1.本发明属于生物力学仪器领域,特别涉及一种磁控细胞动态力学刺激培养装置及细胞动态力学刺激方法。
背景技术:
2.天然骨骼肌、心肌、神经等组织器官的细胞均具有取向排列的特点。这一结构特点是这些组织器官能够发挥某些重要生理功能的基础,如骨骼肌能沿某一方向收缩舒张,神经能沿某一方向传导动作电位等。另外,发育成熟的体内组织中,多数细胞都经过高度分化并表达特征的功能蛋白。如成熟骨骼肌表达肌球蛋白重链,成熟神经细胞表达微管相关蛋白。近年来,随着生命科学研究的推进,研究者们进行上述组织器官功能化体外仿生模型构建时,迫切需要能有效重现天然组织取向特征,并诱导其细胞分化并表达功能蛋白的方法。
3.细胞生物力学是生物力学领域的前沿分支,涉及力学载荷作用下细胞状态的变化规律及机制作用的研究。现有报道表明,力学刺激对促进细胞的取向排列、诱导成熟分化及相关蛋白表达等均具有重要调控作用。
4.现有的细胞生物力学加载设备按照作用力的产生及传导方式,具体分为机械加载设备和气动加载设备。
5.机械加载设备是直接将受力部(如具有细胞的材料或组织块)与传动杆连接,然后通过电机带动传动杆,将机械力循环加载到受力部。这种机械加载设备被目前科研主流采用,但也具有以下缺点:1、通过类似齿轮传动的方式,为受力部加载连续变化的作用力。而天然骨骼肌、心肌、平滑肌产生肌力、骨或软骨细胞承受压缩应力,神经细胞产生动作电位等生理过程的变化模式都是动态的、突变的,因此该连续变化的作用力不能实现良好仿生。2、在传动杆来回抽拉的过程中,容易把细胞培养模块外的细菌带入培养仓内,造成染菌。3、因为传动杆的存在与加载力源和控制系统成为一个整体,不利于各个部分的模块化分区管理。例如,更换培养仓时就不得不拆除传动杆;检修电机时要顾及培养仓染菌问题。
6.气动加载设备是将受力部的两端分别与气囊相连,然后通过对气囊通气,改变气囊的膨胀幅度,进而带动受力部形变。但这种设置也具有以下缺点:1、只能通过吸气和放气的方式加载连续变化的作用力,并不能实现良好仿生。2、因气囊膨胀幅度有限,因此受力部的应变幅度受到限制。如市售flexcell5000的拉伸应变仅范围为0%~33%,不能满足更高应变的实验需求。
7.因此,针对现有细胞动态力学刺激培养装置的技术不足,提供一种磁控细胞动态力学刺激培养装置及细胞动态力学刺激方法以解决现有技术不足甚为必要。
技术实现要素:
8.本发明的其中一个目的在于避免现有技术的不足之处而提供一种磁控细胞动态力学刺激培养装置。该磁控细胞动态力学刺激培养装置能产生突变及较大应变范围的拉伸
或压缩作用,从而能较好地仿生天然骨骼肌、心肌、平滑肌产生肌力、骨或软骨细胞承受压缩应力,以及仿生神经细胞产生动作电位等动态、突变的生理过程,而且染菌概率低。
9.本发明的上述目的通过以下技术措施实现:
10.提供一种磁控细胞动态力学刺激培养装置,设置有主体外框架、细胞培养模块和用于对细胞培养模块产生磁场的电磁模块,细胞培养模块和电磁模块分别装配于主体外框架,细胞培养模块与电磁模块电磁连接。
11.所述细胞培养模块设置有培养仓和受所述电磁模块磁力支配产生应变的应变组件,所述培养仓装配于所述主体外框架,所述应变组件可拆卸装配于所述培养仓的内部,所述应变组件与所述电磁模块电磁连接,所述电磁模块位于所述培养仓的外部。
12.优选的,上述应变组件设置有定子、磁吸动子和用于接种细胞的受力部,所述受力部的一侧边与所述定子固定连接,所述受力部的另一侧边与所述磁吸动子固定连接,且所述定子和所述磁吸动子相对而设置,所述定子固定装配于所述培养仓的内部,所述磁吸动子活动于所述培养仓的内部。
13.优选的,上述定子为中空结构的定子,且所述受力部的一侧边固定嵌装于所述定子的中空结构。
14.优选的,上述磁吸动子为中空结构的磁吸动子,且所述受力部的另一侧边固定嵌装于所述磁吸动子的中空结构。
15.优选的,上述磁吸动子的外表面包裹有第一弹性层,所述受力部的一侧边与第一弹性层一体连接。
16.优选的,上述定子的外表面包裹有第二弹性层,且所述受力部的另一侧边第二弹性层一体连接。
17.优选的,上述细胞培养模块还设置用于使所述磁吸动子悬浮于所述培养仓的浮力部和盖体,所述浮力部漂浮于所述培养仓的承装的培养液的表面,所述应变组件可拆卸装配于所述培养仓的内部,所述盖体扣合于所述培养仓的上底面。
