1.本发明属于仿生机器人技术领域,具体涉及一种仿生蛇形机器人的机械结构。
背景技术:
2.仿生机器人是指依据仿生学原理设计的性能优越的机电系统,多为仿人、仿生物和生物机器人三大类。
3.近年来,随着仿生技术的高速发展,仿生学技术在机器人领域的应用愈发广泛,仿生机器人愈发智能化。在抢险救灾方面,我国着重发展地震救灾机器人、火灾救援机器人、水灾救援机器人、矿难救灾机器人等类型,而利用仿生学原理制造抢险救灾机器人的实例较少。
技术实现要素:
4.本发明的目的是提供一种仿生蛇形机器人的机械结构,能够实现模仿蛇类动物的运动形态。
5.本发明采用的技术方案是:
6.一种仿生蛇形机器人的机械结构,包括行走机构和转向机构;行走机构为两个,分别为第一行走机构和第二行走机构,第一行走机构位于机器人的头部,第二行走机构位于机器人的尾部,通过两个行走机构,使机器人进行前后移动;转向机构位于两个行走机构之间,转向机构至少为一个,转向机构包括转向机构外壳、差动装置和翻转装置,差动装置和翻转装置均安装在转向机构外壳中,差动装置安装在靠近第一行走机构的一侧,差动装置的输出端伸出转向机构外壳与第一行走机构转动连接,翻转装置安装在靠近第二行走机构的一侧,翻转装置的输出端伸出转向机构外壳与第二行走机构连接;差动装置带动转向机构相对行走机构做抬起、下落的运动,或带动转向机构相对行走机构做左、右摆动的运动,翻转装置带动转向机构相对行走机构做翻转运动。
7.这样使两个行走机构位于机器人的首、尾两端,用于支持机器人进行前、后运动,机器人在进行前后方向转换时,只需要使相应方向的行走机构工作,就可以完成转换前后方向的动作,所以具有转向灵活的优点。通过设置转向机构外壳,使差动装置和翻转装置安装在转向机构外壳中,当差动装置动作,带动转向机构相对行走机构做抬起、下落的运动,或带动转向机构相对行走机构做左、右摆动,翻转装置带动转向机构相对行走机构做翻转动作,由于要做翻转的转动动作,所以翻转装置的输出轴和转向机构外壳是转动连接,差动装置的输出端伸出转向机构外壳与第一行走机构转动连接,翻转装置的旋转法兰盘伸出转向机构外壳与第二行走机构连接,是为了使机器人整体连接为一个条状结构,用于模仿蛇类的形状。
8.进一步的是,转向机构有两个,第一行走机构尾端和第一个转向机构差动装置的输出端转动连接,第一个转向机构翻转装置的输出端和第二个转向机构差动装置的输出端连接;第二个转向机构翻转装置的输出端和第二行走机构的首端连接。
9.这样设计是为了使第一个转向机构的翻转装置工作时,带动第一个转向机构在第一行走机构与第二个转向机构之间进行翻转,第二个转向机构的翻转装置工作时,带动第二个转向机构在第一个转向机构与第二行走机构之间进行翻转。
10.进一步的是,差动装置包括第一舵机、第一齿轮传动组件、第二舵机、第二齿轮传动组件、第一伞齿轮、伞齿轮轴、齿轮安装架和旋转架,第一舵机和第二舵机均安装在转向机构外壳中,两者的输出轴平行设置,且朝向相反,分别位于转向机构外壳长度方向的两侧;第一齿轮传动组件包括传动轮一、传动轮二、传动轮三、第二伞齿轮和第一舵机输出齿轮,第一舵机输出齿轮固定安装在第一舵机输出轴上,传动轮一与第一舵机输出齿轮啮合,传动轮二与传动轮一啮合,传动轮三和传动轮二啮合,传动轮一、传动轮二、传动轮三的转轴均与第一舵机输出轴平行,且分别各自转动连接在对应位置