1.本发明涉及全息检测技术领域,尤其涉及一种改变观察矢量的数字全息三维形貌测量方法及装置。
背景技术:
2.在生命科学、机械微加工、微电子和材料科学等领域蓬勃发展的今天,对三维物体的几何特征测量提出了更高的要求,迫切需要高分辨率、快速的三维成像手段和高精度的测量方法。微结构精密加工中非破坏性的表面形貌测量对其设计、测试和表征都非常重要,其形貌测量方法越来越受到人们的关注。
3.物体表面形貌测量的技术种类非常多,并且发展迅速,通常情况下可以将其分为接触式测量和光学非接触式测量两类方法。在接触式测量中以三坐标测量机(coordinate measuring machine)为代表,在测量过程中,坐标测量机使用机械或光学探头进行三维运动,通过探头在物体表面逐点接触来收集物体的几何特征信息,具有高智能化、测量范围大、操作简单等特点。但是,探头需要在被测物体上逐点扫描,使得测量速度降低和存在损伤物体表面的可能,并且在给定点上测量切平面与曲面的方向是很困难的。光学非接触测量方法主要有机器视觉检测法、光学干涉计量法等。机器视觉法发展迅速,其通过图像采集装置将待测物体转换成图像信号,提取特征点并进行处理之后得到被测物体的形态信息,具有快速灵活的特点,但测量精度受光照和所采集图像的质量影响严重且二维图像平面不能完全体现三维信息。干涉计量法能够对物体进行检测主要是通过光波的干涉原理来实现的,其基本思路是通过改变由照明方向和观察方向构成的灵敏度矩阵使得物体表面形貌的光学相位发生变化,从而形成干涉条纹。随着激光技术和光电记录器件的发展,基于干涉计量衍生出了双光束干涉、多光束干涉、外差干涉和全息等多种方法。
4.在光学测量领域中,数字全息技术是基于光波干涉和衍射原理的一种三维信息表达技术,它可以较好的记录物体的波前信息,能够满足上述要求的同时还具有合理的灵敏度和动态测量范围,是一种较为理想的物体三维形貌测量技术。目前的的数字全息形貌测量方法主要有多波长法、双折射率方法和旋转照明光改变照明方向的方法,改变观察方向的方法目前还未见报道。
技术实现要素:
5.本发明的目的在于提供一种改变观察矢量的数字全息三维形貌测量方法,可以实现对三维物体表面形貌的高精度、快速实时检测,具体包括以下步骤:
6.s1、对采集系统中传感器的位置进行调整:
7.对于单一传感器采集系统:通过燕尾式平移台调整传感器探测面与电控旋转台的相对位置,使传感器探测面中心位于电控旋转台的转轴上。
8.对于双传感器同时采集的系统:其中一个传感器通过燕尾式平移台调整传感器探测面与电控旋转台的相对位置,使传感器探测面中心位于电控旋转台的转轴上,另一传感
器放置在合束镜的另外一侧,并调整其位置使得两传感器接收到的信息除左右颠倒外其余都一致,即对两传感器进行复位调整,调整好之后旋转其中一个传感器,使得两传感器的的观察方向存在微小差异,并且夹角已知。
9.s2、启动所述激光器,获取发生干涉的参考光和反射光的全息信息;所述分光组件将所述激光器发出的光分为两束,第一束光经由物光光路照射待测物体,所述待测物体对照射的第一束光进行反射;第二束光作为参考光由参考光光路传输,参考光光路传输的参考光与待测物体的反射光在光路合成组件中汇合后射入采集系统,记录下发生干涉的参考光和物光的全息信息,并以数字化的形式储存在计算机中。
10.s3、对所述的数字全息图进行重建,通过数据处理得到待测物体的三维形貌:
11.s31、通过计算机模拟光波的衍射过程对采集系统中拍摄得到的两幅数字全息图进行重建,得到用于提取相位信息的复振幅形式的物光场信息。
12.s32、基于预先确定的参数信息和所述角度信息,对所述物光场信息进行处理,得到去除了倾斜分量后只包含形貌信息的相位差。
13.s33、根据相位差与表面形貌之间的线性关系得到待测物体的三维形貌。
14.进一步的,本发明所述待测物体的三维形貌为:
[0015][0016]