18.优选的,上述浮力部设置有浮力皿和定位铁块,所述浮力皿漂浮于所述培养仓的内部,所述定位铁块放置于所述浮力皿的中心,且所述定位铁块与所述磁吸动子磁吸连接。
19.优选的,上述培养仓设置有固定槽、拉伸槽和换液槽,固定槽、拉伸槽和换液槽均位于所述培养仓的内表面,且所述拉伸槽和所述换液槽分别与所述固定槽连通,所述定子可拆卸嵌装于所述固定槽,所述磁吸动子活动于所述拉伸槽。
20.将所述拉伸槽与所述固定槽的长度之和定义为a,将所述应变组件在原始状态下的长度定义b,存在1cm≤1.5b≤a≤3b。
21.优选的,上述培养仓还设置有用于将所述电磁模块的磁场传导至所述拉伸槽的导磁部和放置槽,所述导磁部嵌装于所述培养仓,且所述导磁部与所述拉伸槽的位置相对应,所述导磁部与所述电磁模块的侧面抵接,且所述导磁部与所述电磁模块电磁连接,所述放置槽位于所述培养仓的外表面,所述电磁模块位于所述放置槽的外侧面,所述导磁部装配于所述放置槽。
22.本发明的磁控细胞动态力学刺激培养装置,还设置有用于通过蓝牙控制电磁场大小的智能化控制电路模块,智能化控制电路模块与电磁模块电连接,且所述智能化控制电路模块可拆卸装配于所述主体外框架。
23.优选的,上述电磁模块设置有电磁铁l1和变阻电位器r1,电磁铁l1和变阻电位器r1与所述智能化控制电路模块电连接,电磁铁l1与变阻电位器r1电连接,电磁铁l1与所述导磁部抵接,且所述导磁部与电磁铁l1电磁连接。
24.优选的,上述智能化控制电路模块设置有继电器模组k1、控制芯片u1、蓝牙芯片u2、直流电源bt1、耦合电容c1、耦合电容c2、耦合电容c3和led1,蓝牙芯片u2的rxd端与控制芯片u1的d1/tx端连接,蓝牙芯片u2的txd端与控制芯片u1的d0/rx端连接,蓝牙芯片u2的gnd端接地,蓝牙芯片u2的vcc端与继电器模组k1的vcc端连接,控制芯片u1的d8端与继电器模组k1的in端连接,控制芯片u1的gnd端接地,控制芯片u1的5v端与继电器模组k1的vcc端连接,耦合电容c1的正极、耦合电容c2的正极、耦合电容c3的正极和led1的正极均与继电器模组k1的vcc端连接,耦合电容c1的负极、耦合电容c2的负极、耦合电容c3的负极和led1的负极均接地,继电器模组k1的gnd端接地,继电器模组k1的com端与直流电源bt1的负极连接,继电器模组k1的no端与变阻电位器r1的一个固定端及调节端连接,变阻电位器r1的另一个固定端与电磁铁l1的一侧边连接,电磁铁l1的另一端与直流电源bt1的正极连接。
25.优选的,上述控制芯片u1的型号为arduino uno r3芯片、arduino uno r2芯片、arduino nano芯片、arduino mega芯片或者arduino leonardo芯片,继电器模组k1的型号为relay module v4.0,蓝牙芯片u2的型号为hc
‑
06、hc
‑
05或者具有蓝牙传输功能的pcba板,耦合电容c1、耦合电容c2和耦合电容c3的电容值均为4.7微法,直流电源bt1的电压值为12v,变阻电位器r1为机械式或数控式电位器,且变阻电位器r1的最大电阻值为10欧~5000欧,电磁铁l1为最大吸力为5kg~500kg,且电磁铁l1的形状为圆形或方形电磁铁l1。
26.优选的,上述磁吸动子为钕铁硼磁铁。
27.优选的,上述定子为硅胶定子。
28.优选的,上述受力部为弹性膜或者3d打印的仿生组织。
29.优选的,上述培养仓为玻璃培养仓、亚克力培养仓、光敏树脂培养仓或者透明硅胶培养仓。
30.优选的,上述第一弹性层和第二弹性层均为硅胶层。
31.本发明的磁控细胞动态力学刺激培养装置,还设置有用于观察受力部中细胞的显微组件和用于将受力部嵌装于所述定子及所述磁吸动子的定位嵌入仪,显微组件设于所述培养仓的下方且与所述拉伸槽的位置相对应,定位嵌入仪为独立的结构。
32.本发明的另一个目的在于避免现有技术的不足之处而提供一种磁控细胞动态力学刺激方法。该磁控细胞动态力学刺激方法能产生突变及较大应变范围的拉伸或压缩作用,从而能较好地仿生天然骨骼肌、心肌、平滑肌产生肌力、骨或软骨细胞承受压缩应力,以及仿生神经细胞产生动作电位等动态、突变的生理过程,而且染菌概率低。
