1.本发明涉及医疗机械技术领域,特别涉及一种七自由度解耦主操作手。
背景技术:
2.微创外科手术一般也称为介入式手术,它是通过在体表切开数个细小的切口(或依靠人体天然官腔),借助于视觉显示系统的图像引导,将手术器械通过体表切口伸入体内进行治疗或诊断而完成的手术。微创手术技术使得大部分的外科手术告别了开放式的手术模式,将机器人技术应用于医疗外科手术已经变得越来越流行,机器人在操作稳定性、快捷性和精确性方面具有显著的优势,将机器人技术融入外科手术中,可以改进医生的手术环境,缩短患者的恢复时间。目前,现有的微创手术机器人通过医生手动操作主操作手,主操作手会将医生的动作传递至机器人的执行机构,现有的主操作手大多通过人机交互接收医生动作,通过电信号将动作传递至机器人的执行机构,由于动作经过多次信号转化,动作执行时存在偏差的可能性,无法实现精确的动作传导和力反馈,同时,部分主操作手存在各自由度相互干涉无法解耦的情况。
技术实现要素:
3.本发明提供了一种七自由度解耦主操作手,其目的是为了实现解决现有主操作手需要多次转化动作信号以及部分主操作手各自由度相互干涉的问题。
4.为了达到上述目的,本发明的实施例提供了一种七自由度解耦主操作手,包括:
5.手部剪切关节、手腕偏移关节、手腕屈伸关节、前臂旋转关节、前臂翻转关节和手肘屈伸关节逐一连接;所述前臂旋转关节与前臂翻转关节之间设置有水平位移驱动装置;
6.所述手部剪切关节、手腕偏移关节、手腕屈伸关节、前臂旋转关节、前臂翻转关节、手肘屈伸关节和所述水平位移驱动装置均设置有两根钢丝,两根钢丝在对应关节或装置的两个方向传动。
7.其中,所述手部剪切关节由手指活动机构和手掌定位机构组成,所述手指活动机构通过剪切转轴转动地设置在所述手掌定位机构顶部,所述剪切转轴上绕设有相连的两根剪切驱动钢丝。
8.其中,所述手掌定位机构的前端活动地插设有手指固定机构,所述手掌定位机构的底部开设有限位槽,所述限位槽设置有锁紧螺母,所述手指固定机构通过所述锁紧螺母固定安装在所述手掌定位机构前端。
9.其中,所述手腕偏移关节由第一支架机构和所述手掌定位机构组成,所述手掌定位机构的后端通过偏移转轴转动地设置在所述第一支架机构的上部,所述偏移转轴上绕设有相连的两根偏移驱动钢丝。
10.其中,所述剪切驱动钢丝穿过所述偏移转轴的中心通孔引入所述第一支架机构,所述剪切驱动钢丝和偏移驱动钢丝均通过第一支架导向轮组导向引出所述第一支架机构;所述剪切驱动钢丝位于所述偏移转轴中心通孔的部分为腱鞘结构。
11.其中,所述手腕屈伸关节由前环机构和所述第一支架机构组成,所述第一支架机构的下部通过手腕屈伸转轴转动地设置在所述前环机构的前端底部,所述手腕屈伸转轴上绕设有相连的两根手腕屈伸驱动钢丝,所述手腕屈伸驱动钢丝通过第一支架底部导向轮组导向引出所述第一支架机构。
12.其中,所述前臂旋转关节由臂托机构和所述前环机构组成,所述臂托机构上固定设置有弧形公导轨,所述前环机构的后端固定设置有内圈弧形母导轨和外圈弧形母导轨,所述弧形公导轨滑动地设置在所述内圈弧形母导轨和外圈弧形母导轨之间;所述弧形公导轨沿圆周方向设置有弧形齿条,所述前环机构转动地设置有锥齿轮,所述锥齿轮的圆心处穿设有芯轴,所述锥齿轮与所述弧形齿条啮合传动,所述芯轴上绕设有两根相连的前臂旋转驱动钢丝,所述前臂旋转驱动钢丝通过前臂旋转导向轮组导向引出所述前环机构。