式中:λ为激光波长,δθ为采集传感器的探测平面绕y轴原地旋转的角度,为两幅全息图重建相位去除了倾斜分量后只包含形貌信息的相位差。
[0017]
进一步的,对于单一传感器采集系统:传感器在初始位置拍摄下一幅数字全息图后,通过计算机向旋转台控制器发送指令,使得电控旋转台带动传感器旋转,改变其观察方向,此时传感器再拍摄下一幅数字全息图,由此得到两幅存在微小差异的数字全息图;对于双传感器采集系统:通过电控旋转台旋转使得带动其中一个传感器旋转,使得两传感器的相对观察方向存在微小差异,此时,两传感器同时拍摄下两幅数字全息图。
[0018]
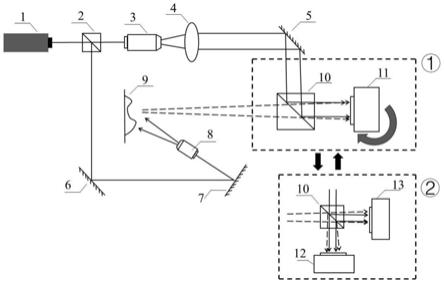
本发明的另一目的在于提供所述方法所用测量装置,包括激光器1、分光棱镜2、第一显微物镜3、第一准直透镜4、第一平面反射镜5、反射镜ⅰ6反射镜ⅱ7、第二显微物镜8、待测物体9、合束镜10、采集传感器ⅰ11、采集传感器ⅱ12、采集传感器ⅲ13;激光器1发出的光经过分光棱镜2后分成两束光,第一束光穿过第一显微物镜3和第一准直透镜4进行扩束准直,准直的光经过第二平面反射镜5反射至合束镜10;分光棱镜2分出的第二束光经过反射镜ⅰ6反射镜ⅱ7的反射之后穿过第二显微物镜8,经第二显微物镜8扩束后照射在待测物体9上,经待测物体9反射的光达到合束镜10;通过采集系统采集发生干涉的参考光和物光的全息信息,所述采集系统为单一传感器采集或者双传感器采集。
[0019]
进一步的,本发明所述单一传感器采集的采集传感器ⅰ11放置在合束镜10光线射出两个面的其中一个面后面,采集传感器ⅰ11通过燕尾式平移台与电控旋转台连接。
[0020]
进一步的,本发明所述双传感器采集的采集传感器ⅱ12和采集传感器ⅲ13分别放置在合束镜10光线射出的两个面后面,采集传感器ⅱ12和采集传感器ⅲ13通过燕尾式平移台与电控旋转台连接。
[0021]
本发明所述燕尾式平移台和电控旋转台为现有结构。
[0022]
本发明的有益效果
[0023]
(1)本发明的装置结构紧凑,无需使用成像透镜避免了透镜像差对测量的影响,且对于双传感器采集的方案,两个传感器可以同时拍摄,减少了测量的时间,可达到高精度、快速实时的三维物体表面形貌检测要求。
[0024]
(2)本发明的方法通过数字全息重建算法恢复出物光场相位,利用不同观察矢量下物光场的干涉相位,去除倾斜分量后得到只包含物体形貌的相位差信息,根据相位差与表面形貌的线性关系得到三维物体的表面形貌信息;通过上述方式,本发明能够对漫反射物体实现高精度、非接触、快速实时的形貌测量,通过设置合理的旋转角度,还可以避免相位解包裹过程。
[0025]
(3)通过燕尾式平移台对传感器和电控旋转台转轴的相对位置进行调整,使得在旋转时不会引入平移量,然后通过旋转传感器得到两幅观察矢量存在微小差异的数字全息图,对不同观察矢量下传感器记录的全息图重建,并对重建地相位信息进行处理得到只包含物体形貌信息的解包裹相位,通过相位差与表面形貌的线性关系得到三维物体的表面形貌信息;通过合理设置传感器的旋转角度(观察方向的改变量)可以实现高精度、快速实时的三维物体表面形貌测量。
附图说明
[0026]
图1为本发明所述测量装置的结构示意图;
[0027]
图2为合束镜工作原理示意图;
[0028]
图3为单一传感器采集三维结构示意图;
[0029]
图4为半球形工件形貌测量结果图;
[0030]
图5为假牙牙冠的形貌测量结果图。
[0031]
附图标记说明:1
‑
激光器;2
‑
分光棱镜;3
‑
第一显微物镜;4
‑
第一准直透镜;5
‑
第一平面反射镜;6
‑
反射镜ⅰ;7
‑
反射镜ⅱ;8
‑
第二显微物镜;9
‑
待测物体;10
‑
合束镜;11
‑
采集传感器ⅰ;12
‑
采集传感器ⅱ;13
‑
采集传感器ⅲ。
具体实施方式
[0032]
