技术特征:
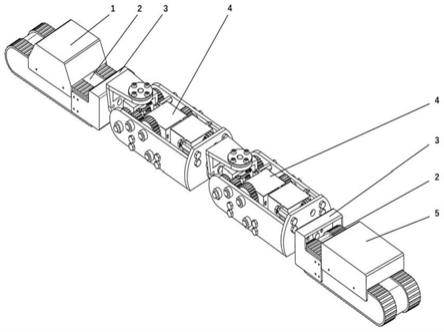
1.一种仿生蛇形机器人的机械结构,其特征在于,包括行走机构(2)和转向机构(4);所述行走机构(2)为两个,分别为第一行走机构和第二行走机构,第一行走机构位于机器人的头部,第二行走机构位于机器人的尾部,通过两个行走机构,使机器人进行前后移动;所述转向机构(4)位于两个行走机构(2)之间,转向机构(4)至少为一个,转向机构(4)包括转向机构外壳(16)、差动装置和翻转装置,差动装置和翻转装置均安装在转向机构外壳(16)中,差动装置安装在靠近第一行走机构的一侧,差动装置的输出端伸出转向机构外壳(16)与第一行走机构转动连接,翻转装置安装在靠近第二行走机构的一侧,翻转装置的输出端伸出转向机构外壳(16)与第二行走机构连接;差动装置带动转向机构(4)相对行走机构做抬起、下落的运动,或带动转向机构(4)相对行走机构做左、右摆动的运动,翻转装置带动转向机构(4)相对行走机构做翻转运动。2.根据权利要求1所述的一种仿生蛇形机器人的机械结构,其特征在于,转向机构(4)有两个,第一行走机构(2)尾端和第一个转向机构差动装置的输出端转动连接,第一个转向机构(4)翻转装置的输出端和第二个转向机构(4)差动装置的输出端连接;第二个转向机构(4)翻转装置的输出端和第二行走机构(2)的首端连接。3.根据权利要求2所述的一种仿生蛇形机器人的机械结构,其特征在于,所述差动装置包括第一舵机(17)、第一齿轮传动组件、第二舵机(18)、第二齿轮传动组件、第一伞齿轮(36)、伞齿轮轴(34)、齿轮安装架(15)和旋转架(14),第一舵机(17)和第二舵机(18)均安装在转向机构外壳(16)中,两者的输出轴平行设置,且朝向相反,分别位于转向机构外壳长度方向的两侧;第一齿轮传动组件包括传动轮一(24)、传动轮二(23)、传动轮三(22)、第二伞齿轮(21)和第一舵机输出齿轮(25),第一舵机输出齿轮固定安装在第一舵机输出轴上,传动轮一(24)与第一舵机输出齿轮啮合,传动轮二(23)与传动轮一(24)啮合,传动轮三(22)和传动轮二(23)啮合,传动轮一、传动轮二、传动轮三的转轴均与第一舵机输出轴平行,且分别各自通过转轴转动连接在对应位置的转向机构外壳(16)上,第二伞齿轮(21)和传动轮三(22)固定在同一个转轴上,第二伞齿轮(21)与第一伞齿轮(36)啮合,第一伞齿轮(36)固定在伞齿轮轴(34)上,伞齿轮轴与第二伞齿轮(21)的转轴垂直设置;第二齿轮传动组件包括传动轮四(30)、传动轮五(31)、传动轮六(32)、第三伞齿轮(35)和第二舵机输出齿轮(28),第二舵机输出齿轮固定安装在第二舵机输出轴上,传动轮四(30)与第二舵机输出齿轮啮合,传动轮五(31)与传动轮四(30)啮合,传动轮六(32)与传动轮五(31)啮合,传动轮四(30)、传动轮五(31)、传动轮六的转轴均与第二舵机输出轴平行,且分别各自通过转轴转动连接在对应位置的转向机构外壳(16)上,第三伞齿轮(35)和传动轮六(32)固定在同一个转轴上,第三伞齿轮(35)与第一伞齿轮(36)啮合,第三伞齿轮与第二伞齿轮的轴线共线;齿轮安装架(15)的一端与第一伞齿轮(36)转动连接,另一端与第二伞齿轮(21)转动连接,伞齿轮轴(34)转动连接在齿轮安装架(15)上,伞齿轮轴(34)穿过齿轮安装架(15)与位于上方的旋转架(14)固定连接。4.根据权利要求3所述的一种仿生蛇形机器人的机械结构,其特征在于,所述翻转装置包括第三舵机(19)、第一输出轴、传动轮七(26)和旋转法兰盘(20),第三舵机(19)安装在转