的转向机构外壳上,第二伞齿轮和传动轮三固定在同一个转轴上,第二伞齿轮与第一伞齿轮啮合,第一伞齿轮固定在伞齿轮轴上,伞齿轮轴与第二伞齿轮的转轴垂直设置;第二齿轮传动组件包括传动轮四、传动轮五、传动轮六、第三伞齿轮和第二舵机输出齿轮,第二舵机输出齿轮固定安装在第二舵机输出轴上,传动轮四与第二舵机输出齿轮啮合,传动轮五与传动轮四啮合,传动轮六与传动轮五啮合,传动轮四、传动轮五、传动轮六的转轴均与第二舵机输出轴平行,且分别各自转动连接在对应位置的转向机构外壳上,第三伞齿轮和传动轮六固定在同一个转轴上,第三伞齿轮与第一伞齿轮啮合,第三伞齿轮与第二伞齿轮的轴线共线;齿轮安装架的一端与第一伞齿轮转动连接,另一端与第二伞齿轮转动连接,伞齿轮轴转动连接在齿轮安装架上,伞齿轮轴穿过齿轮安装架与位于上方的旋转架固定连接。
11.通过设置第一舵机和第二舵机,分别为第一齿轮传动组件和第二齿轮传动组件的转动提供动力,第一舵机输出齿轮安装在第一舵机输出轴上,用于传动第一舵机输出轴的转动,通过设置第一齿轮传动组件,使第一舵机输出齿轮的转动,通过传动轮依次传递给第二伞齿轮,;第二舵机输出齿轮安装在第二舵机输出轴上,用于传递第二舵机输出轴的转动,通过设置第二齿轮传动组件,使第二舵机输出齿轮的转动,通过传动轮依次传递给第三伞齿轮,第二伞齿轮和第三伞齿轮分别和第一伞齿轮啮合,每个传动轮均固定在相应转轴的一端,转轴的另一端转动连接在转向机构外壳上,并伸出转向机构外壳,通过止推环使转轴限定在转向机构外壳上,防止转轴转动后脱离转向机构外壳。
12.当第二伞齿轮和第三伞齿轮转动方向和转动速率相同时,使第一伞齿轮、第二伞齿轮和第三伞齿轮之间处于锁死状态,使第一伞齿轮、第二伞齿轮、第三伞齿轮、伞齿轮轴、齿轮安装架和旋转架整体随第二伞齿轮和第三伞齿轮的转轴转动,在第一行走机构的限制作用下,第一个转向机构相对第一行走机构做抬起或下落动作,在第一行走机构和第一个转向机构的共同限制作用下,第二个转向机构相对第一个转向机构做抬起或下落动作。
13.当第二伞齿轮和第三伞齿轮转动速率相同、转动方向相反时,第二伞齿轮和第三伞齿轮带动第一伞齿轮转动,第一伞齿轮的转动,使和第一伞齿轮固定连接的伞齿轮轴发生转动,使固定连接在伞齿轮轴上的旋转架也发生转动,由于齿轮安装架和伞齿轮轴是转动连接,所以伞齿轮轴的转动将不会使齿轮安装架转动,所以通过使第一伞齿轮转动,可以使旋转架做相应的转动,在第一行走机构的限制作用下,第一个转向机构在旋转架的带动下,相对第一行走机构左右摆动,在第一行走机构和第一个转向机构的共同限制作用下,第二个转向机构在旋转架的带动下,相对第一个转向机构左右摆动。
14.进一步的是,翻转装置包括第三舵机、第一输出轴、传动轮七和旋转法兰盘,第三舵机安装在转向机构外壳中,第三舵机的输出轴与第一舵机的输出轴、伞齿轮轴均垂直设置,第三舵机输出齿轮和传动轮七啮合,第一输出轴一端和传动轮七固定连接,第一输出轴的另一端转动连接在转向机构外壳,并伸出转向机构外壳和旋转法兰盘固定连接,第一输出轴与第三舵机的输出轴平行设置,旋转法兰盘与旋转架的竖板连接或与第二行走机构连接。