下面结合附图和具体实施例对本发明作进一步详细说明,但本发明的保护范围并不限于所述内容。
[0033]
实施例1
[0034]
本实施例提供一种改变观察矢量的数字全息三维形貌测量装置,可实现航天领域所用工件的形貌测量,参照图1所示,包括激光器1、分光棱镜2、第一显微物镜3、第一准直透镜4、第一平面反射镜5、反射镜ⅰ6反射镜ⅱ7、第二显微物镜8、待测物体9、合束镜10、采集传感器ⅰ11、采集传感器ⅱ12、采集传感器ⅲ13;激光器1发出的激光经过分光棱镜2后分成两束光;所述分光棱镜2分出的一束光穿过第一显微物镜3和第一准直透镜4进行扩束准直后,准直的光经过第二平面反射镜5反射至合束镜10。分光棱镜2分出的第二束光经过反射镜6和第二平面反射镜7的反射之后穿过第二显微物镜8,光经显微物镜扩束后照射在待测物体9上,经待测物体9反射的光达到合束镜10。通过采集系统采集发生干涉的参考光和物光的全息信息,所述采集系统为单一传感器采集或者双传感器采集。
[0035]
单一传感器采集方案如图1的虚线框1所示,采集传感器ⅰ11放置在合束镜10光线射出两个面的其中一个面后面,采集传感器ⅰ11通过燕尾式平移台与电控旋转台连接。
[0036]
双传感器采集方案如图1的虚线框2所示,将采集传感器ⅱ12和采集传感器ⅲ13分别放置在合束镜10光线射出的两个面后面,并通过控制组件使得两传感器的相对观察方向存在微小差异。
[0037]
如图2所示,合束镜10将待测物体反射的物光进行透射和反射,将由第二平面反射镜5反射的参考光进行透射和反射,透过的物光和反射的参考光发生干涉,反射的物光和透过的参考光发生干涉,并被采集传感器ⅰ11或采集传感器ⅱ12和采集传感器ⅲ13拍摄传输至计算设备,进而经由计算设备的处理获得待测物体的三维形貌;在实际应用中,传感器可以记录发生干涉的全息信息即全息图,并以数字化的形式储存在计算设备中。
[0038]
在本实施例中,采集系统包括:计算设备和与该计算设备连接的采集传感器ⅰ11或采集传感器ⅱ12和采集传感器ⅲ13,采集传感器ⅰ11或采集传感器ⅱ12和采集传感器ⅲ13通过燕尾式平移台与电控旋转台连接,如图3所示;所述电控旋转台用于调整传感器的观察角度,所述燕尾式平移台用于调整传感器与电控旋转台之间的相对位置关系。
[0039]
在实际应用中,图1中所示的传感器可包括:ccd(charge coupled device,电荷耦合元件)或cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)。
[0040]
在本实施例中,激光器通过分光组件分出两束光,一束作为物光,另一束作为参考光,参考光经扩束准直后射入合束镜,物光经扩束后照射待测物体,待测物体的反射光和参考光通过合束镜后发生干涉并射入到传感器,传感器采集干涉的信息,即传感器记录下全息图,并以数字化的形式储存在计算设备中。
[0041]
上述装置结构紧凑,无需使用成像透镜避免了透镜像差对测量的影响,且对于双传感器采集方案,单次拍摄采集即可,减少了测量的时间,可达到高精度、快速实时的三维物体表面形貌检测要求。
[0042]
使用所述三维形貌测量装置对一个半径为16mm的航空领域用半球工件进行三维形貌测量实验,传感器绕y轴旋转角度δθ为0.5度,不同观察角度数字全息重建后,相位差结果如图4a所示,图4b示出了将相位差结果去除倾斜项并根据线性关系转化为形貌的结果,与所测量的半球工件真实值具有很高的一致性。
[0043]
实施例2
[0044]
本实施例提供一种基于上述数字全息三维形貌测量装置的测量方法,可实现中药材三七的形貌测量,所用装置与实施例1相同,具体包括下述的步骤:
[0045]
s1、对采集系统中传感器的位置进行调整:在本实施例中,可通过前述的电控旋转台和燕尾式平移台调整传感器的位置以及观察角度信息。
[0046]
s2、启动所述激光器,获取发生干涉的参考光和反射光的全息信息。