向机构外壳(16)中,第三舵机的输出轴与第一舵机的输出轴、伞齿轮轴均垂直设置,第三舵机的输出轴上固定连接第三舵机输出齿轮(27),第三舵机输出齿轮(27)和传动轮七(26)啮合,第一输出轴一端和传动轮七(26)固定连接,第一输出轴的另一端转动连接在转向机构外壳(16)上,并伸出转向机构外壳(16)和旋转法兰盘(20)固定连接,第一输出轴与第三舵机的输出轴平行设置,旋转法兰盘(20)与旋转架(14)或第二行走机构连接。5.根据权利要求4所述的一种仿生蛇形机器人的机械结构,其特征在于,齿轮安装架(15)呈u形结构,具有两个竖板和一个水平板,一个竖板与第二伞齿轮(21)转动连接,另一个竖板与第三伞齿轮(35)转动连接,伞齿轮轴(34)与水平板转动连接,伞齿轮轴(34)穿过水平板与位于齿轮安装架(15)上方的旋转架(14)固定连接。6.根据权利要求5所述的一种仿生蛇形机器人的机械结构,其特征在于,旋转架(14)呈l形结构,具有一个水平板和一个竖板,旋转架(14)的水平板与伞齿轮轴(34)固定连接,旋转架(14)的竖板与第一行走机构转动连接或与相邻转向机构翻转装置的旋转法兰盘固定连接。7.根据权利要求6所述的一种仿生蛇形机器人的机械结构,其特征在于,所述仿生蛇形履带式机器人的机械结构还包括中间连接件(3),所述中间连接件(3)为两个,一个连接在第一行走机构的尾端,另一个连接在第二行走机构的首端,旋转架的竖板与第一行走机构的中间连接件转动连接,旋转法兰盘(20)与第二行走机构的中间连接件连接。8.根据权利要求1所述的一种仿生蛇形机器人的机械结构,其特征在于,第一舵机(17)和第二舵机(18)上下层叠设置,第一舵机(17)位于第二舵机(18)的下方。9.根据权利要求1所述的一种仿生蛇形机器人的机械结构,其特征在于,所述行走机构包括无齿履带轮(6)、无齿履带轮轴、履带(7)、履带中间支撑架(8)、有齿履带轮(9)、有齿履带轮轴、减速器(10)和电机(11),有齿履带轮轴为一个,有齿履带轮轴的两端各连接一个有齿履带轮(9),无齿履带轮轴为两个,每个无齿履带轮轴的两端各安装一个无齿履带轮(6),有齿履带轮轴位于两个无齿履带轮轴之间,有齿履带轮(9)和无齿履带轮(6)分别通过有齿履带轮轴和无齿履带轮轴,安装在履带中间支撑架(8)上;履带(7)为两个,每个履带(7)均为一个封闭的环状结构,每个履带(7)均套装在位于同一侧的有齿履带轮(9)和无齿履带轮(6)上,并通过两个无齿履带轮(6)将履带(7)张紧;电机(11)和减速器(10)均设置在履带中间支撑架(8)上,电机(11)通过减速器(10)驱动有齿履带轮轴和有齿履带轮(9),使行走机构(2)移动。
技术总结
本发明公开了一种仿生蛇形机器人的机械结构,包括行走机构和转向机构;行走机构为两个,分别为第一行走机构和第二行走机构,第一行走机构位于机器人的头部,第二行走机构位于机器人的尾端;转向机构位于两个行走机构之间,转向机构至少为一个,转向机构包括转向机构外壳、差动装置和翻转装置,差动装置和翻转装置均安装在转向机构外壳中,差动装置的输出端伸出转向机构外壳与第一行走机构转动连接,翻转装置的输出端伸出转向机构外壳与第二行走机构转动连接;差动装置带动转向机构相对行走机构做抬起、下落、向左或向右摆动,翻转装置带动转向机构相对行走机构做翻转运动,所以提供了一种能够实现模仿蛇类行走状态的机器人。供了一种能够实现模仿蛇类行走状态的机器人。供了一种能够实现模仿蛇类行走状态的机器人。
技术研发人员:黄涵钰 苑明海 戴舰龙 郑良 翟政林
受保护的技术使用者:河海大学
技术研发日:2021.09.26
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。