技术特征:
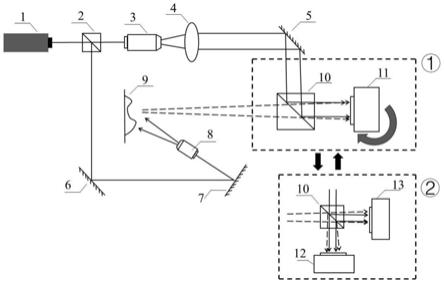
1.一种改变观察矢量的数字全息三维形貌测量方法,其特征在于,具体包括以下步骤:s1、对采集系统中传感器的位置进行调整:对于单一传感器采集系统:通过燕尾式平移台调整传感器探测面与电控旋转台的相对位置,使传感器探测面中心位于电控旋转台的转轴上;对于双传感器同时采集的系统:其中一个传感器通过燕尾式平移台调整传感器探测面与电控旋转台的相对位置,使传感器探测面中心位于电控旋转台的转轴上,另一传感器放置在合束镜的另外一侧,并调整其位置使得两传感器接收到的信息除左右颠倒外其余都一致,即对两传感器进行复位调整,调整好之后旋转其中一个传感器,使得两传感器的的观察方向存在微小差异,并且夹角已知;s2、启动所述激光器,获取发生干涉的参考光和反射光的全息信息;s3、对所述的数字全息图进行重建,通过数据处理得到待测物体的三维形貌:s31、通过计算机模拟光波的衍射过程对采集系统中拍摄得到的两幅数字全息图进行重建,得到用于提取相位信息的复振幅形式的物光场信息;s32、基于预先确定的参数信息和所述角度信息,对所述物光场信息进行处理,得到去除了倾斜分量后只包含形貌信息的相位差;s33、根据相位差与表面形貌之间的线性关系得到待测物体的三维形貌。2.根据权利要求1所述改变观察矢量的数字全息三维形貌测量方法,其特征在于:待测物体的三维形貌为:式中:λ为激光波长,δθ为采集传感器的探测平面绕y轴原地旋转的角度,为两幅全息图重建相位去除了倾斜分量后只包含形貌信息的相位差。3.权利要求1或2所述方法所用测量装置,其特征在于:包括激光器(1)、分光棱镜(2)、第一显微物镜(3)、第一准直透镜(4)、第一平面反射镜(5)、反射镜ⅰ(6)反射镜ⅱ(7)、第二显微物镜(8)、待测物体(9)、合束镜(10)、采集传感器ⅰ(11)、采集传感器ⅱ(12)、采集传感器ⅲ(13);激光器(1)发出的光经过分光棱镜(2)后分成两束光,第一束光穿过第一显微物镜(3)和第一准直透镜(4)进行扩束准直,准直的光经过第二平面反射镜5反射至合束镜(10);分光棱镜(2)分出的第二束光经过反射镜ⅰ(6)反射镜ⅱ(7)的反射之后穿过第二显微物镜(8),经第二显微物镜(8)扩束后照射在待测物体(9)上,经待测物体(9)反射的光达到合束镜(10);通过采集系统采集发生干涉的参考光和物光的全息信息,所述采集系统为单一传感器采集或者双传感器采集。4.根据权利要求3所述测量装置,其特征在于:单一传感器采集的采集传感器ⅰ(11)放置在合束镜(10)光线射出两个面的其中一个面后面,采集传感器ⅰ(11)通过燕尾式平移台与电控旋转台连接。5.根据权利要求3所述测量装置,其特征在于:双传感器采集的采集传感器ⅱ(12)和采集传感器ⅲ(13)分别放置在合束镜(10)光线射出的两个面后面,采集传感器ⅱ(12)和采集传感器ⅲ(13)通过燕尾式平移台与电控旋转台连接。
技术总结
本发明公开一种改变观察矢量的数字全息三维形貌测量方法及装置,属于全息检测技术领域。本发明所述方法为对采集系统中传感器的观察方向进行调整,其中采集系统包括单一传感器采集系统和双传感器同时采集的系统;启动所述激光器,获取发生干涉的参考光和反射光的全息信息;对所述的数字全息图进行重建,通过数据处理得到待测物体的三维形貌。本发明利用不同观察矢量下物光场的干涉相位,去除倾斜分量后得到只包含物体形貌的相位差信息,根据相位差与表面形貌的线性关系得到三维物体的表面形貌信息;实现高精度、非接触、快速实时的形貌测量,通过设置合理的旋转角度,还可以避免相位解包裹过程。解包裹过程。解包裹过程。
技术研发人员:宋庆和 王世荣 夏海廷 郭荣鑫 张长兴
受保护的技术使用者:昆明理工大学
技术研发日:2021.09.08
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。