[0047]
采用单一传感器采集系统进行采集:传感器在初始位置拍摄下一幅数字全息图后,通过计算机向旋转台控制器发送指令,使得电控旋转台带动传感器旋转,改变其观察方向,此时传感器再拍摄下一幅数字全息图,由此得到两幅存在微小差异的数字全息图,以数字化的形式储存在计算机中。
[0048]
s3、对所述的数字全息图进行重建,通过数据处理得到待测物体的三维形貌。
[0049]
举例来说,在步骤s3中,本实施例的方法可包括下述的子步骤:
[0050]
s31、通过计算机模拟光波的衍射过程对采集系统中拍摄得到的两幅数字全息图进行重建,得到用于提取相位信息的复振幅形式的物光场信息。
[0051]
也就是说,可通过传感器记录下全息信息,重建过程可为对全息图进行衍射计算,重建得到复振幅形式的物光场信息。该物光场包含强度和相位信息,下述可基于物光场提取待测物体对应的相位信息。
[0052]
s32、基于预先确定的参数信息和所述角度信息,对所述物光场信息进行处理,得到去除了倾斜分量后的解包裹相位差信息。
[0053]
本实施例中,预先确定的参数信息可包括:激光波长,采集传感器的旋转角度等。在进行数字全息重建后,可根据上述预先确定的参数信息构造倾斜因子来抵消旋转时引入的倾斜相位因子,实现预处理。在重建平面xoy上,假设振幅为a0,与z轴夹角为
‑
θ的光波复振幅可以表示为:
[0054]
e(x,y)=a0exp[
‑
jkh
x
(x,y)sinθ]
[0055]
式中,h
x
(x,y)为重建平面的x坐标值,k为波矢k=2π/λ,数字全息重建平面光波场可以写为:
[0056][0057]
式中,指重建平面光波场u(x,y)的相位分布,a(x,y)为重建平面光波场u(x,y)的振幅。
[0058]
当传感器的探测平面绕y轴原地旋转角度δθ后进行拍摄时,其观察矢量发生变化,重建平面光波场可以写为:
[0059][0060]
式中,为重建平面光波场u
′
(x,y)的相位分布,a
′
(x,y)为重建平面光波场u
′
(x,y)的振幅。
[0061]
通过u(x,y)和u
′
(x,y)可以得到:
[0062][0063]
然后利用反正切函数对相位进行提取,就可得到去除倾斜项后的相位差
[0064]
同样,也可以先对两幅全息图重建后的相位做差,提取出相位差得到包裹相位差然后对包裹相位差进行解包裹计算得到解包裹相位差,再构造倾斜相位项
‑
ksinδθh
x
(x,y)来进行消除。
[0065]
s33、根据相位差与表面形貌之间的线性关系得到待测物体的三维形貌。
[0066]
具体地,由上式得到的只包含物体形貌信息的相位差和形貌关系得待测物体三维形貌为:
[0067][0068]
由此就可以得到待测物体的三维形貌信息。
[0069]
具体地,中药材三七在种植时受产地、种植年限、采收时间、肥料等因素的影响,其外形多样。其药材的外观形貌特征对中药材的等级划分起着重要影响,直接关系到三七的
商品价值。该方法可以快速实现对中药材三七的外观形貌检测,以可视化的结果在计算机中进行显示,实现对中药材三七等级的智能化划分。
[0070]
实施例3
[0071]
本实施例提供一种基于上述数字全息三维形貌测量装置的测量方法,可实现假牙的形貌测量,所用装置与实施例1相同,与实施例2的区别在于本实施例使用双传感器采集进行实时形貌测量:
[0072]
(1)对双传感器实时采集系统进行校正:其中一个传感器通过燕尾式平移台调整传感器探测面与电控旋转台的相对位置,使传感器探测面中心位于电控旋转台的转轴上,另一传感器放置在合束镜的另外一侧,并调整其姿态使得两传感器接收到的信息除存在镜像关系外其余都一致,即进行复位调整。
[0073]
(2)启动采集系统开始实时采集:系统校准完成之后通过计算机发送命令使得电控旋转台旋转带动其中一个传感器旋转,使得两传感器的的观察方向存在微小差异,并且夹角(旋转角度)已知;此时,两传感器同时拍摄下两幅数字全息图,以数字化的形式储存在计算机中。