33.本发明的上述目的通过以下技术措施实现:
34.提供一种磁控细胞动态力学刺激方法,采用上述的磁控细胞动态力学刺激培养装置进行。
35.本发明的一种磁控细胞动态力学刺激培养装置及细胞动态力学刺激方法,其中该磁控细胞动态力学刺激培养装置设置有主体外框架、细胞培养模块和用于对细胞培养模块产生磁场的电磁模块,细胞培养模块和电磁模块分别装配于主体外框架,细胞培养模块与电磁模块电磁连接;所述细胞培养模块设置有培养仓和受所述电磁模块磁力支配产生应变
的应变组件,所述培养仓装配于所述主体外框架,所述应变组件可拆卸装配于所述培养仓的内部,所述应变组件与所述电磁模块电磁连接,所述电磁模块位于所述培养仓的外部。本发明与现有技术相比的有益效果是:(1)采用以磁场施加生物力学载荷的技术方案。因磁场的分布不受培养仓的阻隔,故拉伸动力源与培养仓能完全分离,降低了培养仓的染菌概率,也有利于仪器整体的模块化分区管理与工作。(2)本发明采用施加生物力学载荷的磁场由电磁模块产生,因此,能通过控制电磁模块的电流大小、方向,即可以即时控制磁场的强弱、极性和变化模式,从而力学的控制更加便捷有效。(3)本发明所施加生物力学载荷可以更符合仿生学要求。(4)、本发明所施加的生物力学载荷可保证
‑
30%~100%的应变施加范围。
附图说明
36.利用附图对本发明作进一步的说明,但附图中的内容不构成对本发明的任何限制。
37.图1为培养仓的结构示意图。
38.图2为应变组件和导磁部装配于培养仓后的结构示意图。
39.图3为细胞培养模块的结构示意图。
40.图4为定位嵌入仪的结构示意图。
41.图5为在定位嵌入仪对应变组件装配时,应变组件的结构示意图。
42.图6为图5的分解示意图。
43.图7为在未启动拉伸刺激时,低密度(20%~30%)接种的c2c12细胞培养5天后的取向及分化效果。
44.图8为在未启动拉伸刺激时,高密度(50%~70%)接种的c2c12细胞培养5天后的取向及分化效果。
45.图9为实施例1的启动拉伸刺激后,低密度(20%~30%)接种的c2c12细胞培养5天后的取向及分化效果。
46.图10为实施例1的启动拉伸刺激后,高密度(50%~70%)接种的c2c12细胞培养5天后的取向及分化效果。
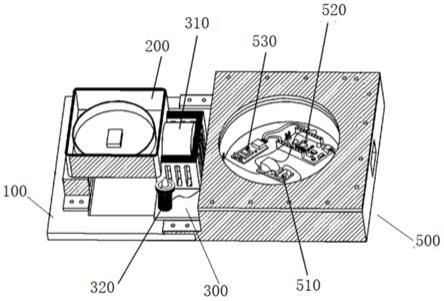
47.图11为实施例2的一种磁控细胞动态力学刺激培养装置的结构示意图。
48.图12为智能化控制电路模块和电磁模块的电路图。
49.图13为图12中的继电器模组放大图。
50.图14为图12中的控制芯片放大图。
51.图15为实施例3的一种磁控细胞动态力学刺激培养装置的结构示意图。
52.在图1至图15中,包括有:
53.主体外框架100、
54.细胞培养模块200、
55.培养仓210、固定槽2111、拉伸槽2112、换液槽2113、放置槽2114、浮力部212、浮力皿2121、定位铁块2122、
56.应变组件220、定子221、磁吸动子222、受力部223、
57.导磁部230、
58.电磁模块300、电磁铁310、变阻电位器320、
59.显微组件400、
60.智能化控制电路模块500、继电器模组510、控制芯片520、蓝牙芯片530、
61.定位嵌入仪600、架体610、夹具620、z轴升降调节部630、xy轴平移调节部640、
62.硅胶模具700。
具体实施方式
63.结合以下实施例对本发明的技术方案作进一步说明。
64.实施例1。
65.一种磁控细胞动态力学刺激培养装置,如图1至3所示,设置有主体外框架100、细胞培养模块200和用于对细胞培养模块200产生磁场的电磁模块300,细胞培养模块200和电磁模块300分别装配于主体外框架100,细胞培养模块200与电磁模块300电磁连接。
66.细胞培养模块200设置有培养仓210和受所述电磁模块300磁力支配产生应变的应变组件220,所述培养仓210装配于所述主体外框架100,所述应变组件220可拆卸装配于所述培养仓210的内部,所述应变组件220与所述电磁模块300电磁连接,所述电磁模块300位于所述培养仓210的外部。