13.其中,所述水平位移驱动装置由臂托底座和所述臂托机构组成,所述臂托机构通过两组滑轨滑动地设置在所述所述臂托底座上,所述臂托底座的侧面转动地穿设有位移驱动轴,所述位移驱动轴的端头设置有驱动齿轮,所述臂托机构的侧面设置有驱动齿条,所述驱动齿轮与驱动齿条啮合,所述位移驱动轴上绕设有两根相连的位移驱动钢丝。
14.其中,所述前臂翻转关节由第二支架机构和所述臂托底座组成,所述臂托底座通过翻转轴管转动地连接所述第二支架机构的上部,所述翻转轴管上绕设有两根相连的翻转驱动钢丝,所述位移驱动钢丝由所述翻转轴管的中心通孔引入所述第二支架机构,所述位移驱动钢丝和翻转驱动钢丝均通过第二支架导向轮组导向引出所述第二支架机构;所述位移驱动钢丝位于所述翻转轴管中心通孔的部分为腱鞘结构。
15.其中,所述手肘屈伸关节由操作手底座和所述第二支架机构组成,所述第二支架机构的底部通过屈伸轴管转动地设置在所述操作手底座上,所述屈伸轴管上绕设有两根相连的手肘屈伸驱动钢丝,所述手肘屈伸驱动钢丝通过第二支架底部导向轮组导向引出所述第二支架机构。
16.本发明的上述方案有如下的有益效果:
17.本发明的所述的七自由度解耦主操作手具有六个旋转自由度和一个平移自由度,每个自由度都对应设置有两根钢丝在一个自由度上的两个方向传动,当主操作手动作时钢丝能够将动作传递至机器人操作端,当机器人操作端运动时能够通过钢丝进行力反馈,本发明的七个自由度完全解耦,主操作手操纵时各自由度互不干涉,可独立运动。
附图说明
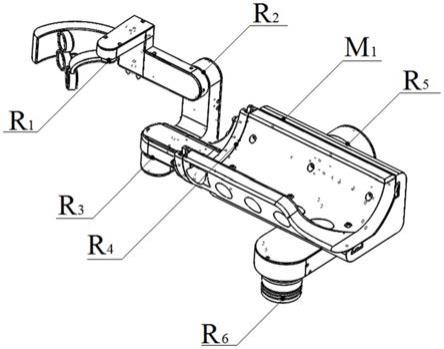
18.图1为本发明的七自由度解耦主操作手的自由度示意图;
19.图2为本发明的七自由度解耦主操作手的整体结构示意图;
20.图3为本发明的七自由度解耦主操作手的手部剪切自由度示意图;
21.图4为本发明的七自由度解耦主操作手的手部剪切自由度传动示意图;
22.图5为本发明的七自由度解耦主操作手的手腕偏移自由度示意图;
23.图6为本发明的七自由度解耦主操作手的手腕屈伸自由度示意图;
24.图7为本发明的七自由度解耦主操作手的前臂旋转自由度示意图;
25.图8为本发明的七自由度解耦主操作手的前臂旋转自由度传动示意图;
26.图9为本发明的七自由度解耦主操作手的水平位移自动度示意图;
27.图10为本发明的七自由度解耦主操作手的水平位移自由度传动示意图;
28.图11为本发明的七自由度解耦主操作手的水平位移自由度及前臂翻转自由度传动示意图一;
29.图12为本发明的七自由度解耦主操作手的水平位移自由度及前臂翻转自由度传动示意图二;
30.图13为本发明的七自由度解耦主操作手的水平位移自由度及前臂翻转自由度传动示意图三;
31.图14为本发明的七自由度解耦主操作手的水平位移自由度及前臂翻转自由度传动示意图四;
32.图15为本发明的七自由度解耦主操作手的手肘屈伸自由度传动示意图。
33.【附图标记说明】
34.r1‑
手部剪切关节;r2‑
手腕偏移关节;r3‑
手腕屈伸关节;r4‑
前臂旋转关节;r5‑
前臂翻转关节;r6‑
手肘屈伸关节;m1‑
水平位移驱动装置;1
‑
手指活动机构;2
‑
手掌定位机构;3
‑
剪切转轴;4
‑
剪切驱动钢丝;5
‑
手指固定机构;6
‑
限位槽;7
‑
锁紧螺母;8
‑
第一支架机构;9
‑
偏移转轴;10
‑
偏移驱动钢丝;11
‑
第一支架导向轮组;12
‑
前环机构;13
