1.本发明属于物料盘点技术领域,具体涉及一种粉料罐内物料自动盘点装置及方法。
背景技术:
2.容器内物料检测盘点是物料盘点的重要一环,而对于容器内物料监测已有许多成熟的技术,如雷达、激光、电容等技术,但现有技术进行粉料料位检测时存在偏差大、需要经常维护等缺点。
3.目前,在混凝土预拌厂中,生产所用的物料需要每日盘点,除上述方法外,更多的是采用人工敲粉料罐判断料位,预估现有存量,并进行手工记录整理而得,其盘点方法原始、误差大以及无法实时自动盘点且存在安全事故。
4.因此,如何对粉料罐内物料进行自动盘点,且提高盘点的准确度,是本领域技术人员有待解决的技术问题。
技术实现要素:
5.本发明的目的是为了对粉料罐内物料进行自动盘点,且提高盘点的准确度,提出了一种粉料罐内物料自动盘点装置。
6.本发明的技术方案为:一种粉料罐内物料自动盘点装置,包括:
7.移动轨道,设置于所述粉料罐外侧,且所述移动轨道的一端固定于所述粉料罐的底端,所述移动轨道的另一端固定于所述粉料罐的顶端;
8.超声料位检测模块,设置于所述移动轨道上,用于对粉料罐中物料料位进行回声定位;
9.进一步地,所述超声料位检测模块包括超声发生器、超声接收器和数据传输模块。
10.进一步地,还包括终端设备,用于接收所述超声料位检测模块发送的数据,以及数据显示、报警提示和报表生成。
11.进一步地,还包括运动控制模块,用于控制所述超声料位检测模块进行运动并实时记录超声料位检测模块的实时位置。
12.进一步地,所述运动控制模块包括动力输出模块、运动控制器和数据传输模块。
13.相应的,本申请还提出了一种粉料罐内物料自动盘点方法,应用于上述的装置中,所述方法包括;
14.s1、通过运动控制模块带动超声料位检测模块沿移动轨道匀速移动;
15.s2、当所述超声料位检测模块检测到数据波动时,记录所述超声料位检测模块当前位置,所述当前位置是所述超声料位检测模块在所述粉料罐高度中的位置;
16.s3、基于所述当前位置确定所述粉料罐中物料量。
17.进一步地,通过移动终端向所述运动控制模块和所述超声料位检测模块发送启动指令。
18.进一步地,所述移动终端通过预设时间间隔向所述运动控制模块和所述超声料位检测模块发送启动指令。
19.与现有技术相比,本发明具备以下有益效果:
20.本发明装置包括移动轨道,设置于所述粉料罐外侧,且所述移动轨道的一端固定于所述粉料罐的底端,所述移动轨道的另一端固定于所述粉料罐的顶端;超声料位检测模块,设置于所述移动轨道上,用于对粉料罐中物料料位进行回声定位;所述超声料位检测模块包括超声发生器、超声接收器和数据传输模块;还包括终端设备,用于接收所述超声料位检测模块发送的数据,以及数据显示、报警提示和报表生成,实现了对粉料罐内物料进行自动盘点,且提高了物料盘点的准确度。
附图说明
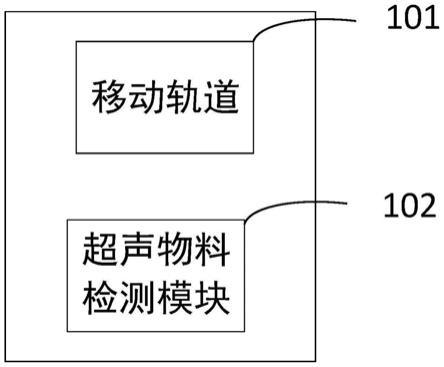
21.图1所示为本发明实施例提供的一种粉料罐内物料自动盘点装置的结构示意图;
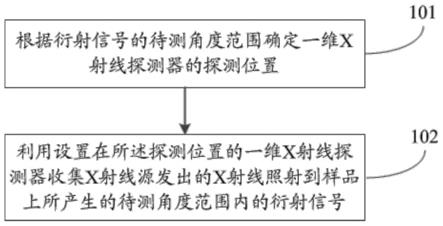
22.图2所示为本发明实施例一种粉料罐内物料自动盘点方法的流程示意图。
具体实施方式
23.下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
24.本申请提出了一种粉料罐内物料自动盘点装置,如图1所示为本申请实施例提出的一种粉料罐内物料自动盘点装置的结构示意图,包括:
25.移动轨道101,设置于所述粉料罐外侧,且所述移动轨道的一端固定于所述粉料罐的底端,所述移动轨道101的另一端固定于所述粉料罐的顶端;
26.超声料位检测模块102,设置于所述移动轨道101上,用于对粉料罐中物料料位进行回声定位;
27.具体的,移动轨道101控制超声料位检测模块102与粉料罐壁的间隙大小不变,同时超声料位检测模块102设置有与移动轨道101相配合的限位机构。
28.在本申请实施例中,所述超声料位检测模块102包括超声发生器、超声接收器和数据传输模块。