67.应变组件220设置有定子221、磁吸动子222和用于接种细胞的受力部223,所述受力部223的一侧边与所述定子221固定连接,所述受力部223的另一侧边与所述磁吸动子222固定连接,且所述定子221和所述磁吸动子222相对而设置,所述定子221固定装配于所述培养仓210的内部,所述磁吸动子222活动于所述培养仓210的内部。
68.需要说明的是,本发明的应变组件220是在受力部223相对两侧边对受力部223所在平面进行拉伸或者压缩,且磁吸动子222和定子221只在与受力部223的两个相对侧边固定则可以,磁吸定子221的体积并不会受受力部223的大小限制。沿受力部223的拉伸或压缩方向得到受力部223的横截面,当电磁模块300对磁吸动子222产生磁场时,磁吸动子222将作用力沿该横截面从受力部223的一侧边传导至受力部223的另一侧边。该横截面的面积远小于受力部223的表面积,因此作用力在该横截面的压强较大,从而能实现较大的应变。
69.经多次实验验证,本发明的生物力学载荷应变范围可达
‑
30%~100%,本发明与现有技术的机械加载设备的拉伸应变范围相当,并明显优于气动加载设备的拉伸应变范围。
70.本发明定子221为中空结构的定子221,且受力部223的一侧边固定嵌装于定子221的中空结构;磁吸动子222为中空结构的磁吸动子222,且受力部223的另一侧边固定嵌装于磁吸动子222的中空结构。
71.需要说明的是,本发明的定子221和磁吸动子222均为中空结构,而受力部223的两侧边均固定嵌装于这两个中空结构。这样的目的是增加定子221和磁吸动子222与受力部223之间的接触面积,从而能提高受力部223与定子221和磁吸动子222之间,在拉伸或压缩时的牢固程度。
72.需要说明的是,本发明的受力部223可以为弹性膜、3d打印的仿生组织或者组织块等,其中弹性膜具体为pdms膜。其中培养仓210可以选用玻璃、亚克力、光敏树脂或者透明硅胶等无细胞毒性材料制成的培养仓210。
73.本发明的磁吸动子222的外表面包裹有第一弹性层,受力部223的一侧边与第一弹
性层一体连接。定子221的外表面包裹有第二弹性层,且受力部223的另一侧边第二弹性层一体连接。
74.需要说明的是,本发明的受力部223的两侧边是通过第一弹性层和第二弹性层分别与磁吸动子222和定子221进行固定的。
75.细胞培养模块200还设置用于使所述磁吸动子222悬浮于所述培养仓210的浮力部212和盖体,所述浮力部212漂浮于所述培养仓210的承装的培养液的表面,所述应变组件220可拆卸装配于所述培养仓210的内部,所述盖体扣合于所述培养仓210的上底面。
76.其中,本发明的盖体为市售100
×
100mm方形聚苯乙烯细胞培养皿盖。
77.本发明的浮力部212设置有浮力皿2121和定位铁块2122,所述浮力皿2121漂浮于所述培养仓210的内部,所述定位铁块2122放置于所述浮力皿2121的中心,且所述定位铁块2122与所述磁吸动子222磁吸连接。
78.培养仓210设置有固定槽2111、拉伸槽2112和换液槽2113,固定槽2111、拉伸槽2112和换液槽2113均位于所述培养仓210的内表面,且所述拉伸槽2112和所述换液槽2113分别与所述固定槽2111连通,所述定子221可拆卸嵌装于所述固定槽2111,所述磁吸动子222活动于所述拉伸槽2112。
79.需要说明的是,当培养仓210承装培养液后,能交浮力皿2121漂浮于培养仓210的内部,此时定位铁块2122与磁吸动子222磁吸连接,浮力皿2121同时对定位铁块2122和磁吸动子222产生浮力。故能使磁吸动子222悬浮在培养液中,磁吸动子222并不会与培养仓210底面接触,从而减少磁吸动子222与培养仓210之间摩擦力,以保证在磁场作用下的拉伸或压缩作用及弹性复位的顺利进行。
80.将拉伸槽2112和固定槽2111的长度之和定义为a,将应变组件220在原始状态下的长度定义b,存在1cm≤1.5b≤a≤3b。
81.需要说明的是,本发明的换液槽2113的作用是在不接触施力对象所在的拉伸槽2112下,能更换拉伸槽2112内部的培养液。