[0074]
(3)对所获全息图进行重建处理,得到待测物体三维形貌。
[0075]
由衍射理论可知,假设激光照射到待测物上时,物光场为o(x,y),物光场传播至传感器的光场分布为u(x0,y0),参考光传播至传感器的光场分布为r(x0,y0),两束光发生干涉并被传感器记录,形成数字全息图即全息信息;全息图的光强分布可以表示为:
[0076]
h(x0,y0)=|u(x0,y0) r(x0,y0)|2[0077]
=|u(x0,y0)|2 |r(x0,y0)|2 u
*
(x0,y0)r(x0,y0) u(x0,y0)r
*
(x0,y0)
[0078]
式中,*表示共轭,全息图的光强被分为三个部分,前两项为零级衍射项,第三项为
“‑
1”级像,第四项为“ 1”级像。
[0079]
数值重建过程是将全息图h(x0,y0)在自由空间中进行传播来获得。
[0080]
当重建距离等于记录距离d时,根据菲涅尔衍射积分公式,重建的复振幅为:
[0081][0082]
式中,λ为光波长,k=2π/λ为波数,强度和相位可由下式得:
[0083]
i(x,y)=|u(x,y)|2[0084][0085]
具体地,设照明光(即激光器1发出的照射到待测物体9上的光)在x0oz平面内照射物体,并且与z轴负方向的夹角为锐角θ
s
往x0轴正方向照射,则照明矢量当传感器的探测平面垂直于x0oz平面,并且垂直于z轴,即传感器正对待测物体在xy平面进行拍摄,则观察矢量未进行旋转的传感器所获全息图进行重建后的相位可以表示为:
[0086][0087]
式中,为散射物体的随机相位,变化范围
‑
π~π;h
z
(x,y)为待测物体点(x,y)沿z
轴的表面高度,即为所需求解的结果;h
x
(x,y),h
y
(x,y)则分别为待测物体点的x,y轴坐标值,称为倾斜分量。
[0088]
当传感器的探测平面绕y轴原地旋转角度δθ后进行拍摄时,其观察矢量发生变化,观察矢量重建平面光波场u
′
(x,y)的相位分布可以表示为:
[0089][0090]
当δθ较小时,可以认为物体表面的散射特性变化不大,有故两个状态作相位差时,有:
[0091][0092]
式中,h
z
(x,y)为三维物体的表面形貌信息,
‑
k sinδθh
x
(x,y)为倾斜分量,与空间坐标x成线性关系;去除倾斜项后有:
[0093][0094]
则物体表面形貌可以表示为:
[0095][0096]
至此,通过微小旋转ccd记录下两幅不同观察矢量的全息图,分别进行重建,将重建后的相位差解包裹并减去倾斜分量后,带入相位差与表面高度的关系方程便可解调出待测物体的三维形貌信息。
[0097]
本实施例采用双传感器实时采集系统对假牙的牙冠表面形貌进行测量,实验中其中一传感器相对于另一传感器的旋转角度δθ为0.8度,实时拍摄下两幅数字全息图后,对两幅全息图重建后作相位差,相位差结果如图5a所示,图5b示出了计算所得的假牙牙冠形貌结果,其结果很好的反映了假牙牙冠的形貌信息,可为牙医在进行修补牙齿以及制作假牙的过程中提供指导。
[0098]
与现有技术相比,本实施例中的方法通过计算设备/控制器控制旋转台的旋转来进行标定,从而使传感器改变角度,对不同观察角度下传感器记录的全息图重建,得到不同观察矢量差下的相位差图,去除倾斜项后就可转化为待测物体表面的三维形貌。通过合理设置传感器的旋转角度可以实现高精度、快速实时的三维物体表面形貌测量。
[0099]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例,或结合软件和硬件方面的实施例的形式;而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。