15.通过设置第三舵机,并使第三舵机输出齿轮安装在第三舵机的输出轴上,为第三舵机输出齿轮的转动提供动力,通过设置传动轮七,并使传动轮七固定在第一输出轴上,使第三舵机输出齿轮的转动,传递给和其啮合的传动轮七,传动轮七将转动传递给第一输出轴,第一输出轴位于转向机构外壳外侧的一端上连接旋转法兰,第一输出轴的转动,将带动旋转法兰盘转动,所以旋转法兰盘作为翻转装置的输出端,通过旋转法兰盘的旋转,在与转向机构连接的行走机构或相邻转向机构限制作用下,使转向机构相对行走机构或相邻转向机构做翻转运动。
16.具体的是,齿轮安装架呈u形结构,具有两个竖板和一个水平板,一个竖板与第二伞齿轮转动连接,另一个竖板与第三伞齿轮转动连接,伞齿轮轴与水平板转动连接,伞齿轮轴穿过水平板与位于齿轮安装架上方的旋转架固定连接。
17.当第二伞齿轮和第三伞齿轮转动方向和转动速率相同时,使第一伞齿轮、第二伞齿轮和第三伞齿轮之间处于锁死状态,使第一伞齿轮、第二伞齿轮、第三伞齿轮、伞齿轮轴、齿轮安装架和旋转架整体随第二伞齿轮和第三伞齿轮的转轴转动。
18.进一步的是,旋转架呈l形结构,具有一个水平板和一个竖板,旋转架的水平板与伞齿轮轴固定连接,旋转架的竖板与第一行走机构转动连接或与相邻转向机构翻转装置的输出端固定连接。
19.通过设置旋转架,一方面使旋转架作为差动装置的输出端,另一方面旋转架竖板或和第一行走机构转动连接,或和相邻的转向机构的旋转法兰盘连接,其水平板连接在相应差动装置的伞齿轮轴上,所以旋转架也具有连接功能。
20.进一步的是,仿生蛇形履带式机器人的机械结构还包括中间连接件,中间连接件为两个,一个连接在第一行走机构的尾端,一个连接在第二行走机构的首端,旋转架的竖板与第一行走机构的中间连接件转动连接,旋转法兰盘与第二行走机构的中间连接件连接。
21.通过设置中间连接件,使行走机构和转向机构之间可以更容易和牢固的连接。
22.进一步的是,第一舵机和第二舵机上下层叠设置,第一舵机位于第二舵机的下方。
23.通过将第一舵机和第二舵机上下层叠设置,可以节约转向机构外壳的内部空间,可以将转向机构外壳做的相对小一些,减少转向机构的重量,更容易翻转。
24.进一步的是,行走机构包括无齿履带轮、无齿履带轮轴、履带、履带中间支撑架、有齿履带轮、有齿履带轮轴、减速器和电机,有齿履带轮轴为一个,有齿履带轮轴的两端各连接一个有齿履带轮,无齿履带轮轴为两个,每个无齿履带轮轴的两端各安装一个无齿履带轮,有齿履带轮轴位于两个无齿履带轮轴之间,有齿履带轮和无齿履带轮分别通过有齿履带轮轴和无齿履带轮轴,安装在履带中间支撑架上;履带为两个,每个履带均为一个封闭的环状结构,每个履带均套装在位于同一侧的有齿履带轮和无齿履带轮上,并通过两个无齿履带轮将履带张紧;电机和减速器均设置在履带中间支撑架上,电机通过减速器驱动有齿
履带轮轴和有齿履带轮,使行走机构移动。
25.通过设置电机、减速器,为行走机构提供行走的动力,通过有齿履带轮带动履带转动,从而带动行走机构移动。
26.本发明的有益效果是:
27.本发明能够实现通过行走机构带动机器人移动,通过转向机构使机器人完成抬起、下落翻转的运动,能够实现模仿蛇类等动物的行走状态。
附图说明
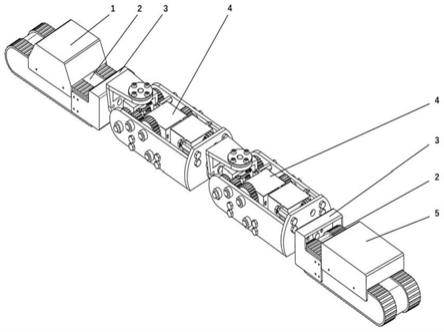
28.图1为本发明的整体结构示意图。
29.图2为转向机构的结构示意图。
30.图3为差动装置和翻滚装置的结构示意图。
31.图4为行走机构的结构示意图。
32.图5为中间连接件的结构示意图。
33.图6为履带两侧支撑架连接在履带中间支撑架的结构示意图。