82.当拉伸槽2112的长度大于等于应变组件220在原始状态下的长度的1.5倍时,能够为对磁吸动子222提供充足的活动距离。
83.培养仓210还设置有用于将所述电磁模块300的磁场传导至所述拉伸槽2112的导磁部230和放置槽2114,所述导磁部230嵌装于所述培养仓210,且所述导磁部230与所述拉伸槽2112的位置相对应,所述导磁部230与所述电磁模块300的侧面抵接,且所述导磁部230与所述电磁模块300电磁连接,所述放置槽2114位于所述培养仓210的外表面,所述电磁模块300位于所述放置槽2114的外侧面,所述导磁部230装配于所述放置槽2114。
84.本发明的导磁部230的作用是将电磁模块300的磁场传导至磁吸动子222,保证磁力拉伸或压缩的顺利进行。
85.本发明的磁吸动子222为n52、n48或n44钕铁硼磁铁,定子221为硅胶定子221,导磁部230为导磁铁芯。第一弹性层和第二弹性层均为pdms层和硅胶层。
86.本发明的磁控细胞动态力学刺激培养装置,还设置有用于将受力部223嵌装于定子221及磁吸动子222的定位嵌入仪600。定位嵌入仪600设置有架体610,用于固定受力部223、定子221或者磁吸动子222的夹具620,z轴升降调节部630和xy轴平移调节部640,夹具620装配于架体610,xy轴平移调节部640固定装配于z轴升降调节部630的上底面,如图4。
87.需要说明的是,本发明的z轴升降调节部630、xy轴平移调节部640和夹具620均通过市售途径获得。
88.本发明磁控细胞动态力学刺激培养装置的使用方法如下:取0.08mm的pdms膜,切割所需要形状,然后将受力部223与磁吸动子222和定子221固定得到应变组件220。再使用75%乙醇浸泡30分钟对应变组件220消毒,并放置在超净台内晾干准备。使用75%乙醇浸泡30分钟对培养仓210消毒,并将培养仓210超净台内晾干后,将应变组件220的定子221装入培养仓210的固定槽2111。然后将细胞接种于受力部223的表面,本实施例以胰酶消化10代内的c2c12小鼠成肌细胞作为具体的细胞。最后通过电磁模块300对磁吸动子222产生磁场,使磁吸动子222对受力部223进行拉伸或压缩。实验结束取下pdms膜,通过live/dead染色后,置于荧光显微镜下观察。
89.其中,本发明的以胰酶消化10代内的c2c12小鼠成肌细胞接种,对本发明接种细胞方法进行说明,具体如下:对胰酶消化10代内的c2c12小鼠成肌细胞进行离心,全培重悬后,全培稀释至20%~30%或50%~70%的细胞接种密度,滴加200微升于受力部223上,完成细胞接种。然后在37℃静置3小时后,细胞完成初步贴附。继续加入50ml~60ml全培液,在无菌操作下安装浮力皿2121和定位铁块2122,盖上培养仓210盖子。再将导磁部230嵌装入放置槽2114后,将细胞培养仓210整体放入培养箱内,在37℃、5%co2条件下静置12h,使细胞完成黏附。当胰酶消化10代内的c2c12小鼠成肌细胞作为接种细胞时,本实施例的通过电磁模块300,使受力部223的拉伸应变在20%~50%,结果如图7至10所示。
90.需要说明的是,本实施例的接种细胞还可为胰酶消化25代内的pc12肾上腺髓质嗜铬瘤细胞。当胰酶消化25代内的pc12肾上腺髓质嗜铬瘤细胞作为接种细胞时,本发明的通过电磁模块300,使受力部223的拉伸应变在20%~50%。
91.其中,本发明的受力部223与磁吸动子222和定子221的具体固定方法如下:
92.第一步,用蛋白对受力部223表面进行涂层包裹处理,然后将受力部223的一侧边夹在持在夹具620,受力部223的另一端在重力作用下自由下垂;
93.第二步,将磁吸动子222放入预制的pdms硅胶模具700内,再将两者放在xy轴平移调节部640,调节xy轴平移调节部640和z轴升降调节部630,使受力部223正好处在磁吸动子222中空结构的正中心;
94.第三步,往预制的pdms硅胶模具700内倒入未固化的pdms,使受力部223的一侧边及磁吸动子222完全淹没于pdms内;