‑
手腕屈伸转轴;14
‑
手腕屈伸驱动钢丝;15
‑
第一支架底部导向轮组;16
‑
臂托机构;17
‑
弧形公导轨;18
‑
内圈弧形母导轨;19
‑
外圈弧形母导轨;20
‑
弧形齿条;21
‑
锥齿轮;22
‑
芯轴;23
‑
前臂旋转驱动钢丝;24
‑
前臂旋转导向轮组;25
‑
滚珠保持架;26
‑
滚珠保持架安装槽;27
‑
滚珠安装孔;28
‑
臂托底座;29
‑
滑轨;30
‑
位移驱动轴;31
‑
驱动齿轮;32
‑
驱动齿条;33
‑
位移驱动钢丝;34
‑
第二支架机构;35
‑
翻转轴管;36
‑
翻转驱动钢丝;37
‑
第二支架导向轮组;38
‑
屈伸轴管;39
‑
手肘屈伸驱动钢丝;40
‑
第二支架底部导向轮组。
具体实施方式
35.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
36.本发明针对现有主操作手需要多次转化动作信号以及部分主操作手各自由度相互干涉的问题,提供了一种七自由度解耦主操作手。
37.如图1所示,本发明的实施例提供了一种七自由度解耦主操作手,包括:手部剪切关节r1、手腕偏移关节r2、手腕屈伸关节r3、前臂旋转关节r4、前臂翻转关节r5和手肘屈伸关节r6逐一连接;所述前臂旋转关节r4与前臂翻转关节r5之间设置有水平位移驱动装置m1;所述手部剪切关节r1、手腕偏移关节r2、手腕屈伸关节r3、前臂旋转关节r4、前臂翻转关节r5、手肘屈伸关节r6和所述水平位移驱动装置m1均设置有两根钢丝,两根钢丝在对应关节或装置的两个方向传动。
38.本发明所述的七自由度解耦主操作手具有六个旋转自由度和一个平移自由度,每个自由度都对应设置有两根钢丝在一个自由度上的两个方向传动,当主操作手动作时钢丝能够将动作传递至机器人操作端,当机器人操作端运动时能够通过钢丝进行力反馈,本发明的七个自由度完全解耦,主操作手操纵时各自由度互不干涉,可独立运动。
39.如图2至图5所示,所述手部剪切关节r1由手指活动机构1和手掌定位机构2组成,所述手指活动机构1通过剪切转轴3转动地设置在所述手掌定位机构2顶部,所述剪切转轴3
上绕设有相连的两根剪切驱动钢丝4。
40.其中,所述手掌定位机构2的前端活动地插设有手指固定机构5,所述手掌定位机构2的底部开设有限位槽6,所述限位槽6设置有锁紧螺母7,所述手指固定机构5通过所述锁紧螺母7固定安装在所述手掌定位机构2前端。
41.本发明所述的七自由度解耦主操作手的第一个自由度为剪切运动,其中所述手指活动机构1和手指固定机构5上均设置有用于操作者抓持的圆环结构,操作者通过控制所述手指活动机构1朝向所述手指固定机构5旋转能够驱动所述剪切驱动钢丝4运动进而对应机器人执行器的剪切操作,所述手指固定机构5用于操作人员手指固定,所述手掌定位机构2设置有适应操作者手部大小的调节装置,所述手指固定机构5能够调节插入所述手掌定位机构2的深度,通过所述限位槽6控制伸缩行程,并通过所述锁紧螺母7固定所述手指固定机构5和手指活动机构1的相对位移。
42.如图5所示,所述手腕偏移关节r2由第一支架机构8和所述手掌定位机构2组成,所述手掌定位机构2的后端通过偏移转轴9转动地设置在所述第一支架机构8的上部,所述偏移转轴9上绕设有相连的两根偏移驱动钢丝10。
