神经网络模型训练任务时刻时,开始神经网络模型训练,此时,机器学习平台首先向存储单元发送提取模型信息指令,获得神经网络模型的权值信息,然后向数据处理单元发送数据集请求指令,数据处理单元提取存储单元中存储的运行数据,并经数据排序、归一化处理、数据校验、数据打乱、划分数据集后发送给机器学习平台;
25.step6:机器学习平台中的模型训练单元获得训练数据集后,判断数据集数据量是否达到预设要求,如果达到预设要求,则开始模型训练,否则,结束神经网络模型训练任务;
26.step7:当本地时间到达计划任务单元布置的神经网络模型更新任务时刻且当前神经网络模型训练任务已经完成时,开始更新神经网络模型;
27.step8:机器学习平台中的模型更新单元获得验证数据集后,对训练后的模型和现有模型进行测试对比,如果训练后的模型的损失函数小于现有模型的损失函数,则更新存
储单元中的神经网络模型权值信息;
28.step9:模型更新单元完成一次gru神经网络模型权值更新后,将机器学习平台状态码置为0x00;
29.step10:当控制计算单元发现机器学习平台状态码为0x00时,开始加载gru神经网络模型及其权值信息,并使用gru神经网络计算控制指令;
30.step11:数据处理单元对机器学习平台计算得到的控制指令进行校核,当控制指令与当前执行机构状态的偏差超过给定阈值时,丢弃当前控制指令,否则,将该指令通过通讯单元发送给机组主dcs或执行机构完成控制操作。
31.与现有技术相比,本发明至少具有以下有益的技术效果:
32.本发明提出的一种基于gru神经网络的火电厂智能控制模块及其运行方法,通过使用gru神经网络对电厂供热的运行数据进行学习和处理,通过特有的更新们和重置们控制前一时刻的状态对后一时刻状态的影响程度,可以完全替代pid控制中的积分控制和微分控制,且相对于传统pid控制中的积分控制和微分控制,其具有更多的可训练参数,具有更高的灵活性。
33.本发明提出的一种基于gru神经网络的火电厂智能控制模块及其运行方法,通过定时进行神经网络训练及更新,保持控制逻辑处在最优的状态下,从而达到对机组的优化控制,降低火电厂运行的热耗及煤耗,降低电厂的运行调试成本,提高企业的经营效益。
附图说明
34.图1是本发明所述一种基于gru神经网络的火电厂智能控制模块的结构示意图;
35.图2是一种基于gru神经网络的火电厂智能控制模块中机器学习平台的结构示意图;
36.图3是一种基于gru神经网络的火电厂智能控制模块中gru神经元的结构示意图;
37.图4是一种基于gru神经网络的火电厂智能控制模块进行实时控制时的结构及流程示意图;
38.图5是一种基于gru神经网络的火电厂智能控制模块进行gru神经网络模型训练及更新时的流程示意图。
具体实施方式
39.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
40.以某电厂为例,其总装机容量400mw,其中1号机组为50mw带中间抽汽的背压机组,2号机组为超临界350mw抽汽凝汽式机组。热用户日常用汽量约280t/h,最大用汽量约400t/h。智能控制模块需要采集的运行参数有主蒸汽、四段抽汽的温度和压力、实时读取现场总负荷、中压供汽总量、低压供汽总量等,被控量为2号机低压供汽液控蝶阀开度。
41.如图1所示,本发明提供的一种基于gru神经网络的火电厂智能控制模块,包括通讯单元、数据处理单元、存储单元和机器学习平台。
42.通讯单元,用于采集电厂运行的实时数据,并将机器学习平台计算得到的控制指令发送给dcs系统;
43.数据处理单元,用于对通讯模块采集到的运行数据进行提取、清洗、转换、去重、整理、剔除,并按需发送给机器学习平台;
44.存储单元,用于存储处理后的运行数据及gru神经网络的权值信息;
45.机器学习平台,用于按计划对预先搭建的gru神经网络进行训练、测试,及对机组实时运行参数进行优化控制。
46.如图2所示,机器学习平台由模型训练单元、模型更新单元、计划任务单元和控制计算单元组成。模型训练单元负责对gru神经网络进行训练、测试及验证。模型更新单元对训练后的gru神经网络和当前的gru神经网络进行对比和更新,计划任务单元布置模型训练任务和模型更新任务,控制计算单元内置线性控制算法,且可以使用现有的gru神经网络模型及权值信息,计算目标参数对应的控制指令,实时发送给数据处理单元。
47.如图3所示为典型的gru神经元的结构示意图,当通过gru神经网络进行控制指令计算时,采集的运行参数在gru神经元中的计算公式为:
48.r
t
=σ(w
r
·
[h
t
‑1,x
t
])
[0049]
z
t
=σ(w
z
·
[h
t
‑1,x
t
])
[0050][0051][0052]
y
t
=σ(w
o
·
h
t
)
[0053]
其中,x、y为输入的运行参数和输出的控制指令对应的归一化数据,w
r
、w
z
、w
o
为神经网络中不同节点处的权值矩阵,σ和tanh为激活函数,下标t
‑
1和t分别表示前一时刻和当前时刻。
[0054]
如图4所示,当智能控制模块进行实时控制时,通讯单元采集运行数据,并转发给数据处理单元,数据处理单元读取前面一段时间内的运行数据和当前时刻的运行数据,经过添加时间列、对其时间列等预处理后组装成计算数据,发送给机器学习平台中的控制计算单元,控制计算单元判断机器学习平台状态码是否为0x00,如果是则从存储单元加载当前的gru神经网络权值信息,并使用gru神经网络进行控制指令计算,否则使用预置的线性控制算法进行控制指令计算。控制计算单元计算得到的控制指令会实时发送给数据处理单元,数据处理单元对控制指令的时间间隔及被控量的变化幅度进行判断,当被控量变化速率和控制指令变化速率满足设定条件时,控制指令发送给通讯单元,最终实现对被控量即2号机低压供汽液控蝶阀开度的控制。当被控量变化速率和控制指令变化速率不满足设定条件时,控制指令被丢弃,等待下一个控制指令的转发,等待期间,控制指令维持上一时刻的数值不变。
[0055]
如图5所示,当智能控制模块进行模型训练时,首先,机器学习平台中的模型训练单元从存储单元中加载当前的gru神经网络权值信息;数据处理单元从存储单元中提取历史运行数据,并组装成训练集和测试数据集,并将训练集发送给模型训练单元,测试集发送给模型更新单元;模型训练单元对训练数据集数据量进行判断,如果数据量不满足训练要求,则退出本次模型训练任务,如果数据量满足训练要求,则开始训练gru神经网络,获得更新后的gru神经网络权值及损失函数信息;训练完成后,模型更新单元加载新模型,并计算新模型与当前的gru神经网络模型的损失函数,如果新模型的损失函数更小,则更新gru神
经网络模型权值信息,否则,退出本次模型更新任务。
[0056]
以上所述仅为本发明具体实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构组成的智能控制模块,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。