95.第四步,再将夹具620、受力部223、磁吸动子222及pdms硅胶模具700整体放入60度烤箱内一小时完成pdms固化,使磁吸动子222及受力部223的一侧边完全镶嵌于预制的pdms硅胶模具700内,然后拆除pdms硅胶模具700,固化后pdms为第一弹性层;
96.第五步,表面包裹有弹性层的磁吸动子222夹持于夹具620,受力部223的另一端在重力作用下自由下垂;
97.第六步,将定子221放入预制的pdms硅胶模具700内,再将两者放在xy轴平移调节部640,调节xy轴平移调节部640和z轴升降调节部630,使受力部223的另一侧边正好处在定子221中空结构的正中心;
98.第七步,往预制的pdms硅胶模具700内倒入未固化的pdms,使受力部223的另一侧边及定子221完全淹没于pdms内,如图5和6;
99.第八步,再将夹具620、受力部223、磁吸动子222、定子221及pdms硅胶模具700整体放入60度烤箱内一小时完成pdms固化,如图5和6,使定子221及受力部223的另一侧边完全镶嵌于预制的pdms硅胶模具700内,然后拆除pdms硅胶模具700,固化后pdms为第二弹性层,并得到应变组件220。
100.该磁控细胞动态力学刺激培养装置,通过电磁模块300对细胞培养模块200产生磁场,从而产生突变作用力,故能较好地仿真细胞动态力学。因此在电磁模块300通过产生磁场对细胞培养模块200施加作用,因为磁场的分布不受阻隔,故电磁模块300与细胞培养模块200能完全分离,降低了培养仓210的染菌概率。
101.具体的与现有技术相比,本发明具有如下有益效果:
102.(1)、本发明采用以磁场施加生物力学载荷的技术方案。因磁场的分布不受培养仓210的阻隔,故拉伸动力源与培养仓210能完全分离,降低了培养仓210的染菌概率,也有利于仪器整体的模块化分区管理与工作。现有的生物力学刺激细胞培养装置采用以机械式加载为主的技术方案,以电机提供动力,传动杆穿过培养仓210的壁面施加生物力学载荷。因为在传动杆来回抽拉的过程中,容易把细胞培养仓210外的细菌带入培养仓210内,增加染菌机率。培养仓210因为传动杆的存在而与加载力源和控制系统成为一个整体,不利于各个部分的模块化分区管理。
103.(2)、本发明采用施加生物力学载荷的磁场由电磁模块300产生,因此,能通过控制电磁模块300的电流大小、方向,即可以即时控制磁场的强弱、极性和变化模式,从而力学的控制更加便捷有效。与现有技术相比,上述施加生物力学载荷,本发明能够控制电磁模块300产生多种拉伸方式,如点动拉伸,这是现有技术所不能实现的。
104.(3)、天然骨骼肌、心肌、平滑肌产生肌力、骨或软骨细胞承受压缩应力,以及神经细胞产生动作电位等生理过程的变化模式都是动态的、突变的。本发明能产生突变及较大应变范围的拉伸或压缩作用,从而这种施加生物力学载荷能更好地符合仿生学要求。现有的机械式加载方案并不能很好模拟这一特点,而本发明能通过控制电磁模块300产生点动拉伸,所施加拉伸载荷于通电流的瞬间即可达到设定值,停电流的瞬间施加的拉伸载荷即可消失,这与上述动态,突变的生理过程相似。
105.(4)、本发明所施加的生物力学载荷可保证
‑
30%~100%的应变施加范围,该性能与传统机械式加载方案相当,明显优于气动加载方案。
106.(5)、本发明磁控细胞动态力学刺激培养装置的主体外框架100和细胞培养模块200均采用3d打印、cnc切割等新兴制造手段加工。从而该细胞动态力学刺激培养装置的总体设计符合模块化工作管理原则,支持无工具拆卸、拼装、扩展。该细胞动态力学刺激培养装置体积小、消毒简便,从而使用要求与现有细胞培养间的现实实验条件相匹配。而现有技术的生物力学刺激细胞培养装置不支持无工具拆卸组装,部分生物力学刺激细胞培养装置使用要求无菌级别相对较高。
107.(6)、本发明的受力部223的种类具有多种多样,如硅胶、树脂、橡胶等类型的弹性薄膜材料;水凝胶、蛋白凝胶等类型的弹性块状材料;有弹性的天然组织块及组织工程化组织器官等。本发明受力部223的细胞接种类型也是多种多样的,如骨骼肌心肌的成肌细胞、神经细胞、成纤维细胞等。
108.实施例2。