43.其中,所述剪切驱动钢丝4穿过所述偏移转轴9的中心通孔引入所述第一支架机构8,所述剪切驱动钢丝4和偏移驱动钢丝10均通过第一支架导向轮组11导向引出所述第一支架机构8;所述剪切驱动钢丝4位于所述偏移转轴9中心通孔的部分为腱鞘结构。
44.本发明所述的七自由度解耦主操作手的第二个自由度为用于手腕偏移的自由度,操作者的手指分别抓持在所述手指活动机构1和手指固定机构5上后,所述手掌定位机构2能够相对所述第一支架机构8旋转从而接收操作者手掌的偏移运动,在接收到动作后会通过所述偏移驱动钢丝10对动作产生的位移进行传递;所述剪切驱动钢丝4首先通过剪切导向轮组导向引入至所述第一支架8内,所述剪切驱动钢丝4和偏移驱动钢丝10都会通过所述第一支架导向轮组11导向引出,所述剪切驱动钢丝4腱鞘部分的中部为钢丝外层设置有弹簧管,钢丝与弹簧管之间涂设有润滑脂,因此保证所述剪切驱动钢丝4在经过所述偏移转轴9中心通孔时即使出现弯折,中部钢丝仍能进行传动。
45.如图5和图6所示,所述手腕屈伸关节r3由前环机构12和所述第一支架机构11组成,所述第一支架机构11的下部通过手腕屈伸转轴13转动地设置在所述前环机构12的前端底部,所述手腕屈伸转轴13上绕设有相连的两根手腕屈伸驱动钢丝14,所述手腕屈伸驱动钢丝14通过第一支架底部导向轮组15导向引出所述第一支架机构11。
46.本发明所述的七自由度解耦主操作手的第三个自由度为用于手腕屈伸的自由度,所述第一支架机构11能够相对所述前环机构12旋转,从而接收操作者手腕的屈伸运动,并通过所述手腕屈伸驱动钢丝14将运动传递至外部。
47.如图7和图8所示,所述前臂旋转关节r4由臂托机构16和所述前环机构12组成,所述臂托机构16上固定设置有弧形公导轨17,所述前环机构12的后端固定设置有内圈弧形母导轨18和外圈弧形母导轨19,所述弧形公导轨17滑动地设置在所述内圈弧形母导轨18和外圈弧形母导轨19之间;所述弧形公导17轨沿圆周方向设置有弧形齿条20,所述前环机构12转动地设置有锥齿轮21,所述锥齿轮21的圆心处穿设有芯轴22,所述锥齿轮21与所述弧形齿条20啮合传动,所述芯轴22上绕设有两根相连的前臂旋转驱动钢丝23,所述前臂旋转驱动钢丝23通过前臂旋转导向轮组24导向引出所述前环机构12。
48.本发明所述的七自由度解耦主操作手的第四个自由度为用于手臂翻转的自由度,所述前臂旋转关节r4中,所述前环机构12的后端开设有两排壳体螺纹孔,所述内圈弧形母导轨18和外圈弧形母导轨19分别通过两排所述壳体螺纹孔与所述前环机构12连接,所述弧形公导轨17底部设置有多个圆周排列的公导轨螺纹孔,所述弧形公导轨17通过所述公导轨螺纹孔安装在所述臂托机构16上,所述弧形公导轨17的两侧分别设置有滚珠保持架25,所述内圈弧形母导轨18和外圈弧形母导轨19上开设有滚珠保持架安装槽26,所述滚珠保持架25的上下两侧均开设有多个滚珠安装孔27,每个所述滚珠安装孔27内均设置有滚珠,所述滚珠外露的两端分别与所述弧形公导轨17和内圈弧形母导轨18或外圈弧形母导轨19接触;所述锥齿轮21的中心开设有方孔,所述芯轴22的中部为方形轴段,所述芯轴22的方形轴段与所述锥齿轮21的方孔配合,所述芯轴22上开设有螺旋槽,所述前臂旋转驱动钢丝23绕设在所述螺旋槽内;因此当操作者旋转前臂时,所述前环机构12会相对臂托机构16旋转,旋转的过程中所述锥齿轮21在所述弧形齿条20上啮合转动进而将旋转运动传动至所述前臂旋转驱动钢丝23上进而将运动传递至外部。