29.在本申请实施例中,还包括终端设备,用于接收所述超声料位检测模块102发送的数据,以及数据显示、报警提示和报表生成。
30.在本申请实施例中,还包括运动控制模块,用于控制所述超声料位检测模块102进行运动并实时记录超声料位检测模块102的实时位置。
31.在本申请实施例中,所述运动控制模块包括动力输出模块、运动控制器和数据传输模块。
32.具体的,运动控制模块带动超声料位检测模块102的运动速度与数据采集频率成正相关,数据采集频率高,则提高运动速度,数据采集频率低,则降低运动速度。
33.相应的,本申请实施例还提出了一种粉料罐内物料自动盘点方法,所述方法包括;
34.步骤s1、通过运动控制模块带动超声料位检测模块102沿移动轨道101匀速移动;
35.步骤s2、当所述超声料位检测模块102检测到数据波动时,记录所述超声料位检测模块当前位置,所述当前位置是所述超声料位检测模块在所述粉料罐高度中的位置;
36.步骤s3、基于所述当前位置确定所述粉料罐中物料量。
37.在本申请实施例中,通过移动终端向所述运动控制模块和所述超声料位检测模块102发送启动指令。
38.在本申请实施例中,所述移动终端通过预设时间间隔向所述运动控制模块和所述超声料位检测模块102发送启动指令。
39.超声料位检测模块102通过当前位置计算物料料位,并发送至移动终端显示,
40.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
技术特征:
1.一种粉料罐内物料自动盘点装置,其特征在于,包括:移动轨道,设置于所述粉料罐外侧,且所述移动轨道的一端固定于所述粉料罐的底端,所述移动轨道的另一端固定于所述粉料罐的顶端;超声料位检测模块,设置于所述移动轨道上,用于对粉料罐中物料料位进行回声定位;2.如权利要求1所述的粉料罐内物料自动盘点装置,其特征在于,所述超声料位检测模块包括超声发生器、超声接收器和数据传输模块。3.如权利要求1所述粉料罐内物料自动盘点装置,其特征在于,还包括终端设备,用于接收所述超声料位检测模块发送的数据,以及数据显示、报警提示和报表生成。4.如权利要求1所述的粉料罐内物料自动盘点装置,其特征在于,还包括运动控制模块,用于控制所述超声料位检测模块进行运动并实时记录超声料位检测模块的实时位置。5.如权利要求4所述的粉料罐内物料自动盘点装置,其特征在于,所述运动控制模块包括动力输出模块、运动控制器和数据传输模块。6.一种粉料罐内物料自动盘点方法,其特征在于,应用于如权利要求1
‑
5所述的装置中,所述方法包括;s1、通过运动控制模块带动超声料位检测模块沿移动轨道匀速移动;s2、当所述超声料位检测模块检测到数据波动时,记录所述超声料位检测模块当前位置,所述当前位置是所述超声料位检测模块在所述粉料罐高度中的位置;s3、基于所述当前位置确定所述粉料罐中物料量。7.如权利要求6所述的粉料罐内物料自动盘点方法,其特征在于,通过移动终端向所述运动控制模块和所述超声料位检测模块发送启动指令。8.如权利要求6所述的粉料罐内物料自动盘点方法,其特征在于,所述移动终端通过预设时间间隔向所述运动控制模块和所述超声料位检测模块发送启动指令。
技术总结
本发明公开了一种粉料罐内物料自动盘点装置,包括移动轨道,设置于所述粉料罐外侧,且所述移动轨道的一端固定于所述粉料罐的底端,所述移动轨道的另一端固定于所述粉料罐的顶端;超声料位检测模块,设置于所述移动轨道上,用于对粉料罐中物料料位进行回声定位;所述超声料位检测模块包括超声发生器、超声接收器和数据传输模块;还包括终端设备,用于接收所述超声料位检测模块发送的数据,以及数据显示、报警提示和报表生成,实现了对粉料罐内物料进行自动盘点,且提高了物料盘点的准确度。且提高了物料盘点的准确度。且提高了物料盘点的准确度。
技术研发人员:王军 刘离 涂玉林 陈泓任 高育欣
受保护的技术使用者:中建西部建设建材科学研究院有限公司
技术研发日:2021.10.12
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。