109.一种磁控细胞动态力学刺激培养装置,如图11至14所示,其他特征与实施例1相同,还具有如下特性:还设置有用于通过蓝牙控制电磁场大小的智能化控制电路模块500,智能化控制电路模块500与电磁模块300电连接,且所述智能化控制电路模块500可拆卸装配于所述主体外框架100。
110.需要说明的是,因为磁场为一种在空间中分布的力场,与机械力传导需要实物作为介质不同,磁场传导不需要实物作为介质,也不易受一般物质所阻隔。而且磁场可由电流产生,因此本发明的通守智能化控制电路模块500控制电磁模块300的电流大小、方向,从而产出不同的变化模式。这些变化模式能够通过智能化控制电路模块500调节,控制电磁模块300产生磁场的强弱、极性。目前,采用arduino uno芯片为代表的智能芯片可通过计算机对电信号输出进行个性化调节,并且该arduino uno芯片输出模式可通过一般移动设备的蓝牙功能进行实时遥控。
111.电磁模块300设置有电磁铁310l1和变阻电位器320r1,电磁铁310l1和变阻电位器320r1与所述智能化控制电路模块500电连接,电磁铁310l1与变阻电位器320r1电连接,电磁铁310l1与所述导磁部230抵接,且所述导磁部230与电磁铁310l1电磁连接。
112.智能化控制电路模块500设置有继电器模组510k1、控制芯片520u1、蓝牙芯片530u2、直流电源bt1、耦合电容c1、耦合电容c2、耦合电容c3和led1,蓝牙芯片530u2的rxd端与控制芯片520u1的d1/tx端连接,蓝牙芯片530u2的txd端与控制芯片520u1的d0/rx端连接,蓝牙芯片530u2的gnd端接地,蓝牙芯片530u2的vcc端与继电器模组510k1的vcc端连接,控制芯片520u1的d8端与继电器模组510k1的in端连接,控制芯片520u1的gnd端接地,控制芯片520u1的5v端与继电器模组510k1的vcc端连接,耦合电容c1的正极、耦合电容c2的正极、耦合电容c3的正极和led1的正极均与继电器模组510k1的vcc端连接,耦合电容c1的负极、耦合电容c2的负极、耦合电容c3的负极和led1的负极均接地,继电器模组510k1的gnd端接地,继电器模组510k1的com端与直流电源bt1的负极连接,继电器模组510k1的no端与变阻电位器320r1的一个固定端及调节端连接,变阻电位器320r1的另一个固定端与电磁铁310l1的一侧边连接,电磁铁310l1的另一端与直流电源bt1的正极连接。
113.本发明的控制芯片520u1的型号为arduino uno r3芯片、arduino uno r2芯片、arduino nano芯片、arduino mega芯片或者arduino leonardo芯片等单片机,继电器模组510k1的型号为relay module v4.0,蓝牙芯片530u2的型号为hc
‑
06、hc
‑
05或者具有蓝牙传输功能的pcba板,耦合电容c1、耦合电容c2和耦合电容c3的电容值均为4.7微法,直流电源bt1的电压值为12v。变阻电位器320r1为机械式或数控式电位器,且变阻电位器320r1的最大电阻值为10欧~5000欧。电磁铁310l1为最大吸力为5kg~500kg,且电磁铁310l1的形状为圆形或方形电磁铁310l1。
114.本实施例的蓝牙芯片530u2具体型号为hc
‑
06,控制芯片520u1的具体型号为arduino uno r3芯片。电磁铁310l1具体最大吸力为60kg级的圆形电磁铁310l1。变阻电位器320r1具体为最大阻值为600欧的机械式变阻电位器320。
115.本发明的蓝牙芯片530u2的作用是与移动设备连接,从而能通过移动设备对培养箱内的仪器力学加载状态进行无线遥控指令调节,并将无线遥控指令发送至控制芯片520u1,而控制芯片520u1的作用是根据无线遥控指令调整输出工作电信号,并将输出工作电信号输送至继电器模组510k1。继电器模组510k1的作用是通过控制变阻电位器320r1的
电阻值调节电磁铁310l1工作电路电流大小,继电器模组510k1也能控制电流的通断,从而控制电磁场大小。
116.与实施例1相比,本实施例的磁控细胞动态力学刺激培养装置还具有如下有益效果:
117.(1)、本发明采用arduino uno芯片作为智能化控制电路模块500的控制芯片520,通过控制芯片520输出工作电信号。并且,arduino uno芯片作为编程平台,能够根据实际需要设定不同的程序满足个性化需求。而现有技术,获得电流变化(电子信号)的方式主要是通过信号发生器,这种信号发生器的体积大、成本高,还不能自主编程,不利于仪器小型化、简洁化及功能个性化。因此本发明智能化控制电路模块500具有成本低、体积小、简洁及能个性化设置程序的优点。
118.(2)、本发明的细胞动态力学刺激培养装置来还引入蓝牙技术,操作者可使用支持蓝牙功能的任意移动设备对该细胞动态力学刺激培养装置中的力学加载状态进行无线遥控调节,从而具有操作简单、有效、满足细胞学实验的现实需求。而现有大多数生物力学刺激细胞培养装置不支持类似的遥控功能。
119.(3)、本发明能通过智能化控制电路模块500控制,从而模仿天然骨骼肌、心肌、平滑肌产生肌力、骨或软骨细胞承受压缩应力,神经细胞产生动作电位等动态的,突变的生理过程的点动模式之外,还能控制电磁模块300产生多种施加拉伸或压缩载荷方式,如包括线性函数变化模式、正弦函数变化模式及指数函数变化模式等。
120.实施例3。
121.一种磁控细胞动态力学刺激培养装置,如图15所示,其他特征与实施例2相同,还具有如下特性:还设置有用于观察受力部223的显微组件400,显微组件400设于培养仓210的下方且与拉伸槽2112的位置相对应。
122.本实施例的显微组件400具体设置有升降台和数码显微镜,数码显微镜固定装配于升降台,且数码显微镜的视野位于拉伸槽2112的区域。其中数码显微镜的最大放大倍数300~1000倍。
123.与实施例1相比,本实施例还设置有显微组件400,从而实时观察记录受力部223的状态。
124.实施例4。
125.一种磁控细胞动态力学刺激培养装置,其他特征与实施例1相同,不同之处在于:本实例的受力部223为3d打印的仿生组织,具体为聚酯仿生软骨支架。
126.本发明的聚酯仿生软骨支架为通过3d打印的聚酯仿生软骨支架。
127.其中,以胰酶消化10代内的小鼠c2c12成肌细胞作为具体的受力部223的操作方法如下:对胰酶消化10代内的小鼠c2c12成肌细胞进行离心,全培重悬后,用已滤过除菌的甲基丙烯酸化明胶液稀释至70%的细胞接种密度,滴加1000微升于聚酯仿生软骨支架,405nm紫外灯照射15秒后,甲基丙烯酸化明胶发生光交联,发生由液体向水凝胶的转变。完成聚酯仿生软骨支架的细胞接种。继续加入50ml~60ml全培液,在无菌操作下安装浮力皿2121和定位铁块2122,盖上培养仓210盖子。再将导磁部230嵌装入放置槽2114后,将细胞培养仓210整体放入培养箱内,在37℃、5%co2条件下静置12h,使细胞完成黏附。当胰酶消化10代内的小鼠c2c12成肌细胞作为受力部223时,本发明的通过电磁模块300使受力部223的拉伸
应变在10%~30%。
128.需要说明的是,本实施例的聚酯仿生软骨支架接种的细胞还可以为胰酶消化10代内的mc3t3成骨细胞。当胰酶消化10代内的mc3t3成骨细胞为接种细胞时,本发明的通过电磁模块300,使受力部223的压缩应变在
‑
10%~
‑
30%。
129.本实施例的受力部223为聚酯仿生软骨支架,将以仿真天然骨骼肌的动态力学。
130.实施例5。
131.一种磁控细胞动态力学刺激方法,采用如实施例1至4任意一种磁控细胞动态力学刺激培养装置进行。
132.该磁控细胞动态力学刺激方法,与现有技术相比的有益效果是:(1)采用以磁场施加生物力学载荷的技术方案。因磁场的分布不受培养仓的阻隔,故拉伸动力源与培养仓能完全分离,降低了培养仓的染菌概率,也有利于仪器整体的模块化分区管理与工作。(2)本发明采用施加生物力学载荷的磁场由电磁模块产生,因此,能通过控制电磁模块的电流大小、方向,即可以即时控制磁场的强弱、极性和变化模式,从而力学的控制更加便捷有效。(3)本发明所施加生物力学载荷可以更符合仿生学要求。(4)、本发明所施加的生物力学载荷可保证
‑
30%~100%的应变施加范围。
133.最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。