49.如图9、10和图11所示,所述水平位移驱动装置m1由臂托底座28和所述臂托机构16组成,所述臂托机构16通过两组滑轨29滑动地设置在所述所述臂托底座28上,所述臂托底座28的侧面转动地穿设有位移驱动轴30,所述位移驱动轴30的端头设置有驱动齿轮31,所述臂托机构16的侧面设置有驱动齿条32,所述驱动齿轮31与驱动齿条32啮合,所述位移驱动轴30上绕设有两根相连的位移驱动钢丝33。
50.本发明所述的七自由度解耦主操作手的第五个自由度为用于手臂前后位移的自由度,当操作者的手臂位于所述臂托机构16时,操作者手臂伸缩时会推动所述臂托机构16同步沿所述滑轨29运动,同时所述驱动齿条32会带动所述驱动齿轮31旋转,进而通过所述位移驱动钢丝33将运动传递至外部。
51.如图12、13和图14所示,所述前臂翻转关节由第二支架机构34和所述臂托底座28组成,所述臂托底座28通过翻转轴管35转动地连接所述第二支架机构34的上部,所述翻转轴管35上绕设有两根相连的翻转驱动钢丝36,所述位移驱动钢丝33由所述翻转轴管35的中心通孔引入所述第二支架机构34,所述位移驱动钢丝33和翻转驱动钢丝36均通过第二支架导向轮组37导向引出所述第二支架机构34;所述位移驱动钢丝33位于所述翻转轴管35中心通孔的部分为腱鞘结构。
52.本发明所述的七自由度解耦主操作手的第六个自由度为用于手臂翻转的自由度,所述臂托底座28能够相对于所述第二支架机构34旋转,因此当操作者的手臂固定于所述臂托机构16并翻转时能够驱动所述臂托底座28相对于所述第二支架机构34旋转,所述翻转轴管35会随之转动从而带动所述翻转驱动钢丝36将运动传递至外部;所述位移驱动钢丝33首先通过位移驱动导向轮组导向引入所述翻转轴管35中心通孔进入到到第二支架机构34内,所述位移驱动钢丝33和翻转驱动钢丝36均通过第二支架导向轮组37导向引出所述第二支架机构34,为保证所述位移驱动钢丝33经过弯折仍能传动,因此所述所述位移驱动钢丝33位于所述翻转轴管35中心通孔的部分也设置为腱鞘结构。
53.如图15所示,所述手肘屈伸关节r6由操作手底座38和所述第二支架机构34组成,所述第二支架机构34的底部通过屈伸轴管38转动地设置在所述操作手底座38上,所述屈伸轴管38上绕设有两根相连的手肘屈伸驱动钢丝39,所述手肘屈伸驱动钢丝39通过第二支架
底部导向轮组40导向引出所述第二支架机构34。
54.本发明所述的七自由度解耦主操作手的第七个自由度为用于手肘屈伸的自由度,所述第二支架机构34能够相对于所述操作手底座38旋转,当操作者的手肘运动时,能够驱动所述第二支架机构34旋转,进而所述屈伸轴管38会随之旋转,并通过所述手肘屈伸驱动钢丝39将手肘的屈伸运动传递至外部。
55.本发明所述的七自由度解耦主操作手具有六个旋转自由度和一个平移自由度,六个旋转自由度分别用于接收剪切运动、手腕偏移、手腕屈伸、前臂旋转、手臂翻转和手肘屈伸运动,平移自由度用于接收手臂平移运动,每个自由度都对应设置有两根钢丝在一个自由度上的两个方向传动,当主操作手动作时钢丝能够将动作传递至机器人操作端,当机器人操作端运动时能够通过钢丝进行力反馈,本发明的七个自由度完全解耦,主操作手操纵时各自由度互不干涉,可独立运动。
56.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。