34.图7为履带中间支撑架的结构示意图。
35.图8为中间连接件和履带两侧支撑架连接在一起的结构示意图。
36.图中零部件、部件及编号:传感器安装壳1、行走机构2、中间连接件3、转向机构4、单片机安装壳5、无齿履带轮6、履带7、履带中间支撑架8、有齿履带轮9、减速器10、电机11、中间连接架12、履带两侧支撑架13、旋转架14、齿轮安装架15、转向机构外壳16、第一舵机17、第二舵机18、第三舵机19、旋转法兰盘20、第二伞齿轮21、传动轮三22、传动轮二23、传动轮一24、第一舵机输出齿轮25、传动轮七26、第三舵机输出齿轮27、第二舵机输出齿轮28、止推环29、传动轮四30、传动轮五31、传动轮六32、转轴33、伞齿轮轴34、第三伞齿轮35、第一伞齿轮36。
具体实施方式
37.下面给出本发明的具体实施方法,并结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.实施例一:
39.如图1所示,一种仿生蛇形机器人的机械结构,包括行走机构2、转向机构4和中间连接件3;行走机构2为两个,分别为第一行走机构和第二行走机构,第一行走机构位于机器人的头部,第一行走机构上能够用来安装传感器安装壳1,在传感器安装壳1内可以安装不同种类的传感器,如红外传感器等,第二行走机构位于机器人的尾部,第二行走机构能够用来安装单片机安装壳5,在单片机安装壳5内可以安装单片机,可以用于控制机器人的移动,通过两个行走机构2,使机器人进行前后移动。
40.如图2所示,转向机构4位于两个行走机构2之间,转向机构4包括转向机构外壳16、差动装置和翻转装置,差动装置和翻转装置均安装在转向机构外壳16中,差动装置安装在靠近第一行走机构的一侧,翻转装置安装在靠近第二行走机构的一侧,差动装置带动转向
机构4相对行走机构做抬起、下落的运动,或带动转向机构4相对行走机构做左、右摆动的运动,翻转装置带动转向机构4相对行走机构做翻转运动。
41.如图3所示,差动装置包括第一舵机17、第一齿轮传动组件、第二舵机18、第二齿轮传动组件、第一伞齿轮36、伞齿轮轴34、齿轮安装架15和旋转架14,第一舵机17和第二舵机18均安装在转向机构外壳16中,且两者的输出轴平行设置,且分别位于转向机构外壳16长度方向的两侧;第一舵机17和第二舵机18上下层叠设置,第一舵机17位于第二舵机18的下方,第一齿轮传动组件包括传动轮一24、传动轮二23、传动轮三22、第二伞齿轮21和第一舵机输出齿轮25,第一舵机输出齿轮25固定安装在第一舵机输出轴上,传动轮一24与第一舵机输出齿轮25啮合,传动轮二23与传动轮一24啮合,传动轮三22和传动轮二23啮合,传动轮一24、传动轮二23、传动轮三22的转轴33均与第一舵机输出轴平行,且分别各自转动连接在对应位置的转向机构外壳16上,第二伞齿轮21和传动轮三22固定在同一个转轴上,第二伞齿轮21与第一伞齿轮36啮合,第一伞齿轮36固定在伞齿轮轴34上,伞齿轮轴34与第二伞齿轮21的转轴垂直设置;第二齿轮传动组件包括传动轮四30、传动轮五31、传动轮六32、第三伞齿轮35和第二舵机输出齿轮28,第二舵机输出齿轮固定安装在第二舵机输出轴上,传动轮四30与第二舵机输出齿轮啮合,传动轮五31与传动轮四30啮合,传动轮六32与传动轮五31啮合,传动轮四30、传动轮五31、传动轮六32的转轴33均与第二舵机输出轴平行,且分别各自转动连接在对应位置的转向机构外壳16上,第三伞齿轮35和传动轮六32固定在同一个转轴上,第三伞齿轮35与第一伞齿轮36啮合;齿轮安装架15的一端与第一伞齿轮36转动连接,另一端与第二伞齿轮21转动连接,伞齿轮轴34转动连接在齿轮安装架15上,伞齿轮轴34穿过齿轮安装架15与位于上方的旋转架14固定连接,每个传动轮均固定在相应转轴33的一端,转轴33的另一端转动连接在转向机构外壳16上,并伸出转向机构外壳16,通过止推环29使转轴33限定在转向机构外壳16上,防止转轴33转动后脱离转向机构外壳16。
42.翻转装置包括第三舵机19、第一输出轴、传动轮七26和旋转法兰盘20,第三舵机19安装在转向机构外壳16中,第三舵机19的输出轴与第一舵机的输出轴、伞齿轮轴均垂直设置,第三舵机19的输出轴上固定连接第三舵机输出齿轮27,第三舵机输出齿轮27和传动轮七26啮合,第一输出轴一端和传动轮七26固定连接,第一输出轴的另一端转动连接在转向机构外壳16上,并伸出转向机构外壳16和旋转法兰盘20固定连接,第一输出轴与第三舵机19的输出轴平行设置,旋转法兰盘20与旋转架14的竖板连接或与第二行走机构连接。
43.转向机构4为两个,第一个转向机构的旋转法兰盘20和第二个转向机构的旋转架14连接。
44.如图5所示,中间连接件3为两个,一个连接在第一行走机构的尾端,另一个连接在第二行走机构的首端,第一个转向机构的旋转架14与第一行走机构的中间连接件3转动连接,第二个转向机构的旋转法兰盘20与第二行走机构的中间连接件3连接。
45.齿轮安装架15呈u形结构,具有两个竖板和一个水平板,一个竖板与第二伞齿轮21转动连接,另一个竖板与第三伞齿轮35转动连接,伞齿轮轴34与水平板转动连接,伞齿轮轴34穿过水平板与位于齿轮安装架15上方的旋转架14固定连接。
46.旋转架14呈l形结构,具有一个水平板和一个竖板,旋转架14的水平板与伞齿轮轴34固定连接,旋转架14的竖板与第一行走机构转动连接或与相邻转向机构翻转装置的旋转法兰盘20固定连接。
47.如图4、图6、图7和图8所示,行走机构包括无齿履带轮6、无齿履带轮轴、履带7、履带中间支撑架8、有齿履带轮9、有齿履带轮轴、减速器10、电机11、中间连接架12、电机架和履带两侧支撑架13,有齿履带轮轴为一个,有齿履带轮轴的两端各连接一个有齿履带轮9,无齿履带轮轴为两个,每个无齿履带轮轴的两端各安装一个无齿履带轮6,有齿履带轮轴位于两个无齿履带轮轴之间,有齿履带轮9和无齿履带轮6分别通过有齿履带轮轴和无齿履带轮轴,安装在履带中间支撑架8上;履带7为两个,每个履带7均为一个封闭的环状结构,每个履带7均套装在位于同一侧的有齿履带轮9和无齿履带轮6上,并通过两个无齿履带轮6将履带7张紧。
48.减速器10设置在中间连接架12上,中间连接架12安装在履带中间支撑架8上,中间连接架12上安装电机架,电机架上安装电机11,履带两侧支撑架13为两个,且分别位于行走机构2长度方向的两侧,并分别和中间连接架12通过螺纹连接,电机11通过减速器10驱动有齿履带轮轴和有齿履带轮9,使行走机构2移动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。